1.本发明涉及一种面要素采集方法,具体涉及一种基于曲线拟合和内插的面要素采集方法。
背景技术:
2.随着社会经济和科学技术的进步,计算机技术得到了普遍的应用;其中地理信息技术也随着计算机技术的不断发展,地理信息系统geographic information system,(gis)的应用越来越广泛,形式也越来越多样,地理信息数据的现势性要求也越来越高,而gis所需的底层矢量数据,主要来源于基础地理信息的地表覆盖面要素数据,这就需要有更快更高效的地表覆盖面要素数据采集方法,以满足急速增长的地理信息数据的需求。
3.近些年遥感影像的智能解译虽然有了一定的积累和突破,但是在实际的应用中由于影像分辨率、影像源和影像获取时间不同等因素,导致实际采集效果并不能满足生产需要,采集主要还是依靠大量的人工来完成。
4.现有的地表覆盖面要素数据采集主要通过人工采集面要素路径两侧边界的点来构成面要素,采集效率较低,难以满足急速增长的地理信息数据需求。
技术实现要素:
5.本发明的目的是解决现有的地表覆盖面要素数据采集主要通过人工采集面要素路径两侧的点来构成面要素,采集效率较低,难以满足急速增长的地理信息数据需求的技术问题,而提供了一种基于曲线拟合和内插的面要素采集方法。
6.本发明所采用的技术方案是:
7.一种基于曲线拟合和内插的面要素采集方法,其特殊之处在于,具体按照以下步骤实施:
8.步骤1、量算面要素采集路径开始端任意两点之间的距离作为面要素的初始宽度;
9.步骤2、绘制面要素;
10.步骤2.1、采集面要素采集路径开始端一侧的端点作为初始的采集节点,并获取该点的坐标值;
11.步骤2.2、沿面要素采集路径一侧的轨迹前进,采集沿该轨迹前进方向上的拐点作为下一采集节点,并获取该采集节点的坐标值;
12.步骤3、构造面要素;
13.步骤3.1、三角函数解算,按照采集节点的采集顺序依次解算当前采集到的所有采集节点在面要素采集路径另一侧相应位置上计算节点的坐标值;
14.步骤3.2、曲线拟合;
15.根据采集节点的坐标值和计算节点的坐标值对获得的采集节点和计算节点分别进行曲线拟合;
16.步骤3.3、曲线内插;
17.在采集节点的曲线拟合轨迹上相邻两个采集节点和计算节点的曲线拟合轨迹上相邻两个计算节点之间分别内插中间节点;
18.步骤3.4、完成当前面要素构造;
19.步骤4、根据当前完成构造的面要素与实际面要素的轨迹匹配程度,判断是否需要调整轨迹拐点处的面要素宽度;若是,则在初始宽度的基础上进行宽度调整并返回步骤3;若否,则返回步骤2.2,采集面要素采集路径轨迹前进方向上的下一个拐点,直至采集到面要素采集路径轨迹的终点,获得面要素整体构造;
20.步骤5、判断采集从端点至终点的面要素整体效果是否符合要求;若否,则返回步骤2直至面要素整体效果符合要求;若是,则进行面要素拓扑;
21.步骤6、显示拓扑后的面要素,完成面要素采集。
22.进一步地,步骤3.1中,定义任一采集节点和其对应的计算节点之间的距离为dn,任一采集节点的坐标值为(xn,yn),任一计算节点的坐标值为(x
1n
,y
1n
),n为1、2、3
…
;
23.步骤3.1具体包括以下步骤:
24.步骤3.1.1、计算相邻采集节点的连线与y轴正方向所成的夹角αn;
[0025][0026]
式中,x
n 1
和y
n 1
分别为下一采集节点的横坐标值和纵坐标值;
[0027]
步骤3.1.2、解算计算节点的坐标值(x
1n
,y
1n
);
[0028][0029][0030]
进一步地,步骤3.2具体包括以下步骤:
[0031]
步骤3.2.1、根据采集到的采集节点坐标值和解算出的计算节点坐标值分别获得采集节点集(xi,yi),(i=1、2、3
…
)和计算节点集(xj,yj),(j=1、2、3
…
);
[0032]
步骤3.2.2、根据采集节点集和计算节点集分别获得采集节点拟合模型yi=f(x,e);和计算节点拟合模型yj=f(x,f);
[0033]
式中,e和f分别为待确定参数;
[0034]
步骤3.2.3、根据采集节点拟合模型与计算节点拟合模型分别对获得的采集节点和计算节点进行曲线拟合。
[0035]
进一步地步骤3.3具体包括以下步骤:
[0036]
步骤3.3.1、获取相邻两个采集节点和相邻两个计算节点之间的间距;
[0037]
