1.本实用新型涉及风电塔筒清洗技术领域,特别涉及一种风电塔筒清洗机器人。
背景技术:
2.风电塔筒为风力发电设备的主要支撑装备,塔筒经多年运行表面需要清洗维护,尤其是风力发电设备产生故障导致润滑油和齿轮箱油泄漏时,会严重污染塔筒外表面。目前塔筒的清洗和维护工作仍然采用传统的人工作业方式——“蜘蛛人”,这种工作方法存在巨大安全隐患,且劳动强度大、施工周期长、成本高。
3.使用清洗机器人代替手工作业尤为迫切,目前塔筒清洗机器人结构较为复杂,曲面适应能力差,作业过程中需要爬行至塔筒顶端,存在一定的危险性。
4.使用小型爬壁机器人效率低,短时间很难完成整个塔筒大面积的清理作业,且容易造成清理遗漏。大型清洗设备在清洗某一角度的污渍时,又会产生不必要的浪费,且设备庞大,现场操作困难。
技术实现要素:
5.本实用新型的目的在于提供一种风电塔筒清洗机器人,利用该机器人能够对风电塔筒的外壁进行清洗,机器人的控制难度低,方便野外现场作业,结构简单,故障率低。
6.为了实现上述目的,本实用新型提供如下技术方案:
7.一种风电塔筒清洗机器人,包括支撑挂架、支撑轮、永磁间隙吸附模块、清洗模块和升降机,其中,所述支撑轮与所述支撑挂架连接,所述支撑轮用于支撑所述支撑挂架,所述升降机与所述支撑挂架连接,所述升降机带动所述支撑挂架通过所述支撑轮在所述塔筒的外壁上移动;所述永磁间隙吸附模块设置在所述支撑挂架和/或所述支撑轮上,所述永磁间隙吸附模块为所述机器人提供吸附到所述塔筒的外壁的吸附力;所述清洗模块设置在所述支撑挂架上,所述清洗模块能够对所述塔筒的外壁进行清理。
8.进一步地,在上述的一种风电塔筒清洗机器人中,所述升降机具有拉绳,所述升降机通过所述拉绳带动所述支撑挂架在所述塔筒的外壁升降;所述升降机设置在所述塔筒的顶部,所述拉绳的一端与所述升降机连接,所述拉绳的另一端与所述支撑挂架连接,或,所述升降机设置在地面上,所述塔筒的顶部设置有滑轮,所述拉绳的一端与所述升降机连接,所述拉绳的另一端穿过所述滑轮后与所述支撑挂架连接;所述升降机为电动葫芦、卷扬机和绞盘中的一种,所述升降机的运行方式为气动、液压和电动驱动中的一种。
9.进一步地,在上述的一种风电塔筒清洗机器人中,所述支撑挂架为框架结构,所述支撑挂架包括第一横杆、第二横杆和两根纵杆,所述第一横杆、一根所述纵杆、所述第二横杆和另一根所述纵杆依次连接;所述支撑挂架上覆盖有防护罩。
10.进一步地,在上述的一种风电塔筒清洗机器人中,所述支撑轮包括支撑臂、转动轴和转动轮,所述支撑臂的一端与所述支撑挂架连接,所述转动轴穿过所述支撑臂的另一端的端部,所述转动轴的两端分别转动连接有所述转动轮。
11.进一步地,在上述的一种风电塔筒清洗机器人中,所述第一横杆上固定连接有两个所述支撑轮;两根所述纵杆分别与一个所述支撑轮铰接,或,所述第二横杆与一个所述支撑轮铰接;与所述支撑挂架铰接的所述支撑轮的支撑臂上设置有弹簧,所述弹簧的拉力能够调节所述第二横杆与所述塔筒的表面之间的距离。
12.进一步地,在上述的一种风电塔筒清洗机器人中,所述永磁间隙吸附模块包括第一吸附体,每个所述支撑轮上设置有一个所述第一吸附体,所述第一吸附体包括轭铁和磁铁,所述轭铁为梯台结构,所述磁铁为长方体结构,所述轭铁的底面与所述支撑臂的另一端连接,所述磁铁设置有三个,三个所述磁铁分别设置在所述轭铁的顶面以及两个侧表面上;三个所述磁铁最外端所形成的弧线的半径小于所述转动轮的半径,三个所述磁铁最外端所形成的弧线角度为90
°
~180
°
。
