1.本发明涉及打捞装置技术领域,尤其是一种水下细长体重力试验用打捞装置及操作方法。
背景技术:
2.在细长体水下发射试验中,由于绝大部分模型是负浮力,掉落后沉在水池池底,需要在试验后将其打捞回地面。
3.现有技术中,通常采用的打捞方式是全程由人员在水面操作,需完成打捞夹具的装船、下水、对准、夹紧、提升多个环节动作,要多人协同操作,对操作经验要求高,且无法一次性打捞成功,操作时间长,不利于模型设备的安全。
技术实现要素:
4.本技术人针对上述现有生产技术中的缺点,提供一种水下细长体重力试验用打捞装置及操作方法,从而利用重力自锁夹具,用电动装置替代人力,实现了水下细长体试验模型的快速机械化打捞,一次性打捞完成,大大提高了工作效率和安全系数。
5.本发明所采用的技术方案如下:
6.一种水下细长体重力试验用打捞装置,包括夹具,所述夹具的结构为:包括一对对称布置的对夹杆,两个对夹杆通过防脱螺栓连接在一起,组成钳子构型;单个对夹杆的顶面设置有辅助吊环,其中一个对夹杆顶部侧面固定有提升吊环,提升吊环一旁的对夹杆上还安装有配重块,另一个对夹杆的上部安装有滑轮座,所述滑轮座上安装提升缆滑轮,对夹杆的底部安装有抱爪;还包括提升缆,所述提升缆一端固定在提升吊环上,然后穿过提升缆滑轮后与电动葫芦连接,所述辅助吊环上连接有辅助缆。
7.其进一步技术方案在于:
8.所述对夹杆为一体式结构。
9.单个对夹杆的结构为:包括直杆段,所述直杆段的顶部安装辅助吊环,直杆段的底部通过过渡圆弧设置有弯杆部,所述直杆段下部设置有对称的平面,平面处开有安装防脱螺栓的螺栓孔。
10.所述抱爪的结构为:包括抱爪本体,所述抱爪本体呈圆弧状结构,所述抱爪本体上开有多个均匀间隔的通孔,所述抱爪本体的外侧中部设置有定位柱,定位柱与对夹杆底部匹配。
11.所述抱爪本体采用薄板结构。
12.所述通孔为圆形、椭圆形、方形、菱形或长条形。
13.所述配重块为短圆柱体结构。
14.一种水下细长体重力试验用打捞装置的操作方法,包括如下操作步骤:
15.步骤一:准备工作,
16.将夹具、辅助缆、提升缆准备好;
17.步骤二:夹具下水工作,
18.首先:在船上将提升缆穿过提升缆滑轮,和提升吊环连接,辅助吊环上的辅助缆为日常连接的,在船上将缆绳理好;
19.其次:电动葫芦工作,控制提升缆将夹具从船上移至水面上,而后下沉,操作人员将辅助缆理顺跟着夹具同步下水;
20.最后:在水面目视夹具快到达细长体模型上方附近时,将夹具打开,夹具的张开动作由操作人员操作辅助缆来实现,缆一头连接在夹具顶部的辅助吊环上,一头在水面人员手中,通过向上拉拽带有提升缆滑轮的一端,将夹具的重量从提升缆切换到该侧的辅助缆上,此时再拉动有配重块一端的辅助缆,利用配重将该侧的杆子转成接近水平状态;
21.步骤三:对准起吊,
22.首先:夹具对准细长体后,操作电动葫芦慢速靠近水下的细长体,向上拉动有配重块一端的辅助缆,将夹具合拢,细长体在合拢后的抱爪中,随后进行起吊;
23.其次:在电动葫芦起吊过程中,拉力从辅助缆切换到提升缆上,对夹杆上端两头被提升缆拉近,下端两头也相应靠近,最后通过抱爪抱住细长体;随后继续慢速起吊提升缆;
24.然后:夹具夹紧细长体离开池底后,操作电动葫芦快速起吊;细长体随着夹具最终升至水面,完成细长体水下模型的水下起吊工作;
25.最后:到达水面可操作高度后,将细长体连接至另一个行车挂具上,此时夹具可以从模型上脱开放置回水面工作船上。
26.本发明的有益效果如下:
