1.本发明属于光学显微观测技术领域,具体涉及一种传统光学显微镜三维模糊特性的建模方法。
背景技术:
2.传统光学显微镜具有成本低廉,不需要特殊的观测环境,对观测样本不具有破坏性,成像速度快等优点。因此,基于传统光学显微镜的光学显微观测技术在各个领域的应用具有无可替代的优势。
3.虽然基于传统光学显微镜的显微观测方法有其独特的优势,但是在实际应用中却面临着成像模糊问题。影响成像清晰度的两种主要原因:首先,由于传统光学显微镜的景深较小,因此传统光学系统的准确对焦较为困难,从而使得离焦对光学成像质量影响较大;其次,衍射作为在光学系统中不可避免的现象,也会造成成像的模糊。
4.对于传统光学显微镜的成像模糊问题,一般会针对显微光学系统的模糊特性进行分析,以确定其模糊度的变化规律,从而进一步解决成像的模糊问题。目前,对于传统光学显微镜的模糊特性,一般采用点扩散函数对其进行定量分析。而对于光学系统中点扩散函数的获取通常采用建模和实验两种方法。对于建模方法,一般会针对自由空间中的光学衍射机制进行数学建模,并以此确定点扩散函数,并据此进一步分析光学系统的模糊特性。而对于实验方法,一般应用于荧光成像系统,将小颗粒固定在光学凝胶中并对其形态学图像进行测量,从而获得点扩散函数,进而获得成像系统的模糊规律。对于传统光学显微镜模糊特性的建模方法,由于显微系统本身的结构复杂,因此针对具体的显微系统,对其成像模糊特性的精确建模是非常困难的,并且难以同时对光学衍射及离焦两种影响成像清晰度的主要原因进行定量分析。而对于通过实验方法获取光学系统点扩散函数,从而间接获得系统模糊特性,则由于材质本身折射率变化以及无法连续测量等固有缺陷,导致无法通过实验的方法获得光学系统模糊度变化规律的精确数学模型。
技术实现要素:
5.针对现有技术存在的问题,本发明提供了一种传统光学显微镜三维模糊特性的建模方法,能够根据传统光学显微镜的光学参数,同时兼顾光学衍射以及离焦对于成像清晰度的影响,建立光学成像模糊度变化规律的数学模型,进而可以通过改变系统的离焦深度,对光学系统的成像模糊程度进行定量分析。
6.本发明的技术方案为:
7.一种传统光学显微镜三维模糊特性的建模方法,该方法包括以下步骤:
8.步骤1:基于菲涅尔衍射理论建立光学系统中成像面上任意点的光振幅表达式;
9.步骤2:利用弥散斑直径与被观测物体之间的几何关系构建不含理想物距的物距变化与像距变化之间的关系;
10.步骤3:根据步骤1建立的光学系统中成像面上任意点的光振幅表达式和步骤2构
建的不含理想物距的物距变化与像距变化之间的关系,推导出成像面上任意点的包含物距变化量的光振幅表达式;
11.步骤4:根据成像面上任意点的包含物距变化量的光振幅表达式,推导出成像面上任意点的光强分布表达式;
12.步骤5:根据成像面上任意点的光强分布表达式建立模糊度与离焦深度变化之间的关系,从而得到传统光学显微系统的模糊度的变化规律。
13.进一步地,根据所述的传统光学显微镜三维模糊特性的建模方法,所述步骤2包括如下步骤:
14.步骤2.1:利用被观测物体移动时的弥散斑直径与物高的比值建立像距变化与理想像距之间的比例关系:
[0015][0016]
上式中,p1为被观测目标移动时的弥散斑直径;d为物高;δb为物体移动前后像距变化;b0为显微镜的理想像距;
[0017]
步骤2.2:利用成像面移动后的弥散斑直径与光路径向距离变化的比值建立理想物距与理想像距之间的比例关系:
[0018][0019]
上式中,p2为像距移动时的弥散斑直径;h为物距变化后光路的径向距离变化;d0为显微镜的理想物距;
[0020]
步骤2.3:利用几何关系,建立物体移动前后的光路的径向变化距离的表达式:
[0021][0022]
上式中,δd为物体移动前后物距变化;
[0023]
步骤2.4:令上述被观测物体移动后的弥散斑直径和成像面移动移动后的弥散斑直径不变,建立包含理想物距的物距变化与像距变化之间的关系:
[0024][0025]
上式中,δb为像距变化量;
[0026]
步骤2.5:根据几何光学的成像公式,得到不含理想物距的物距变化与像距变化之间的关系:
[0027][0028]
ξ=b
0-f
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0029]
上式中,f为显微镜的焦距;ξ为理想像距与焦距的差值。
[0030]
进一步地,根据所述的传统光学显微镜三维模糊特性的建模方法,所述成像面上任意点的包含物距变化量的光振幅表达式e
p
如下:
[0031][0032][0033][0034][0035][0036]