步骤3.3.2、根据采集节点拟合函数和相邻两个采集节点之间的间距、计算节点拟合函数和相邻两个计算节点之间的间距分别得到采集节点的内插公式和计算节点的内插公式;
[0038]
采集节点的内插公式为:e(λ,β)=(1-p)(1-q)e
0,0
p(1-q)e
1,0
(1-p)qe
0,1
pqe
1,1
;
[0039]
计算节点的内插公式为:
[0040]
式中:λ0、β0分别为采集节点的横坐标值和纵坐标值;λ、β分别为内插的中间节点横坐标值和纵坐标值;δλ、δβ分别为采集节点和中间节点的横坐标和
纵坐标间隔;κ0、ω0分别为计算节点的横坐标值和纵坐标值;κ、ω分别为内插的中间节点横坐标值和纵坐标值;δλ、δβ为计算节点和中间节点的横坐标和纵坐标间隔;e
0.0
为内插中间节点之前采集节点的坐标值;e
1.0
为内插中间节点之后采集节点的坐标值;e
0.1
为通过e
0.0
计算得出的计算节点坐标值;e
1.1
为通过e
1.0
计算得出的计算节点坐标值;
[0041]
步骤3.3.3、根据采集节点的内插公式和计算节点的内插公式在相邻两个采集节点和相邻两个计算节点之间分别内插中间节点。
[0042]
进一步地,步骤1中,定义初始宽度为d;
[0043]
步骤4中,所述修改轨迹拐点处的面要素宽度具体为:
[0044]
根据初始宽度计算调整步长l,l=0.1d;或者自定义调整步长l;
[0045]
在步骤3.1.2中,根据调整步长l,在初始宽度的基础上获得调整后的采集节点和其对应的计算节点之间的距离dn=d
±
ml;
[0046]
式中:m为调整次数,m取值为0、1、2、3
…
。
[0047]
进一步地,在步骤5中,通过与dom影像或dem/dsm数据比对,判断采集至终点的面要素整体效果是否符合要求。
[0048]
与现有技术相比,本发明的有益效果是:
[0049]
1、本发明通过采集面要素采集路径一侧的端点和轨迹拐点作为采集节点,并通过三角函数计算面要素采集路径另一侧的计算节点坐标值,并对面要素采集路径的两侧进行曲线拟合和曲线内插,从而达到只需采集面要素采集路径的一侧边界即可完成整个面要素的采集工作,减少了人工采集的工作强度,提高了采集效率,从而满足急速增长的地理信息数据需求,并且获取的面要素边界准确。
附图说明
[0050]
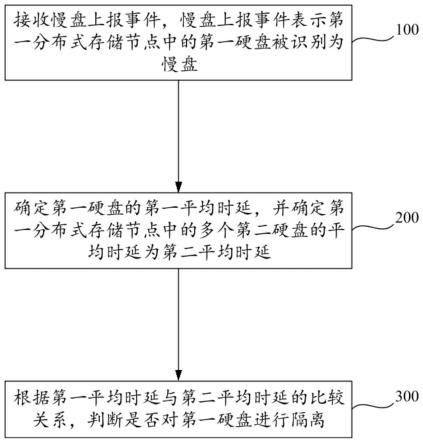
图1是本发明一种基于曲线拟合和内插的面要素采集方法实施例的流程图;
[0051]
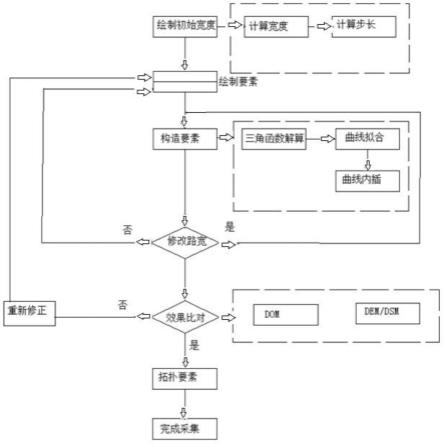
图2是本发明一种基于曲线拟合和内插的面要素采集方法的面要素构造原理图。
具体实施方式
[0052]
下面结合附图和具体实施方式对本发明进行详细说明。
[0053]
如图1所示,本发明一种基于曲线拟合和内插的面要素采集方法,其采集的对象包括各种地表覆盖的面要素,例如:公路、沟渠、河道等,具体按照以下步骤实施:
[0054]
步骤1、量算面要素采集路径开始端任意两点之间的距离作为面要素的初始宽度;定义初始宽度为d,所述修改轨迹拐点处的面要素宽度具体为:根据初始宽度计算调整步长l,l=0.1d,或自定义调整步长l;通过设置的调整步长,可以控制宽度修改时的修改幅度,通过较少次数的修改调整即可将面要素宽度调整至误差范围较小的范围内;初始宽度在具体取值接近实际面要素开始端宽度即可,可减少调节此处;差值较大也同样可以,相应的计算出的调整布长较小,调整次数较大,但更为精确;
[0055]
并且根据实际情况选择是否拓扑地表和去除超范围的边界要素;
[0056]
步骤2、绘制面要素;
[0057]
步骤2.1、采集面要素采集路径开始端一侧的端点作为初始的采集节点(如图2中的a点),并获取该点的坐标值;
[0058]
步骤2.2、沿面要素采集路径一侧的轨迹前进,采集沿该轨迹前进方向上拐点作为下一采集节点(如图2中的b点或c点),并获取该采集节点的坐标值;
[0059]
步骤3、构造面要素;
[0060]
步骤3.1、按照采集节点的采集顺序依次解算当前采集到的所有采集节点在面要素采集路径另一侧相应位置上计算节点的坐标值(如图2中的a
‵
、b
‵
或c
‵
);
[0061]
定义任一采集节点和其对应的计算节点之间的距离为dn,根据调整步长l,在初始宽度的基础上获得调整后的采集节点和其对应的计算节点之间的距离dn=d
±