27.本发明结构紧凑、合理,操作方便,利用了重力自锁原理实现了机械化作业,解决了以往纯人力打捞水下细长体模型费时费力的问题,将多个人员操作岗位精简为一人便可操作,大幅简化了试验流程,提高了工作效率。
28.本发明所述的抱爪部件可更换大小以打捞不同尺寸的细长体模型,且配重块可配套更换。
29.本发明不仅实现了水下细长体模型的机械化打捞,而且拓展性较强,使用灵活方便。
附图说明
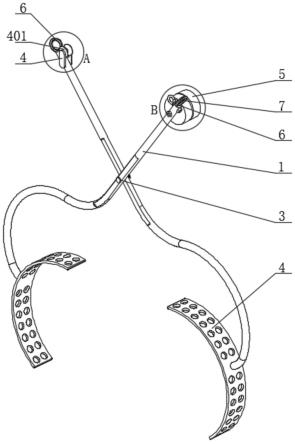
30.图1为本发明的结构示意图。
31.图2为图1中a部的局部放大图。
32.图3为图1中b部的局部放大图。
33.图4为本发明对夹杆的结构示意图。
34.图5为本发明抱爪的结构示意图。
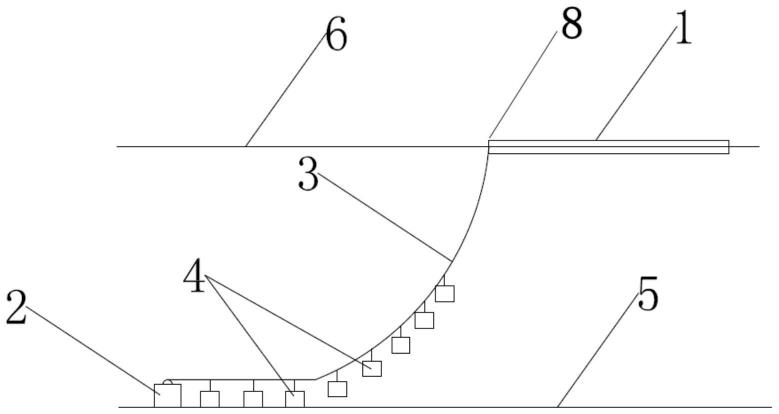
35.图6为本发明在工作状态时的示意图。
36.其中:1、对夹杆;2、抱爪;3、防脱螺栓;4、滑轮座;401、提升缆滑轮;5、配重块;6、辅助吊环;7、提升吊环;8、电动葫芦;9、提升缆;10、辅助缆;11、水面工作船;
37.101、直杆段;102、平面;103、螺栓孔;104、弯杆部;
38.201、抱爪本体;202、通孔;203、定位柱。
具体实施方式
39.下面结合附图,说明本发明的具体实施方式。
40.如图1-图6所示,本实施例的水下细长体重力试验用打捞装置,包括夹具,夹具的结构为:包括一对对称布置的对夹杆1,两个对夹杆1通过防脱螺栓3连接在一起,组成钳子构型;单个对夹杆1的顶面设置有辅助吊环6,其中一个对夹杆1顶部侧面固定有提升吊环7,提升吊环7一旁的对夹杆1上还安装有配重块5,另一个对夹杆1的上部安装有滑轮座4,滑轮座4上安装提升缆滑轮401,对夹杆1的底部安装有抱爪2;还包括提升缆9,提升缆9一端固定在提升吊环7上,然后穿过提升缆滑轮401后与电动葫芦8连接,辅助吊环6上连接有辅助缆10。
41.对夹杆1为一体式结构。
42.单个对夹杆1的结构为:包括直杆段101,直杆段101的顶部安装辅助吊环6,直杆段101的底部通过过渡圆弧设置有弯杆部104,直杆段101下部设置有对称的平面102,平面102处开有安装防脱螺栓3的螺栓孔103。
43.抱爪2的结构为:包括抱爪本体201,抱爪本体201呈圆弧状结构,抱爪本体201上开有多个均匀间隔的通孔202,抱爪本体201的外侧中部设置有定位柱203,定位柱203与对夹杆1底部匹配。
44.抱爪本体201采用薄板结构。
45.通孔202为圆形、椭圆形、方形、菱形或长条形。
46.配重块5为短圆柱体结构。
47.本实施例的水下细长体重力试验用打捞装置的操作方法,包括如下操作步骤:
48.步骤一:准备工作,
49.将夹具、辅助缆10、提升缆9准备好;
50.步骤二:夹具下水工作,
51.首先:在船上将提升缆9穿过提升缆滑轮401,和提升吊环7连接,辅助吊环6上的辅助缆10为日常连接的,在船上将缆绳理好;
52.其次:电动葫芦8工作,控制提升缆9将夹具从船上移至水面上,而后下沉,操作人员将辅助缆10理顺跟着夹具同步下水;
53.最后:在水面目视夹具快到达细长体模型上方附近时,将夹具打开,夹具的张开动作由操作人员操作辅助缆10来实现,缆一头连接在夹具顶部的辅助吊环6上,一头在水面人员手中,通过向上拉拽带有提升缆滑轮401的一端,将夹具的重量从提升缆9切换到该侧的辅助缆10上,此时再拉动有配重块5一端的辅助缆10,利用配重将该侧的杆子转成接近水平状态;
54.步骤三:对准起吊,