上式中,a为显微镜透镜的有效半径。
[0037]
进一步地,根据所述的传统光学显微镜三维模糊特性的建模方法,所述成像面上任意点的光强分布表达式如下:
[0038][0039]
进一步地,根据所述的传统光学显微镜三维模糊特性的建模方法,所述步骤5包括如下步骤:
[0040]
步骤5.1:根据正交多项式的性质,对成像面上任意点的光强分布表达式进行变化,得到基于正交多项式的光强分布表达式;
[0041]
步骤5.2:在基于正交多项式的光强分布表达式的基础上加入参数k,构建较精确的光强分布表达式;所述参数为一组介于1到7之间的常数;
[0042]
步骤5.3:在较精确的光强分布表达式的基础上对贝塞尔函数以及指数函数进行高斯拟合,得到简化后的光强分布表达式;
[0043]
步骤5.4:基于简化后的光强分布表达式得到模糊度与离焦深度变化之间的关系表达式。
[0044]
进一步地,根据所述的传统光学显微镜三维模糊特性的建模方法,所述基于正交多项式的光强分布表达式为:
[0045][0046][0047]
上式中,e为自然常数;j0为零阶贝塞尔函数;n为贝塞尔函数的阶数。
[0048]
进一步地,根据所述的传统光学显微镜三维模糊特性的建模方法,所述较精确的光强分布表达式为:
[0049][0050][0051]
进一步地,根据所述的传统光学显微镜三维模糊特性的建模方法,所述简化后的光强分布表达式为:
[0052][0053]
进一步地,根据所述的传统光学显微镜三维模糊特性的建模方法,所述模糊度与离焦深度变化之间的关系表达式为:
[0054][0055]
式中,参数σ为显微镜的模糊度。
[0056]
与现有技术相比,本发明提出的技术方案具有以下有益效果:
[0057]
本发明方法在菲涅尔衍射理论的基础上,为传统光学显微镜提供了一种同时兼顾光学衍射以及离焦对于成像清晰度影响的建模方法,并且同时引入实际的光学系统参数,巧妙地将各种基于不同显微系统的复杂点扩散函数模型简化为一种通用的光强分布模型,并通过对表达式中部分复杂函数进行拟合,以达对复杂的光强表达式化简的目的,进一步得到光学系统的模糊度的表达式。本发明方法可基于实际的光学系统直接进行设计,对不同参数的显微系统,不需要依赖复杂的计算,直接得到显微系统模糊度的变化规律,构建过程简单。
附图说明
[0058]
为了更清楚地说明本发明实施例中的具体方式,下面将对实施例中涉及的相关附图做简单说明,下面的附图仅仅是本发明的优选实施例,对于本领域普通技术人员来说,在没有创造性改变的前提下,可以根据这些附图获得其它的附图。
[0059]
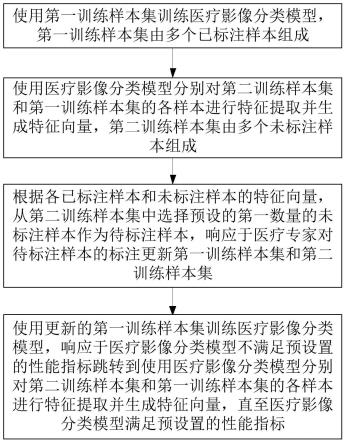
图1为本实施方式传统光学显微镜三维模糊特性的建模方法的流程示意图;
[0060]
图2为球面波传播模型的原理图;
[0061]
图3为本实施方式光学系统中球面波传播模型的结构示意图;
[0062]
图4为本实施方式物距变化与像距变化之间的关系图;
[0063]
图5为本实施方式参数k的分布图;
[0064]
图6为本实施方式显微镜的模糊度实验结果图。
具体实施方式
[0065]
为了便于理解本技术,下面将参照相关附图对本技术进行更全面的描述。附图中给出了本技术的较佳实施方式。但是,本技术可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本技术的公开内容理解的更加透彻全面。
[0066]
本发明的技术关键点在于:
[0067]
1、基于菲涅尔衍射理论,通过引入实际光学系统参数,建立了在光学衍射和离焦双重影响下的光学传播模型;
[0068]
2、通过弥散斑直径不变的模型,引入物距变化与像距变化之间的关系,从而建立了光强分布与离焦深度的关系模型;
[0069]
3、在光强分布模型的基础上,通过对高阶贝塞尔函数以及其他复杂函数的简化,进一步得到了显微系统的模糊度与离焦深度变化之间的关系。
[0070]
图1是本实施方式传统光学显微镜三维模糊特性的建模方法的流程示意图,所述传统光学显微镜三维模糊特性的建模方法包括以下步骤:
[0071]
步骤1:基于菲涅尔衍射理论建立光学系统中成像面上任意点的光振幅表达式;
[0072]
步骤1.1:基于图2所示的球面波传播模型得到成像面上任意点的振幅e
p
,表达式为:
[0073][0074][0075][0076]
上式中,i为虚数单位;e0为成像面与光轴交汇处的光振幅;λ为光源的波长;d为物距;b为像距;k为波数;ρ为成像面上的某点到光轴的距离;q为球面波上的某点到光轴的距离;g为球面波上的某点到成像面上的某点与光轴的平行线的距离;φ为球面波的波面;dφ为球面波的面元;α为波面上某点到光轴连线与光轴垂线形成的夹角;r为波面上某点到成像面上某点的距离。