ml;式中:m为调整次数,m取值为0、1、2、3
…
;通过在初始宽度的基础上增加或减小一定数值,可以在采集过程中根据路宽进行实时调整,提高面要素采集精度;任一采集节点的坐标值为(xn,yn),任一计算节点的坐标值为(x
1n
,y
1n
),n为1、2、3
…
;第一次采集到的采集节点坐标值为(x1,y1),对应图2中的a点;相应的第一个计算节点的坐标值为(x
11
,y
11
),对应图2中的a
‵
点;依次类推,(x2,y2)对应图2中的b点,(x
12
,y
12
)对应图2中的b
‵
点;
[0062]
步骤3.1.1、计算先采集到的采集节点处沿面要素采集路径前进方向与y轴正方向所成的夹角αn;
[0063][0064]
式中,x
n 1
和y
n 1
分别为下一采集节点的横坐标值和纵坐标值;
[0065]
步骤3.1.2、解算计算节点坐标值(x
1n
,y
1n
);
[0066][0067][0068]
步骤3.2、曲线拟合,由于各个采集节点之间为折线显示,而实际地表一般都是连续渐变的,为了更好地贴合实际地表,将采集到的采集节点进行曲线拟合;
[0069]
根据采集节点的坐标值和计算节点的坐标值对获得的采集节点和计算节点分别进行曲线拟合;
[0070]
步骤3.2.1、根据采集到的采集节点坐标值和解算出的计算节点坐标值分别获得采集节点集(xi,yi),(i=1、2、3
…
)和计算节点集(xj,yj),(j=1、2、3
…
);
[0071]
步骤3.2.2、根据采集节点集和计算节点集分别获得采集节点拟合模型yi=f(x,e);和计算节点拟合模型yj=f(x,f);
[0072]
式中,e和f分别为待确定参数;
[0073]
步骤3.2.3、根据采集节点拟合函数与计算节点拟合函数分别对获得的采集节点和计算节点进行曲线拟合;
[0074]
步骤3.3具体包括以下步骤:
[0075]
步骤3.3.1、获取相邻两个采集节点和相邻两个计算节点之间的间距;
[0076]
步骤3.3.2、根据采集节点拟合函数和相邻两个采集节点之间的间距、计算节点拟合函数和相邻两个计算节点之间的间距分别得到采集节点的内插公式和计算节点的内插公式;
[0077]
采集节点的内插公式为:e(λ,β)=(1-p)(1-q)e
0,0
p(1-q)e
1,0
(1-p)qe
0,1
pqe
1,1
;
[0078]
计算节点的内插公式为:
[0079]
式中:λ0、β0分别为采集节点的横坐标值和纵坐标值;λ、β分别为内插的中间节点横坐标值和纵坐标值;δλ、δβ分别为采集节点和中间节点的横坐标和纵坐标间隔;κ0、ω0分别为计算节点的横坐标值和纵坐标值;κ、ω分别为内插的中间节点横坐标值和纵坐标值;δλ、δβ为计算节点和中间节点的横坐标和纵坐标间隔;e
0.0
为内插中间节点之前采集节点的坐标值;e
1.0
为内插中间节点之后采集节点的坐标值;e
0.1
为通过e
0.0
计算得出的计算节点坐标值;e
1.1
为通过e
1.0
计算得出的计算节点坐标值;
[0080]
步骤3.3.3、根据采集节点的内插公式和计算节点的内插公式在相邻两个采集节点和相邻两个计算节点之间分别内插中间节点;
[0081]
如图2中的点r、点q、点p、点n、点j、点l和点k均为内插在采集节点拟合曲线上的中间节点,点s、点t、点u、点v、点w、点x、点y和点z均为内插在计算节点拟合曲线上的中间节点;
[0082]
步骤3.4、完成当前面要素构造;
[0083]
步骤4、根据当前完成构造的面要素与实际面要素的轨迹匹配程度,判断是否需要调整轨迹拐点处的面要素宽度;若是,则在初始宽度的基础上进行宽度调整并返回步骤3;若否,则返回步骤2.2,采集面要素采集路径轨迹前进方向上的下一个拐点,直至采集到面要素采集路径轨迹的终点,获得面要素整体构造;
[0084]
步骤5、通过与dom影像(数字正射影像图)或dem(数字高程模型)/dsm(数字地表模型)数据比对,判断采集从端点至终点的面要素整体效果是否符合要求(即判断完成构造的面要素轨迹与实际面要素轨迹的匹配偏差);若否,则返回步骤2直至面要素整体效果符合要求;若是,则进行面要素拓扑;
[0085]
步骤6、显示拓扑后的面要素,完成全部的面要素采集。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。