1.本技术涉及医疗器械技术领域,特别的涉及一种脑深部电极自动植入系统。
背景技术:
2.脑深部刺激术(deep brain stimulation, dbs),又称为脑起搏器,主要通过对脑深部特殊核团的不同的慢性微电流刺激来治疗运动障碍性疾病。dbs手术包括术前磁共振定位计算靶点坐标,术中电生理信号记录确定靶点位置,刺激电极植入目标靶点,体外临时刺激观察患者症状改善,植入脉冲发生器等。其中,手术最关键的步骤在于术中准确定位靶点并精准完成电极植入,这一步骤直接决定了术后体外程控调整刺激参数难度及手术最终是否获得满意疗效。不同疾病选择不同的脑深部核团接受dbs刺激,例如丘脑底核(stn),苍白球内侧部(gpi),丘脑腹中间内侧核(vim)可作为治疗运动型障碍疾病的靶点,丘脑前核(atn)和海马可作为治疗药物难治性癫痫的靶点,伏隔核,内囊前肢,扣带前回可作为治疗精神疾病的靶点,中脑网状结构楔状核,中央中核-束旁核复合体(cm-pf)可作为治疗最小意识状态的靶点。dbs术中为了确保电极植入的精准度,常用的定位技术包括影像学和电生理检测技术。影像学主要通过mri或者ct-mri融合定位,结合立体定向仪确定植入靶点的空间坐标从而确定解剖靶点。电生理记录通过记录针道途经核团的放电情况从而间接地反映生理靶点。
3.目前,影像学设备和电生理设备一般是由不同的厂家生产的,结合使用存在困难,且不同疾病人群不同靶点的植入解剖路径和靶点电生理特征均不一,现有设备难以全面覆盖,使得目前难以保证不同疾病人群在临床dbs术中的精准定位。
技术实现要素:
4.为了解决上述问题,本技术实施例提供了一种脑深部电极自动植入系统。
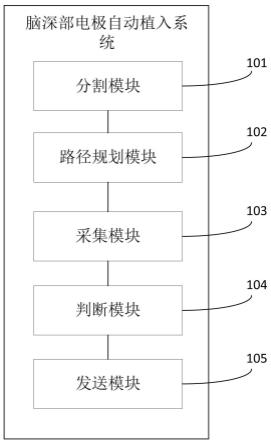
5.第一方面,本技术实施例提供了一种脑深部电极自动植入系统,所述系统包括:分割模块,用于获取目标对象的多模态影像,基于预设的疾病数据库对所述多模态影像进行分割,确定脑血管与靶向核团;路径规划模块,用于基于所述脑血管和靶向核团,确定电极植入靶点的植入位置,并生成所述植入位置对应的目标手术路径;采集模块,用于在手术过程中,基于所述目标手术路径控制电极移动,并基于所述电极采集所述目标对象的神经信号;判断模块,用于在所述目标手术路径上显示所述电极的实时位置,并结合所述神经信号与实时位置判断所述电极是否进入靶向核团区域;发送模块,用于在所述电极进入靶向核团区域时,生成提示信息。
6.优选的,所述分割模块包括:第一获取单元,用于获取目标对象的多模态影像;第二获取单元,用于获取所述目标对象的疾病种类,并基于所述疾病种类在预设
的疾病数据库中选取目标神经网络模型;分割单元,用于基于所述目标神经网络模型对所述多模态影像进行分割,确定脑血管与靶向核团。
7.优选的,所述分割模块还包括:第一训练单元,用于基于所述疾病种类获取无标注图像,并基于所述无标注图像预训练初始模型,得到预训练模型;第二训练单元,用于获取所述疾病种类对应的标注图像,基于所述标注图像训练并校正所述预训练模型,得到神经网络模型;基于各所述疾病种类对应的各所述神经网络模型构建疾病数据库。
8.优选的,所述分割单元包括:导入元件,用于将所述多模态影像导入所述目标神经网络模型,得到标注有图谱标签的输出图像;分割元件,用于根据所述图谱标签分割所述输出图像,确定脑血管与靶向核团。
9.优选的,所述路径规划模块包括:第一确定单元,用于基于所述靶向核团确定电极植入靶点的植入位置;第一生成单元,用于生成所述植入位置对应的目标手术路径,使所述目标手术路径避开各所述脑血管,并且到达所述植入位置。
10.优选的,所述第一生成单元包括:第一生成元件,用于生成所述植入位置对应的至少一个目标手术路径,使所述目标手术路径避开各所述脑血管,并且到达所述植入位置,所述目标手术路径的总长度小于预设长度;展示元件,用于展示所述目标手术路径;第一接收元件,用于接收选择指令,并将所述选择指令对应的所述目标手术路径作为最终实施路径。
11.优选的,所述第一生成单元还包括:第二接收元件,用于接收调整指令,并基于所述调整指令修改所述最终实施路径。
12.优选的,所述发送模块包括:判断单元,用于当所述神经信号变化至目标信号范围,且所述实时位置处于靶向核团区域时,判定所述电极进入靶向核团区域,生成提示信息。
13.优选的,所述系统还包括:接收模块,用于接收风险区域划分指令,确定所述目标手术路径对应的风险区域;设置模块,用于在所述风险区域中设置至少两条备选路径段;更换模块,用于当所述神经信号在预设时间内的变化幅值超过预设幅值时,基于任一所述备选路径段调整剩余的所述目标手术路径。
14.本发明的有益效果为:通过多模态影像与电生理结合的方式,在术前规划出电极的植入路径,并在术中持续判断确定电极的实时位置,以保证电极准确植入,精准度高。
