1.本公开涉及信息处理装置、程序以及信息处理方法涉及。
背景技术:
2.在自动驾驶巴士那样的自动驾驶车辆因故障等而发生了运行停止的情况下,需要对停止了运行的自动驾驶车辆做出应对。
3.例如,专利文献1公开了一种当强制制动器在无人驾驶行驶中的自动驾驶车辆工作时、根据车辆停止状况来变更对向车辆输出操作指令的车外操作部赋予的操作权限的方法。
4.专利文献1:日本特开2018-60450号公报
5.当在多个自动驾驶车辆中同时发生了运行停止的情况下,优选救援队按照恰当的优先顺位赶往停止了运行的自动驾驶车辆。
技术实现要素:
6.本公开的目的在于,当在多个自动驾驶车辆发生了运行停止的情况下能够恰当地决定救援队赶往的优先顺位。
7.本公开所涉及的信息处理装置具备控制部,若自动驾驶车辆发生运行停止,则该控制部取得上述自动驾驶车辆的位置信息、车辆信息、车内影像以及车外影像,并在多个上述自动驾驶车辆发生了运行停止的情况下,基于上述位置信息、上述车辆信息、上述车内影像以及上述车外影像来决定救援队奔向多个上述自动驾驶车辆的优先顺位。
8.本公开所涉及的程序使计算机执行包括下述处理的动作:
9.若自动驾驶车辆发生运行停止,则取得上述自动驾驶车辆的位置信息、车辆信息、车内影像以及车外影像;和
10.当在多个上述自动驾驶车辆发生了运行停止的情况下,基于上述位置信息、上述车辆信息、上述车内影像以及上述车外影像来决定救援队奔向多个上述自动驾驶车辆的优先顺位。
11.本公开所涉及的信息处理方法是信息处理装置中的信息处理方法,包括:
12.若自动驾驶车辆发生运行停止,则取得上述自动驾驶车辆的位置信息、车辆信息、车内影像以及车外影像;和
13.当在多个上述自动驾驶车辆发生了运行停止的情况下,基于上述位置信息、上述车辆信息、上述车内影像以及上述车外影像来决定救援队奔向多个上述自动驾驶车辆的优先顺位。
14.根据本公开,当在多个自动驾驶车辆发生了运行停止的情况下,能够恰当地决定救援队赶往的优先顺位。
附图说明
15.图1是表示本公开的实施方式所涉及的信息处理系统的构成的图。
16.图2是表示本公开的实施方式所涉及的信息处理装置的构成的框图。
17.图3是表示本公开的实施方式所涉及的自动驾驶车辆的构成的框图。
18.图4是表示本公开的实施方式所涉及的终端装置的构成的框图。
19.图5是表示本公开的实施方式所涉及的信息处理系统的动作的流程图。
20.附图标记说明:
[0021]1…
信息处理系统;10
…
信息处理装置;11
…
通信部;12
…
存储部;13
…
输入部;14
…
输出部;15
…
控制部;20
…
自动驾驶车辆;21
…
通信装置;22
…
照相机;23
…
控制装置;24
…
ecu;25
…
位置信息取得装置;26
…
输出装置;27
…
紧急按钮;30
…
终端装置;31
…
通信部;32
…
存储部;33
…
输入部;34
…
输出部;35
…
控制部;40
…
网络。
具体实施方式
[0022]
以下,参照附图对本公开的实施方式进行说明。
[0023]
图1是表示本公开的实施方式所涉及的信息处理系统1的构成的图。参照图1对本公开的实施方式所涉及的信息处理系统1的构成以及概要进行说明。
[0024]
信息处理系统1具备信息处理装置10、多个自动驾驶车辆20以及终端装置30。信息处理装置10、自动驾驶车辆20以及终端装置30经由网络40连接为能够通信。网络40可以是包括移动通信网以及因特网等的网络。
[0025]
在图1中,示出了1台信息处理装置10,但信息处理装置10可以为2台以上。另外,在图1中,示出了多台自动驾驶车辆20,但自动驾驶车辆20的台数可以为2台以上的任意台数。另外,在图1中,示出了1台终端装置30,但终端装置30可以为2台以上。
[0026]
