1.本发明涉及一种自动数字连续电位器,特别是涉及远程实验的、测试性能要求高的、参数设计实验的自动数字连续电位器。
背景技术:
2.很多教学实验都使用电位器来获得调节的电阻,以实现所设计参数的电路,而远程虚拟实验中如何调节电位器获得想要的电阻是一大难点。数字电位器是一种代替传统机械电位器的新型cmos数字、模拟混合信号处理的集成电路。数字电位器由数字输入控制,产生一个模拟量的输出。依据数字电位器的不同,抽头电流最大值可以从几百微安到几个毫安。然后,数字电位器只能获得离散数值的电阻,不能满足远程虚拟实验要求。
技术实现要素:
4.本发明的目的在于克服上述现有技术中的不足,提出一种自动数字连续电位器。该电位器能够数字控制甚至远程控制,获得连续的电阻值,且输出电阻精度高。
5.本发明的目的可以通过以下技术方案实现:自动数字连续电位器包括:电阻机械模块、阻值给定模块、控制器模块,阻值给定模块提供具有分辨率的阻值给定信号给控制器模块,控制器模块根据阻值给定信号确定给定电阻值,控制器模块从电阻机械模块采集实时电阻值,控制器模块根据控制策略将实时电阻值和给定电阻值的差值控制在设定的误差范围内。
6.所述的阻值给定模块,包括:输入方波信号、方波转电压子模块、输入电压信号、阻值给定信号,输入方波信号经方波转电压子模块后变为输入电压信号,输入电压信号作为阻值给定信号;阻值给定模块也能够不经过输入方波信号、方波转电压子模块,直接将输入电压信号作为阻值给定信号;输入方波信号的分辨率为方波占空比;输入电压信号的分辨率为直流电压值。
7.进一步地,所述的阻值给定模块,包括:输入方波信号、方波转电压子模块、输入电压信号、阻值给定信号,输入方波信号的幅值为5v,占空比为0时对应阻值为0,占空比100%时对应阻值满量程;输入电压信号为0-5v直流电压, 0v对应阻值为0,5v对应阻值满量程。
8.所述的电阻机械模块,包括:反馈电位器、传动电机、调变电位器,其特征是,传动电机与调变电位器连接在一起,反馈电位器与调变电位器输出阻值一一对应;反馈电位器用来获取调变电位器的输出阻值信息,输入到控制器模块中,控制器模块控制传动电机改变调变电位器的中间端子位置。
9.所述的电阻机械模块,包括:反馈电位器、传动电机、调变电位器,其特征是,调变电位器、传动电机、反馈电位器通过齿轮连接,调变电位器和反馈电位器的旋转方向始终一致;反馈电位器与调变电位器相同的满量程位移量、中间端子所在位置同步。
10.反馈电位器选择与调变电位器同型号、同阻值量程、中间端子位置同步。
11.所述的电阻机械模块,包括:反馈电位器、传动电机、调变电位器,其特征是,调变
电位器有三个输出端子:两个两端端子(端子1、端子2)、中间端子,两个两端端子之间的电阻值不变,接入模式为:两端输出和三端输出,两端输出为:两端端子其中之一(端子1或端子2)、中间端子;三端输出时,中间端子与两端端子(端子1、端子2)之间的电阻比例变化。
12.所述的电阻机械模块,包括:反馈电位器、传动电机、调变电位器,其特征是,误差标定过程:预先测定反馈电位器与调变电位器输出电阻的全量程误差进行给定值校准。
13.反馈电位器的测量方法是两个两端端子(端子1、端子2)之间加入电压u1,测量中间端子与两端端子中的其中任一个端子之间的电压。
14.控制器模块控制策略的设计思想为:避免太过频率调整电阻值,因为在改变阻值给定信号的过程中,阻值给定信号非常不稳定。
15.所述的控制器模块中的控制策略,第一步,从阻值给定模块中检测阻值给定信号,至少检测两次阻值给定信号,且每一次检测后设定时间间隔;第二步,给定信号稳定判断,对第一步检测的阻值给定信号做差值处理,判断给定信号是否稳定;如果给定信号稳定判断为是,阻值给定信号转化为给定电阻值,则进入第三步;如果给定信号稳定判断为否,则返回到第一步重新开始;第三步,控制器模块采集实时电阻值,也就是反馈电位器的电阻值;第四步,给定差值幅度判断,给定阻值与反馈电位器采集阻值的差值是否大于给定幅度值;如果给定差值幅度判断为是,则进入第五步;如果给定差值幅度判断为否,则返回到第一步重新开始;第五步,电阻调节程序;第六步,采集实时电阻值,给定电阻值与实时电阻值的差值是否大于误差设定值;如果误差设定值判断为是,则返回第五步的电阻调节程序;如果误差设定值为否,则进入第一步重新开始。
16.所述的控制器模块中的控制策略,第五步的电阻调节程序采用分段控制算法:大差值控制算法和小差值控制算法,每一个循环周期采集反馈电位器的实时电阻值,给定电阻值与实时电阻值的差值大于算法设定值,则大差值控制算法对传动电机输出控制信号;给定电阻值与实时电阻值的差值小于算法设定值,则小差值控制算法对传动电机输出控制信号。
