技术特征:
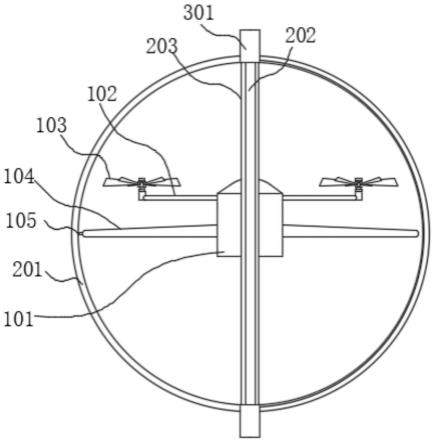
1.一种垂直起降无人机,包括机体(101),机体(101)内安装有控制模块,控制模块电性连接有遥控端,机体(101)上安装有多组螺旋支架(102),螺旋支架(102)上分别安装有螺旋桨(103),机体(101)侧面还安装有至少两组平衡翼(104),其特征在于,所述平衡翼(104)端部安装有连接轴(105),连接轴(105)可旋转连接有第一防护环(201),第一防护环(201)上固定安装有两组安装筒(301),两组安装筒(301)设置于第一防护环(201)的同一条直径上,安装筒(301)固定连接有两组第二防护环(202),第二防护环(202)两侧分别安装有移动防护环(203),移动防护环(203)具有向着第一防护环(201)旋转的趋势,移动防护环(203)与第二防护环(202)之间连接有收缩布(205),安装筒(301)中设有安装腔(302),安装腔(302)中还设有限位组件,限位组件至少具有一个锁紧位置和一个避让位置,限位组件处于锁紧位置时,移动防护环(203)的旋转趋势被抑制,限位组件处于避让位置时,移动防护环(203)向着第一防护环(201)的运动趋势不受抑制,收缩布打开。2.根据权利要求1所述的一种垂直起降无人机,其特征在于,所述移动防护环(203)两端连接有扭力轴(206),扭力轴(206)端部与安装腔(302)的内壁可旋转连接,扭力轴(206)上套设有扭力弹簧(207),扭力弹簧(207)使得移动防护环(203)具有向着第一防护环(201)旋转的趋势,扭力轴(206)上连接有安装柱,安装柱侧面安装有限位销(305),所述限位组件包括安装于安装腔(302)中的卡板(307),卡板(307)两端分别一体成型有限位板(308),限位板(308)限制限位销(305)运动。3.根据权利要求2所述的一种垂直起降无人机,其特征在于,所述卡板(307)固定连接有电动伸缩杆(323),电动伸缩杆(323)固定安装于安装腔(302)的内壁上,电动伸缩杆(323)与控制模块电性连接,控制模块检测到无人机飞行异常则控制电动伸缩杆(323)缩短,使得卡板(307)从锁紧位置移动至避让位置。4.根据权利要求2所述的一种垂直起降无人机,其特征在于,所述卡板(307)与安装腔(302)的内壁之间固定连接有回缩弹簧(322),回缩弹簧(322)使得卡板(307)具有从锁紧位置移动至避让位置的趋势。5.根据权利要求1所述的一种垂直起降无人机,其特征在于,所述安装筒(301)中还设有弹射腔(309),弹射腔(309)中安装有弹射筒(310),弹射筒(310)开口朝向远离机体(101)的一侧,所述弹射筒(310)内部安装有弹射弹簧(324),所述弹射弹簧(324)连接有推板(311),推板(311)抵触连接有重力球(312),弹射弹簧(324)被压缩,推板(311)具有将重力球(312)弹出的趋势,所述重力球(312)连接有拉线(318),弹射筒(310)侧壁上开设有通孔(313),拉线(318)自通孔(313)延伸至弹射腔(309)中,所述弹射腔(309)中安装有可旋转的收线辊(316),拉线(318)绕卷于收线辊(316)上,收线辊(316)连接有限位单元,拉线(318)端部固定连接有拉力计(317),所述安装柱端部安装有按压开关(304),移动防护环(203)自第二防护环(202)向第一防护环(201)旋转过程中,两组相对的按压开关(304)相互挤压触发,按压开关(304)与限位单元电性连接,控制模块实时记录无人机飞行高度,并根据飞行高度计算无人机坠落时间t,限位单元电性连接有延时单元,延时单元设定有延时时间t,则t=t t
设
,其中t
设
为设定值,排除无人机下坠过程中碰撞时间的影响,按压开关(304)触发后,延时单元启动计时,在延时时间t后,限位单元解除对收线辊(316)的限位,拉力计(317)检测拉线(318)拉力大小并判断无人机的位置状态。6.根据权利要求5所述的一种垂直起降无人机,其特征在于,两组所述拉力计(317)分