13.进一步地,在上述的一种风电塔筒清洗机器人中,所述永磁间隙吸附模块包括第二吸附体;所述第二吸附体在所述支撑挂架上的布置形式为哈尔巴赫阵列型或者变磁化方向单元组合型中的一种。
14.进一步地,在上述的一种风电塔筒清洗机器人中,所述清洗模块包括多个第一清洗单元,所述第一清洗单元包括滚刷和第一驱动电机,所述滚刷的驱动轴的两端分别与两根所述纵杆连接,所述第一驱动电机固定安装在一根所述纵杆上,所述第一驱动电机的输出端与所述滚刷的驱动轴的一端连接,所述第一驱动电机能够通过所述驱动轴驱动所述滚刷旋转;所述第一清洗单元设置有1~3个,当所述第一清洗单元设置为多个时,相邻的两个所述第一清洗单元的所述滚刷的旋转方向相反。
15.进一步地,在上述的一种风电塔筒清洗机器人中,所述清洗模块包括第二清洗单元,所述第二清洗单元设置在所述支撑挂架内,所述第二清洗单元包括盘刷、调节臂和第二驱动电机,所述调节臂的一端与所述支撑挂架连接,所述盘刷设置在所述调节臂的另一端,所述第二驱动电机的输出端与所述盘刷转动连接,所述第二驱动电机能够驱动所述盘刷旋转,所述调节臂能够对所述盘刷的高度进行调节;所述第二清洗单元设置有2~5个,相邻的两个所述第二清洗单元的所述盘刷的旋转方向相反。
16.进一步地,在上述的一种风电塔筒清洗机器人中,所述调节臂包括机架杆、底座、第一摇杆和第二摇杆,所述机架杆设置在所述支撑挂架上,所述第一摇杆的两端分别与所述底座和所述机架杆铰接,所述第二摇杆的两端分别与所述底座和所述机架杆铰接,所述第一摇杆和所述第二摇杆长度相等,所述第一摇杆和所述第二摇杆平行设置,所述盘刷安装在所述底座上;所述底座与所述机架杆之间设置有弹簧,所述弹簧能够调节所述第一摇杆和所述机架杆之间的角度,所述弹簧能够调节所述第二摇杆与所述机架杆之间的角度。
17.分析可知,本实用新型公开一种风电塔筒清洗机器人,包括支撑挂架、支撑轮、永磁间隙吸附模块、清洗模块和升降机,该机器人采用永磁间隙吸附技术,保证机器人能够吸附在塔筒表面。通过升降机的驱动方式,减少了机器人的控制难度,方便野外现场作业,结构简单,故障率低。清洗液喷头向塔筒外壁喷洒清洗液后,利用清洗模块能够对筒的外壁进行高效的清洗。支撑轮和第二清洗单元上的弹簧设计可以使清洗模块与塔筒外壁面有效接触,保证清洗模块的清洗效果。
附图说明
18.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。其中:
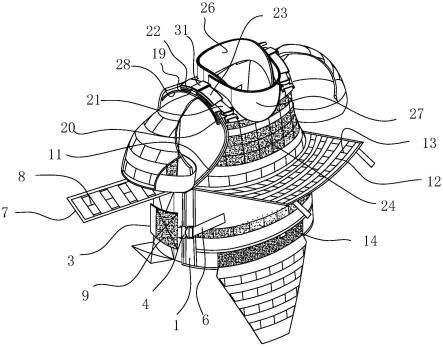
19.图1本实用新型一实施例在工作时的结构示意图。
20.图2本实用新型另一实施例在工作时的结构示意图。
21.图3本实用新型一实施例的立体结构示意图。
22.图4本实用新型一实施例的没有安装防护罩时的立体结构示意图。
23.图5本实用新型另一实施例的立体结构示意图。
24.图6本实用新型另一实施例的安装有一个第一清洗单元的立体结构示意图。
25.图7本实用新型一实施例的支撑轮的立体结构示意图。
26.图8本实用新型一实施例的安装有两个第一清洗单元的结构示意图。
27.图9本实用新型一实施例的永磁间隙吸附模块的布置示意图。
28.图10本实用新型一实施例的清洗模块的布置示意图。
29.附图标记说明:1支撑挂架;10第一横杆;11第二横杆;12纵杆;13 防护罩;2支撑轮;20支撑臂;21转动轴;22转动轮;3永磁间隙吸附模块; 30第一吸附体;300轭铁;301磁铁;31第二吸附体;4清洗模块;40第一清洗单元;401滚刷;402第一驱动电机;41第二清洗单元;410盘刷;411 调节臂;412机架杆;413底座;414第一摇杆;415第二摇杆;416第二驱动电机;5升降机;50拉绳;51滑轮;6弹簧;7塔筒。