附图说明
15.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例中所需使用的附
图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1为本技术实施例提供的一种脑深部电极自动植入系统的结构示意图。
具体实施方式
17.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。
18.在下述介绍中,术语“第一”、“第二”仅为用于描述的目的,而不能理解为指示或暗示相对重要性。下述介绍提供了本技术的多个实施例,不同实施例之间可以替换或者合并组合,因此本技术也可认为包含所记载的相同和/或不同实施例的所有可能组合。因而,如果一个实施例包含特征a、b、c,另一个实施例包含特征b、d,那么本技术也应视为包括含有a、b、c、d的一个或多个所有其他可能的组合的实施例,尽管该实施例可能并未在以下内容中有明确的文字记载。
19.下面的描述提供了示例,并且不对权利要求书中阐述的范围、适用性或示例进行限制。可以在不脱离本技术内容的范围的情况下,对描述的元素的功能和布置做出改变。各个示例可以适当省略、替代或添加各种过程或组件。例如所描述的方法可以以所描述的顺序不同的顺序来执行,并且可以添加、省略或组合各种步骤。此外,可以将关于一些示例描述的特征组合到其他示例中。
20.参见图1,图1是本技术实施例提供的一种脑深部电极自动植入系统的结构示意图。在本技术实施例中,所述系统包括:分割模块101,用于获取目标对象的多模态影像,基于预设的疾病数据库对所述多模态影像进行分割,确定脑血管与靶向核团;路径规划模块102,用于基于所述脑血管和靶向核团,确定电极植入靶点的植入位置,并生成所述植入位置对应的目标手术路径;采集模块103,用于在手术过程中,基于所述目标手术路径控制电极移动,并基于所述电极采集所述目标对象的神经信号;判断模块104,用于在所述目标手术路径上显示所述电极的实时位置,并结合所述神经信号与实时位置判断所述电极是否进入靶向核团区域;发送模块105,用于在所述电极进入靶向核团区域时,生成提示信息。
21.在本技术实施例中,对于要进行手术的目标对象,将通过核磁共振影像等方式来获取其对应的多模态影像,并从预设的疾病数据库中确定该多模态影像的分割方式,并对其进行分割,以区分确定其中的脑血管和靶向核团。靶向核团便是最终需要植入电极的位置,分割后便能够确定电极植入靶点的植入位置,进而根据该植入位置来生成目标手术路径,即电极的手术植入路径。由于影像方式所确定的位置是一个范围,无法完全的准确,故还会在手术过程中,持续获取电极所采集到的神经信号,根据神经信号的变化结合电极的实时位置来进一步准确判断电极是否进入了靶向核团区域。在确定电极真的进入靶向核团区域后,便会生成提示信息以对手术医生进行提醒。其中,控制电极按照路线移动的过程,可以通过机械传送单元实现,机械传送单元能够在系统的控制下带动颅骨穿刺单元对患者的头皮、颅骨、硬膜实施切开、钻孔等穿刺操作。
22.在一种可实施方式中,所述分割模块101包括:第一获取单元,用于获取目标对象的多模态影像;第二获取单元,用于获取所述目标对象的疾病种类,并基于所述疾病种类在预设的疾病数据库中选取目标神经网络模型;分割单元,用于基于所述目标神经网络模型对所述多模态影像进行分割,确定脑血管与靶向核团。
23.在本技术实施例中,不同疾病对应的靶向核团可能具有特定的电生理特征与影像学特征,不同核团之间可能存在明显差异性。因此,针对单一核团开发的智能定位方法对于其他核团可能不具备普适性。为此,针对不同疾病,在疾病数据库中设置有不同的神经网络模型。实际情况中,将会获取目标对象的疾病种类,以此来选择对应的目标神经网络模型,最终通过该模型实现多模态影像的分割。
24.其中,疾病数据库中的疾病种类可以包括:治疗运动型障碍疾病的靶点丘脑底核(stn),苍白球内侧部(gpi),丘脑腹中间内侧核(vim);治疗药物难治性癫痫的靶点丘脑前核(atn),治疗精神疾病的靶点伏隔核,治疗最小意识状态的靶点中央中核-束旁核复合体。
25.在一种可实施方式中,所述分割模块101还包括:第一训练单元,用于基于所述疾病种类获取无标注图像,并基于所述无标注图像预训练初始模型,得到预训练模型;第二训练单元,用于获取所述疾病种类对应的标注图像,基于所述标注图像训练并校正所述预训练模型,得到神经网络模型;基于各所述疾病种类对应的各所述神经网络模型构建疾病数据库。