[0077]
在图2中,p0为球面波的波源;φ为球面波的波面;q0为球面波的中心;r为球面波的半径;q为球面波上任意点;θ为r与r的夹角;p为球面波传播路径上的任意点。
[0078]
步骤1.2:根据显微镜的系统参数,并基于图3所示的光学系统中球面波的传播模型,得到式(4)所示的光学系统中成像面上某点的振幅e
p
的表达式;所述显微镜的系统参数包括光源的波长λ、波数k、系统的理想像距b0和系统的焦距f。
[0079][0080]
[0081]
上式中,n为贝塞尔函数的阶数;jn为n阶贝塞尔函数;a为物镜的有效半径。
[0082]
步骤2:利用弥散斑直径与被观测物体之间的几何关系构建不含理想物距的物距变化与像距变化之间的关系;
[0083]
步骤2.1:利用被观测物体移动时的弥散斑直径与物高的比值建立像距变化与理想像距之间的比例关系
[0084][0085]
上式中,p1为被观测目标移动时的弥散斑直径;d为物高;δb为物体移动前后像距变化;b0为显微镜的理想像距。
[0086]
步骤2.2:利用成像面移动后的弥散斑直径与光路径向距离变化的比值建立理想物距与理想像距之间的比例关系如下:
[0087][0088]
上式中,p2为像距移动时的弥散斑直径;h为物距变化后光路的径向距离变化;d0为显微镜的理想物距。
[0089]
步骤2.3:利用几何关系,建立物体移动前后的光路的径向变化距离的表达式,其表达式为:
[0090][0091]
上式中,δd为物体移动前后物距变化。
[0092]
步骤2.4:令上述被观测物体移动和成像面移动两次移动后弥散斑直径不变,如图4所示,建立包含理想物距的物距变化与像距变化之间的关系,其表达式为:
[0093][0094]
上式中,δb为像距变化量。
[0095]
步骤2.5:根据几何光学的成像公式,得到不含理想物距的物距变化与像距变化之间的关系,其表达式为:
[0096][0097]
ξ=b
0-f
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0098]
上式中,f为显微镜的焦距;ξ为理想像距与焦距的差值。
[0099]
步骤3:根据步骤1建立的光学系统中成像面上任意点的光振幅表达式和步骤2构建的不含理想物距的物距变化与像距变化之间的关系,得到成像面上任意点的包含物距变化量的光振幅表达式e
p
:
[0100]
[0101][0102][0103][0104][0105]
上式中,a为显微镜透镜的有效半径。
[0106]
步骤4:根据成像面上任意点的包含物距变化量的光振幅表达式,得到成像面上任意点的光强分布表达式如下:
[0107][0108]
步骤5:根据成像面上任意点的光强分布表达式建立模糊度与离焦深度变化之间的关系;
[0109]
步骤5.1:根据正交多项式的性质,对成像面上任意点的光强分布表达式进行变化,得到基于正交多项式的光强分布表达式为:
[0110][0111][0112]
式中,e为自然常数,j0为零阶贝塞尔函数,n为贝塞尔函数的阶数,
[0113]
步骤5.2:在基于正交多项式的光强分布表达式的基础上加入参数k,构建式(20)所示的较精确的光强分布表达式。所述参数k的分布参见图5,参数k为一组介于1到7之间的常数。
[0114][0115]
[0116]
步骤5.3:在较精确的光强分布表达式的基础上对贝塞尔函数以及指数函数进行高斯拟合,得到简化后的光强分布表达式为:
[0117][0118][0119][0120]
式中,参数a1,a2分别为拟合后的幅值,ε1,ε2分别为拟合后的标准差。
[0121]
步骤5.4:基于简化后的光强分布表达式即式24得到模糊度与离焦深度变化之间的关系表达式为:
[0122][0123]
式中,参数σ为显微镜的模糊度,实验结果如图6所示。由图6可知,光学显微镜的成像模糊度σ与物距变化δd相关,σ随δd的变化呈一条对称曲线分布。
[0124]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解;其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;因而这些修改或者替换,并不使相应技术方案的本质脱离本发明权利要求所限定的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。