具体实施方式
30.下面将参考附图并结合实施例来详细说明本实用新型。各个示例通过本实用新型的解释的方式提供而非限制本实用新型。实际上,本领域的技术人员将清楚,在不脱离本实用新型的范围或精神的情况下,可在本实用新型中进行修改和变型。例如,示为或描述为一个实施例的一部分的特征可用于另一个实施例,以产生又一个实施例。因此,所期望的是,本实用新型包含归入所附权利要求及其等同物的范围内的此类修改和变型。
31.在本实用新型的描述中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型而不是要求本实用新型必须以特定的方位构造和操作,因此不能理解为对本实用新型的限制。本实用新型中使用的术语“相连”、“连接”、“设置”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是直接相连,也可以通过中间部件间接相连;可以是有线电连接、无线电连接,也可以是无线通信信号连接,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
32.所附附图中示出了本实用新型的一个或多个示例。详细描述使用了数字和字母标记来指代附图中的特征。附图和描述中的相似或类似标记的已经用于指代本实用新型的相似或类似的部分。如本文所用的那样,用语“第一”、“第二”和“第三”等可互换地使用,以将一个构件与另一个区分开,且不旨在表示单独构件的位置或重要性。
33.如图1至图10所示,根据本实用新型的实施例,提供了一种风电塔筒清洗机器人,包括支撑挂架1、支撑轮2、永磁间隙吸附模块3、清洗模块4和升降机5,其中,支撑轮2与支撑
挂架1连接,支撑轮2用于支撑支撑挂架1,升降机5与支撑挂架1连接,升降机5带动支撑挂架1通过支撑轮2在塔筒 7的外壁上移动;永磁间隙吸附模块3设置在支撑挂架1和/或支撑轮2上,永磁间隙吸附模块3为机器人提供吸附到塔筒7的外壁的吸附力;清洗模块 4设置在支撑挂架1上,清洗模块4能够对塔筒7的外壁进行清理。该机器人采用永磁间隙吸附技术,保证机器人能够吸附在塔筒7表面。通过升降机 5的驱动方式,减少了机器人的控制难度,方便野外现场作业,结构简单,故障率低。
34.进一步地,如图1和图2所示,升降机5具有拉绳50,升降机5通过拉绳50带动支撑挂架1在塔筒7的外壁升降;升降机5设置在塔筒7的顶部,拉绳50的一端与升降机5连接,拉绳50的另一端与支撑挂架1连接,或,升降机5设置在地面上,塔筒7的顶部设置有滑轮51,拉绳50的一端与升降机5连接,拉绳50的另一端穿过滑轮51后与支撑挂架1连接;升降机5 为电动葫芦、卷扬机和绞盘中的一种,升降机5的运行方式为气动、液压和电动驱动中的一种。该机器人采用钢索牵引作业方式,机器人吸附在塔筒7 外壁面,升降机5设置在风电机舱(塔筒7顶端)或者地面,升降机5可以是电动葫芦、卷扬机或者绞盘,也可以是气动、液压或者电动驱动方式。通过升降机5收放钢索,来控制清洗机器人上升下降。升降机5在塔筒7的顶部的挂载点或滑轮51沿塔筒7的周向设置有若干个,且相邻两个之间的间距小于支撑挂架1的宽度,方便对塔筒7的外壁进行清理,防止造成清理遗漏。
35.进一步地,如图6所示,支撑挂架1为框架结构,支撑挂架1包括第一横杆10、第二横杆11和两根纵杆12,第一横杆10、一根纵杆12、第二横杆 11和另一根纵杆12依次连接;支撑挂架1上覆盖有防护罩13。防护罩13 能够防止清洗液飞溅。