别检测其连接的拉线(318)的拉力数据f1、f2,拉力计(317)电性连接有比较单元,比较单元中设有标准重力m,标准重力m为重力球(312)的重力,若f1≥m与f2≥m成立至少一项,则判定无人机悬空,进一步判定f1≥m与f2≥m是否仅成立其中一项,若是,且判定悬空高度低于拉线(318)长度,否则不判定无人机悬空高度,若f1≥m或f2≥m都不成立,则判定无人机坠地,判断单元将判断结果发送至控制模块,控制模块将无人机gps定位以及判断结果发送至遥控端。7.根据权利要求5所述的一种垂直起降无人机,其特征在于,所述限位单元包括安装于收线辊(316)两端的安装轴(315),所述弹射腔(309)内部安装有安装座(314),安装轴(315)安装于安装座(314)上,安装轴(315)一端端部连接有限位座(319),所述限位座(319)端面上开设有限位孔,弹射腔(309)内壁上安装有伸缩限位杆(320),所述伸缩限位杆(320)端部设有与限位孔相适配的限位柱,限位柱插入限位孔中限制收线辊(316)旋转。8.根据权利要求1所述的一种垂直起降无人机,其特征在于,所述安装轴(315)远离限位座(319)的端部延伸至弹射腔(309)外部,安装轴(315)位于弹射腔(309)外部的端部固定连接有手柄(321)。9.根据权利要求1-8任一项所述的一种垂直起降无人机系统,其特征在于,包括:飞行动力模块,用于提供飞行动力;控制模块,用于控制无人机的整体飞行,包括飞行参数单元和故障检测单元,所述飞行参数单元记录并测量无人机飞行数据,包括飞行高度、飞行速度数据;所述故障检测单元用于检测无人机是否处于故障状态;防护模块,用于对无人机机身进行防护;遥控端,用于与控制模块建立信号连接,向控制单元发送指令,控制飞行动力模块改变无人机飞行状态;故障检测单元判定无人机处于故障状态时,将信号发送至防护模块,防护模块由飞行防撞状态切换至坠落防撞状态,其中飞行防撞状态下,防护模块在无人机周侧建立防撞环;坠落防撞状态下,防护模块在无人机周侧建立密闭防护球层。10.根据权利要求9所述的一种垂直起降无人机系统,其特征在于,所述防护模块还包括:弹射单元:用于从无人机的两个方向弹射出重力球;限位单元:处于常开状态,用于限制弹射单元工作;计算单元:实时抓取无人机飞行数据,并根据无人机飞行数据计算无人机坠落时间t;延时单元:用于延时启动限位单元,其中延时单元内存储有设定值t
设
,延时启动时间t=t t
设
,在计时至t时,发送信号至限位单元;拉力检测单元:用于检测重力球弹出后,重力球产生的最终稳定不变的拉力数值f1与f2;比较单元:存储有标准值m,标准值m为重力球重力,将f1和f2与m比较,判定无人机落点悬空或坠地,并将判定结果发送至控制模块;其中,若f1≥m或f2≥m成立其中任一项,则判定无人机悬空,若f1≥m或f2≥m都不成立,则判定无人机坠地;控制模块还包括定位单元,用于定位无人机位置,接收比较单元发送的判定结果,并将无人机位置以及判定结果发送至遥控单元;
遥控单元,接收无人机位置以及判定结果并显示。
技术总结
本发明涉及无人机技术领域,具体涉及一种垂直起降无人机及其系统,包括安装于平衡翼端部的连接轴,连接轴可旋转连接有第一防护环,第一防护环上固定安装有两组安装筒,安装筒固定连接有两组第二防护环,第二防护环两侧分别安装有移动防护环,移动防护环与第二防护环之间连接有收缩布,移动防护环两端连接有扭力轴,安装筒中设有安装腔,安装腔中还设有卡板,卡板两端分别一体成型有限位板,卡板至少具有一个锁紧位置和一个避让位置,卡板处于锁紧位置时,限位板对限位销进行限位,卡板处于避让位置时,限位板解除对限位销的限位,移动防护环向着第一防护环的运动趋势不受抑制。坠落时对无人机全方位防护,同时不易挂在树梢,方便回收。回收。回收。
技术研发人员:廖阔 孔凤 赵明琛
受保护的技术使用者:徐州芒原智能科技有限公司
技术研发日:2022.09.20
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。