技术特征:
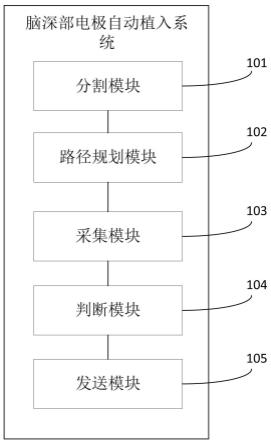
1.一种脑深部电极自动植入系统,其特征在于,所述系统包括:分割模块,用于获取目标对象的多模态影像,基于预设的疾病数据库对所述多模态影像进行分割,确定脑血管与靶向核团;路径规划模块,用于基于所述脑血管和靶向核团,确定电极植入靶点的植入位置,并生成所述植入位置对应的目标手术路径;采集模块,用于在手术过程中,基于所述目标手术路径控制电极移动,并基于所述电极采集所述目标对象的神经信号;判断模块,用于在所述目标手术路径上显示所述电极的实时位置,并结合所述神经信号与实时位置判断所述电极是否进入靶向核团区域;发送模块,用于在所述电极进入靶向核团区域时,生成提示信息。2.根据权利要求1所述的系统,其特征在于,所述分割模块包括:第一获取单元,用于获取目标对象的多模态影像;第二获取单元,用于获取所述目标对象的疾病种类,并基于所述疾病种类在预设的疾病数据库中选取目标神经网络模型;分割单元,用于基于所述目标神经网络模型对所述多模态影像进行分割,确定脑血管与靶向核团。3.根据权利要求2所述的系统,其特征在于,所述分割模块还包括:第一训练单元,用于基于所述疾病种类获取无标注图像,并基于所述无标注图像预训练初始模型,得到预训练模型;第二训练单元,用于获取所述疾病种类对应的标注图像,基于所述标注图像训练并校正所述预训练模型,得到神经网络模型;基于各所述疾病种类对应的各所述神经网络模型构建疾病数据库。4.根据权利要求2所述的系统,其特征在于,所述分割单元包括:导入元件,用于将所述多模态影像导入所述目标神经网络模型,得到标注有图谱标签的输出图像;分割元件,用于根据所述图谱标签分割所述输出图像,确定脑血管与靶向核团。5.根据权利要求1所述的系统,其特征在于,所述路径规划模块包括:第一确定单元,用于基于所述靶向核团确定电极植入靶点的植入位置;第一生成单元,用于生成所述植入位置对应的目标手术路径,使所述目标手术路径避开各所述脑血管,并且到达所述植入位置。6.根据权利要求5所述的系统,其特征在于,所述第一生成单元包括:第一生成元件,用于生成所述植入位置对应的至少一个目标手术路径,使所述目标手术路径避开各所述脑血管,并且到达所述植入位置,所述目标手术路径的总长度小于预设长度;展示元件,用于展示所述目标手术路径;第一接收元件,用于接收选择指令,并将所述选择指令对应的所述目标手术路径作为最终实施路径。7.根据权利要求6所述的系统,其特征在于,所述第一生成单元还包括:第二接收元件,用于接收调整指令,并基于所述调整指令修改所述最终实施路径。
8.根据权利要求1所述的系统,其特征在于,所述发送模块包括:判断单元,用于当所述神经信号变化至目标信号范围,且所述实时位置处于靶向核团区域时,判定所述电极进入靶向核团区域,生成提示信息。9.根据权利要求1所述的系统,其特征在于,所述系统还包括:接收模块,用于接收风险区域划分指令,确定所述目标手术路径对应的风险区域;设置模块,用于在所述风险区域中设置至少两条备选路径段;更换模块,用于当所述神经信号在预设时间内的变化幅值超过预设幅值时,基于任一所述备选路径段调整剩余的所述目标手术路径。
技术总结
本发明公开了一种脑深部电极自动植入系统,系统包括:分割模块,用于获取多模态影像,对多模态影像进行分割,确定脑血管与靶向核团;路径规划模块,用于基于脑血管和靶向核团,确定电极植入靶点的植入位置,并生成目标手术路径;采集模块,用于在手术过程中,基于目标手术路径控制电极移动,并基于电极采集目标对象的神经信号;判断模块,用于在目标手术路径上显示电极的实时位置,并结合神经信号与实时位置判断电极是否进入靶向核团区域;发送模块,用于在电极进入靶向核团区域时,生成提示信息。本申请通过多模态影像与电生理结合,在术前规划出电极的植入路径,并在术中持续判断确定电极的实时位置,以保证电极准确植入,精准度高。度高。度高。
技术研发人员:付朋 姜晓兵 赵洪洋 张方成 蔡晓立 闫鹏飞 易东晔 钱康 饶竞
受保护的技术使用者:华中科技大学同济医学院附属协和医院
技术研发日:2022.10.11
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。