36.进一步地,如图7所示,支撑轮2包括支撑臂20、转动轴21和转动轮 22,支撑臂20的一端与支撑挂架1连接,转动轴21穿过支撑臂20的另一端的端部,转动轴21的两端分别转动连接有转动轮22。支撑轮2通过转动轮 22与塔筒7外壁接触,方便机器人在塔筒7外壁的移动。
37.进一步地,如图4和图6所示,第一横杆10上固定连接有两个支撑轮2;两根纵杆12分别与一个支撑轮2铰接,或,第二横杆11与一个支撑轮2铰接;与支撑挂架1铰接的支撑轮2的支撑臂20上设置有弹簧6,弹簧6的一端与支撑臂20连接,弹簧6的另一端与支撑挂架1连接,弹簧6的拉力能够调节第二横杆11与塔筒7的表面之间的距离。弹簧6的设置可以保证清洗模块4与塔筒7的外壁良好接触。
38.进一步地,永磁间隙吸附模块3采用永磁间隙吸附技术,永磁间隙吸附模块3不与塔筒7外壁直接接触,永磁间隙吸附模块3包括第一吸附体30,如图7所示,每个支撑轮2上设置有一个第一吸附体30,第一吸附体30包括轭铁300和磁铁301,轭铁300为梯台结构,磁铁301为长方体结构,轭铁300的底面与支撑臂20的另一端连接,轭铁300的轴线与转动轮22的转动轴21的轴线垂直,轭铁300的厚度小于两个转动轮22之间的间距,磁铁 301通过螺钉固定在轭铁300上,轭铁300通过螺钉固定在支撑臂20上,磁铁301和轭铁300随支撑臂20一起摆动,磁铁301设置有三个,三个磁铁301分别设置在轭铁300的顶面以及两个侧表面上;三个磁铁301最外端所形成的弧线的半径小于转动轮22的半径,三个磁铁301最外端所形成的弧线角度为90
°
~180
°
,如此设置能够使第一吸附体30不影响转动轮22的转动和支撑臂20的摆动。支撑轮2与塔筒7外壁面接触,支撑轮2上设置第一吸附体30使其具有磁吸附作用,可以保证机器人的清洗模块4与塔筒7外壁面有效接触。
39.进一步地,如图9所示,永磁间隙吸附模块3包括第二吸附体31;第二吸附体31的布置形式为哈尔巴赫阵列型(halbach型)或者变磁化方向单元组合型中的一种,比如:第一横杆10和第二横杆11上分别设置有一个第二吸附体31,或,两个纵杆12上分别设置有一个第二吸附体31,或,两个纵杆12、第一横杆10和第二横杆11分别设置有一个第二吸附体31。
40.通过合理布置永磁间隙吸附模块3的形式、数量和位置,保证机器人在整个作业过程中可靠吸附在塔筒7外表面,不发生滑移、转动和脱落。永磁间隙吸附模块3可以布置在支撑轮2内侧(第一吸附体30),也可以直接布置在支撑框架上(第二吸附体31),永磁间隙吸附模块3的数量根据需要的吸附力确定。如图9所示,比如:仅在支撑轮2设置第一吸附体30,支撑轮 2可以设置3个或4个。或者第一吸附体30和第二吸附体31均布置,安装有第一吸附体30的支撑轮2设置4个,两个纵杆12、第一横杆10和第二横杆11均设置第二吸附体31,也可以仅在第一横杆10和第二横杆11上布置第二吸附体31,也可以在两个纵杆12上布置第二吸附体31。或者永磁间隙吸附模块3以哈尔巴赫阵列型(halbach型)、变磁化方向单元组合型的形式进行布置。
41.进一步地,如图6所示,清洗模块4与塔筒7的外壁接触,清洗模块4 包括多个第一清洗单元40,第一清洗单元40包括滚刷401和第一驱动电机 402,滚刷401的驱动轴的两端分别与两根纵杆12连接,第一驱动电机402 固定安装在一根纵杆12上,第一驱动电机402的输出端与滚刷401的驱动轴的一端连接,第一驱动电机402能够通过驱动轴驱动滚刷401旋转;在本实用新型的一实施例中,第一清洗单元40设置有1~3个,当第一清洗单元40 设置为多个时,相邻的两个第一清洗单元40的滚刷401的旋转方向相反,用以相互抵消反作用力。两个滚刷401的弧度互补,例如,如图8所示,一个滚刷401为φ1~2.5m,另一个为2m~4m,如此设置能够提高滚刷401的清理效果。