55.首先:夹具对准细长体后,操作电动葫芦8慢速靠近水下的细长体,向上拉动有配重块5一端的辅助缆10,将夹具合拢,细长体在合拢后的抱爪2中,随后进行起吊;
56.其次:在电动葫芦8起吊过程中,拉力从辅助缆10切换到提升缆9上,对夹杆1上端两头被提升缆9拉近,下端两头也相应靠近,最后通过抱爪2抱住细长体;随后继续慢速起吊提升缆9;
57.然后:夹具夹紧细长体离开池底后,操作电动葫芦8快速起吊;细长体随着夹具最
终升至水面,完成细长体水下模型的水下起吊工作;
58.最后:到达水面可操作高度后,将细长体连接至另一个行车挂具上,此时夹具可以从模型上脱开放置回水面工作船11上。
59.本发明的具体结构和功能如下:
60.主要包括对夹杆1、抱爪2、提升缆滑轮401、配重块5、辅助吊环6、提升吊环7。
61.外部依赖的装置包括水池配套的电动葫芦8、提升缆9、辅助缆10以及水面工作船11。
62.本发明的主体部件是对夹杆1,由防脱螺栓3穿过螺栓孔103将两个对夹杆1连接在一起,组成钳子的构型。夹具由提升缆9吊装上下,绳一头连接在提升吊环7,穿过提升缆滑轮401后连接到电动葫芦8,电动葫芦8实现夹具整体上下移动。
63.实际工作过程中:
64.(一)夹具下水:
65.首先:在船上将提升缆9穿过提升缆滑轮401,和提升吊环7连接,辅助吊环6上的辅助缆10为日常连接的,只需在船上将缆绳理好。
66.其次:电动葫芦8工作,控制提升缆9将夹具从船上移至水面上,而后下沉,人员将辅助缆10理顺跟着夹具同步下水;
67.最后:在水面目视夹具快到达细长体模型上方附近时,将夹具打开,夹具的张开由人操作辅助缆10来实现,缆一头连接在夹具顶部的吊环上,一头在水面人员手中。通过向上拉拽带有提升缆滑轮401的一端,将夹具的重量从提升缆9切换到该侧的辅助缆10上,此时再拉动有配重块5一端的辅助缆10,利用配重将该侧的杆子转成接近水平状态;
68.(二)对准起吊:
69.首先:夹具对准细长体后,操作电动葫芦8电动慢速靠近水下的细长体。向上拉动有配重块5一端的辅助缆10,将夹子合拢,模型在合拢后的抱爪2中,随后进行起吊。状态如图6所示。
70.其次:电动起吊,在电动葫芦8起吊过程中,拉力从辅助缆10切换到提升缆9上,对夹杆1上端两头被提升缆9拉近,下端两头也相应靠近,最后通过抱爪2抱住细长体模型。随后继续慢速起吊提升缆9。由本发明的结构形式,提升离开池底面过程中,细长体模型在夹具上的力越来越大,同时被抱得越来越紧。
71.然后:夹具夹紧模型离开池底后,操作电动葫芦8电动快速起吊。模型随着夹具最终升至水面,完成细长体水下模型的水下起吊。
72.最后:到达水面可操作高度后,将模型连接至另一个行车挂具上,此时夹具可以从模型上脱开放置回工作船上。至此,已完成整个模型的打捞过程。后续切换至模型水面起吊、出水池的流程。
73.本发明借鉴重力自锁夹具的原理,设计了机械化的模型打捞夹具,以往的打捞工具,要在船上靠人力将夹具拉紧、缓慢提拉至水面,操作复杂,对人员的经验要求较高。本方法中,利用水面行车提升夹具的同时将细长体模型牢固的夹紧,可以稳定的将模型从池底提拉至水面,形成了基于该装置的打捞方法,节省了岗位和工时,大幅减少了模型在水下危险环境的驻留时间,提高了模型安全性和试验工作效率。
74.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利
要求,在本发明的保护范围之内,可以作任何形式的修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。