26.在本技术实施例中,为了训练模型,将搭建半监督深度学习框架,利用大量无标注图像进行模型预训练,再利用标注的数据集进行模型校正完成脑血管分割模型的训练。最终的目的将是通过模型实现对图像的标注,即采用深度学习模型实现图谱配准,通过图谱和多模态脑部影像数据训练深度学习模型,学习图谱到实际图像的映射关系。当模型收敛后,将模型预测的映射关系作用在图谱的标签上,即将图谱标签形变到实际图像上,便能够实现对实际图像大脑核团的区分与标注,进而进行分割。
27.在一种可实施方式中,所述分割单元包括:导入元件,用于将所述多模态影像导入所述目标神经网络模型,得到标注有图谱标签的输出图像;分割元件,用于根据所述图谱标签分割所述输出图像,确定脑血管与靶向核团。
28.在本技术实施例中,通过将多模态影像导入至对应的目标神经网络模型中,便能够得到标注出图谱标签的输出图像,进而能够根据图谱标签的分割,得到脑血管和靶向核团。
29.在一种可实施方式中,所述路径规划模块102包括:第一确定单元,用于基于所述靶向核团确定电极植入靶点的植入位置;第一生成单元,用于生成所述植入位置对应的目标手术路径,使所述目标手术路径避开各所述脑血管,并且到达所述植入位置。
30.在本技术实施例中,确定目标手术路径的目的在于探索多个手术入路与导向电极植入靶点的路径,避开脑血管,降低可能的功能区损伤,最终实现术前手术靶点定位与手术
路径自动规划。
31.在一种可实施方式中,所述第一生成单元包括:第一生成元件,用于生成所述植入位置对应的至少一个目标手术路径,使所述目标手术路径避开各所述脑血管,并且到达所述植入位置,所述目标手术路径的总长度小于预设长度;展示元件,用于展示所述目标手术路径;第一接收元件,用于接收选择指令,并将所述选择指令对应的所述目标手术路径作为最终实施路径。
32.在本技术实施例中,生成的目标手术路径可能有多条,且由于患者自身独有的情况,可能某些位置需要尽可能避免接触,故在生成目标手术路径后,会将其展示,以供医生选择。医生将通过多模态影像融合重建的3d模型选择出最终实施路径。
33.在一种可实施方式中,所述第一生成单元还包括:第二接收元件,用于接收调整指令,并基于所述调整指令修改所述最终实施路径。
34.在本技术实施例中,生成的路径可能并不适合患者的实际情况,医生可以通过调整指令对最终选择的最终实施路径进行进一步的调整。
35.在一种可实施方式中,所述发送模块105包括:判断单元,用于当所述神经信号变化至目标信号范围,且所述实时位置处于靶向核团区域时,判定所述电极进入靶向核团区域,生成提示信息。
36.在本技术实施例中,为保证最后结果的准确,唯有在神经信号变化至靶向核团所对应的目标信号范围,且影像中电极的实时位置处于靶向核团区域之中时,才会判定电极进入了靶向核团区域,进而才会生成提示信息。
37.在一种可实施方式中,所述系统还包括:接收模块,用于接收风险区域划分指令,确定所述目标手术路径对应的风险区域;设置模块,用于在所述风险区域中设置至少两条备选路径段;更换模块,用于当所述神经信号在预设时间内的变化幅值超过预设幅值时,基于任一所述备选路径段调整剩余的所述目标手术路径。
38.在本技术实施例中,医生根据患者自身的实际诊断情况,可以设置有若干风险区域,该风险区域可以代表医生认为该患者神经较为敏感脆弱的区域。对于风险区域,将会提前设置出多条备选路径段。一旦手术过程中检测到神经信号在预设时间内的变化幅值超过预设幅值,则认为此时对患者造成了较大的刺激,为避免情况进一步恶化下去,将会更换穿刺行进方向,即更换备选路径进行移动,以回避此时对刺激有较大应激的位置,提高手术的效果与成功率。
39.本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通进程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储器中,存储器可以包括:闪存盘、只读存储器(read-only memory, rom)、随机存取器(random access memory,ram)、磁盘或光盘等。
40.以上所述者,仅为本公开的示例性实施例,不能以此限定本公开的范围。即但凡依本公开教导所作的等效变化与修饰,皆仍属本公开涵盖的范围内。本领域技术人员在考虑说明书及实践这里的公开后,将容易想到本公开的其实施方案。本技术旨在涵盖本公开的
任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未记载的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的范围和精神由权利要求限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。