42.进一步地,如图4所示,清洗模块4包括第二清洗单元41,第二清洗单元41设置在支撑挂架1内,第二清洗单元41包括盘刷410、调节臂411和第二驱动电机416,调节臂411的一端与支撑挂架1连接,盘刷410设置在调节臂411的另一端,第二驱动电机416的输出端与盘刷410转动连接,第二驱动电机416能够驱动盘刷410旋转,调节臂411能够对盘刷410的高度进行调节,进而调整盘刷410与塔筒7外壁的接触面积;在本实用新型的另一实施例中,第二清洗单元41设置有2~5个,相邻的两个第二清洗单元41 的盘刷410的旋转方向相反,用以相互抵消反作用力;
43.进一步地,如图4所示,调节臂411为双摇杆机构,调节臂411包括机架杆412、底座413、第一摇杆414和第二摇杆415,机架杆412设置在支撑挂架1上,机架杆412与支撑挂架1固定连接,第一摇杆414的两端分别与底座413和机架杆412铰接,第二摇杆415的两端分别与底座413和机架杆 412铰接,第一摇杆414和第二摇杆415形成转动副,第一摇杆414和第二摇杆415长度相等,第一摇杆414和第二摇杆415平行设置,盘刷410安装在底座413上;底座413与机架杆412之间设置有弹簧6,弹簧6能够调节第一摇杆414与机架杆412之间的角度,以及第二摇杆415与机架杆412之间的角度。或者其中第一摇杆414或第二摇杆415可调整长度,用来调整底座413与机架杆412的夹角,进而调整固定在底座413上的盘刷410的仰俯角,进一步的调整盘刷410与塔筒7外壁的接触面积。
44.如图10所示,第一清洗单元40和第二清洗单元41可以通过各种组合方式实现对塔筒7外壁的高效率的清洗,比如:第一清洗单元40在支撑挂架1 内由上至下依次设置1~3
个;或者在支撑挂架1内呈品字形布置3个;或者第二清洗单元41在支撑挂架1内由左到右布置2~3;或者第二清洗单元41 在支撑挂架1内呈品字形布置3~5个;或者在支撑挂架1内布置两排,其中一排布置2个第二清洗单元41,另一排布置1个第一清洗单元40。第一清洗单元40和第二清洗单元41的还可以为其他布置形式。
45.进一步地,还包括清洗液喷头,清洗液喷头设置在塔筒7顶端或者支撑挂架1上,清洗液喷头向塔筒7外壁喷洒清洗液后,由清洗模块4对塔筒7 的外壁进行清洗。
46.该机器人除可以清洗风电塔筒7外,还适用于类似筒形、柱形或平面钢制结构表面的清洗作业,在不安装永磁间隙吸附模块3时,还可以适用于大型玻璃幕墙的清洗作业。
47.从以上的描述中,可以看出,本实用新型上述的实施例实现了如下技术效果:
48.一种风电塔筒清洗机器人,包括支撑挂架1、支撑轮2、永磁间隙吸附模块3、清洗模块4和升降机5,该机器人采用永磁间隙吸附技术,保证机器人能够吸附在塔筒7表面。通过升降机5的驱动方式,减少了机器人的控制难度,方便野外现场作业,结构简单,故障率低。清洗液喷头向塔筒7外壁喷洒清洗液后,利用清洗模块4能够对筒的外壁进行高效的清洗。支撑轮2和第二清洗单元41上的弹簧6设计可以使清洗模块4与塔筒7外壁面有效接触,保证清洗模块4的清洗效果。
49.以上所述仅为本实用新型的优选实施例,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。