17.所述的控制器模块中的控制策略,第五步的电阻调节程序采用分段控制算法:大差值控制算法和小差值控制算法,小差值控制算法的时间积分常量比大差值控制算法大。
18.与现有技术相比,本发明的有益效果是:第一、数字控制的连续电位器;第二、数字连续电位器的精度高、控制响应快速;第三、数字连续电位器不影响其使用电路;第四、只需要给定方波或直流电压,就能够自动调节到相应电阻值,使用简单、方便。
附图说明
19.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
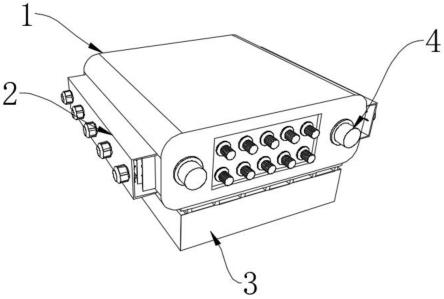
20.图1为自动数字连续电位器结构示意图;
21.图2为控制器模块中的控制策略示意图。
具体实施方式
22.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的
范围。
23.请参阅图1-图2所示,自动数字连续电位器,包括电阻机械模块、阻值给定模块及控制器模块,阻值给定模块提供具有分辨率的阻值给定信号给控制器模块,控制器模块根据阻值给定信号确定目标电阻值,控制器模块从电阻机械模块采集实时电阻值,控制器模块根据控制策略将实时电阻值和目标电阻值的差值控制在设定的误差范围内。
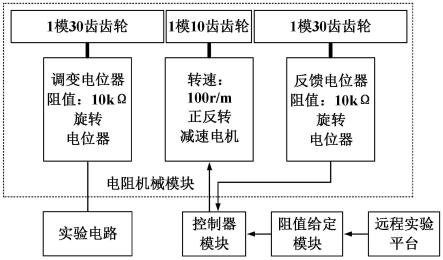
24.电阻机械模块包括调变电位器、传动电机、反馈电位器;调变电位器、传动电机、反馈电位器通过齿轮连接,调变电位器采用阻值为10kω满量程10圈的旋转电位器,调变电位器控制中间端子位置的旋转轴上连接1模30齿齿轮a;传动电机采用额定转速:100r/m、额定电压6v的正反转减速电机,传动电机的旋转轴上连接1模10齿齿轮b;反馈电位器采用与调变电位器同型号、同阻值 10kω满量程10圈、中间端子所在位置同步的旋转电位器,反馈电位器控制中间端子位置的旋转轴上连接1模30齿齿轮c;反馈电位器还能够采用与调变电位器相同满量程位移量10圈、中间端子所在位置同步的旋转电位器,阻值满量程为20kω、50kω、100kω等;反馈电位器阻值测量方法是在两端端子1、端子2之间加入电压u1,测量中间端子与两端端子中的其中任一个端子之间的电压u2;齿轮a、齿轮b、齿轮c同步耦合。
25.如图1所示,调变电位器接入到实验电路中;远程实验平台发送一个5v幅值的方波或者0v-5v的直流电压给阻值给定模块,阻值给定模块输入到控制器模块,同时控制器模块采集反馈电位器的阻值,根据控制策略去控制传动电机。
26.如图2所示,控制器模块中的控制策略,控制策略的设计思想为:避免太过频率调整电阻值,因为在改变阻值给定信号的过程中,阻值给定信号非常不稳定。第一步,从阻值给定模块中检测阻值给定信号,至少检测两次阻值给定信号,且每一次检测后设定时间间隔,两次中间间隔0.5s;第二步,给定信号稳定判断,对第一步检测的阻值给定信号做差值处理,判断给定信号是否稳定,这里设定每一次检测的阻值给定信号偏差小于千分之五;如果给定信号稳定判断为是,阻值给定信号转化为给定阻值,则进入第三步;如果给定信号稳定判断为否,则返回到第一步重新开始;第三步,控制器模块采集实时电阻值,也就是反馈电位器的电阻值;第四步,为避免给定侧扰动被当成给定值,给定差值幅度判断,给定阻值与反馈电位器采集阻值的差值是否大于给定幅度值;如果给定差值幅度判断为是,则进入第五步;如果给定差值幅度判断为否,则返回到第一步重新开始;第五步,电阻调节程序采用分段控制算法,每一个循环周期采集反馈电位器的实时电阻值,确定给定阻值,给定阻值与实时电阻值的差值大于算法设定值,则大差值控制算法对传动电机输出控制信号;给定阻值与实时电阻值的差值小于算法设定值,则小差值控制算法对传动电机输出控制信号;第六步,采集实时电阻值,给定阻值与实时电阻值的差值是否大于误差设定值;如果误差设定值判断为是,则返回第五步的电阻调节程序;如果误差设定值为否,则进入第一步重新开始。
27.分段控制算法采用分段pid控制算法,如果差值大于满量程百分之五,则 pid参数为:8、0.5、0;如果差值小于满量程百分之五,则pid参数为:20、5、 0;因为传动电机本身的启动电流较大,小差值控制算法的时间积分常量比大差值控制算法大,最优为5-15倍。
28.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原
理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。