自动驾驶车辆20例如可以是通过自动驾驶运行的路线巴士、或者通过自动驾驶运行的观光巴士等。自动驾驶车辆20例如是汽油车、柴油车、hev(hybrid electric vehicle)、phev(plug-in hybrid electric vehicle)、bev(battery electric vehicle)、或者fcev(fuel cell electric vehicle)等任意种类的汽车。自动驾驶车辆20可以以任意的等级使驾驶自动化。自动化的等级例如可以是sae(society of automotive engineers)的分级中的等级1~等级5的任一等级。
[0027]
终端装置30是救援队拥有的终端装置。但因故障等而在自动驾驶车辆20发生了运行停止的情况下,救援队能够赶到发生了运行停止的自动驾驶车辆20,来对运行停止的原因做出应对。
[0028]
终端装置30可以是救援队所持有的终端装置,也可以是设置于救援队所属的组织的建筑物的终端装置。
[0029]
救援队能够根据自动驾驶车辆20的运行停止的原因来进行必要的应对。例如,在自动驾驶车辆20因故障而运行停止的情况下,救援队修理自动驾驶车辆20的故障。另外,例如在自动驾驶车辆20的故障不是能够容易修理的故障的情况下,救援队利用拖车等来使自动驾驶车辆20移动至修理工厂等。另外,例如在自动驾驶车辆20因应对急发病的乘客而运行停止的情况下,救援队进行急发病的乘客的治疗/运送等。
[0030]
若自动驾驶车辆20发生运行停止,则信息处理装置10从运行停止了的自动驾驶车
辆20取得自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影像。当在多个自动驾驶车辆20发生了运行停止的情况下,信息处理装置10基于从各个自动驾驶车辆20取得的位置信息、车辆信息、车内影像以及车外影像来决定救援队奔向多个自动驾驶车辆20的优先顺位。信息处理装置10将所决定的优先顺位的信息发送至救援队的终端装置30。
[0031]
救援队能够基于接收到的优先顺位来奔向运行停止的多个自动驾驶车辆20。
[0032]
信息处理装置10能够与自动驾驶车辆20以及终端装置30经由网络40实现通信。信息处理装置10例如是构成为作为服务器发挥功能的专用的计算机。信息处理装置10也可以是通用的pc(personal computer)。
[0033]
自动驾驶车辆20能够经由网络40与信息处理装置10实现通信。
[0034]
终端装置30能够经由网络40与信息处理装置10实现通信。终端装置30例如可以是智能手机、平板电脑或者通用的pc等。
[0035]
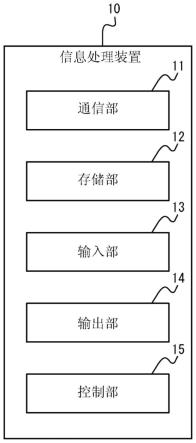
参照图2对本公开的实施方式所涉及的信息处理装置10的构成进行说明。
[0036]
信息处理装置10具备通信部11、存储部12、输入部13、输出部14以及控制部15。
[0037]
通信部11包括与网络40连接的通信模块。例如,通信部11可以包括与lan(local area network)对应的通信模块。在一个实施方式中,信息处理装置10经由通信部11与网络40连接。通信部11经由网络40来发送以及接收多种信息。通信部11能够经由网络40来与自动驾驶车辆20以及终端装置30实现通信。
[0038]
存储部12例如是半导体存储器、磁存储器或者光存储器等,但并不限定于这些。存储部12例如可以作为主存储装置、辅助存储装置或者缓存来发挥功能。存储部12存储在信息处理装置10的动作中使用的任意的信息。例如,存储部12可以存储系统程序、应用程序以及由通信部11接收到的各种信息等。存储于存储部12的信息例如能够通过经由通信部11从网络40接收的信息来更新。存储部12的一部分被可以设置于信息处理装置10的外部。该情况下,设置于外部的存储部12的一部分可以经由任意的接口来与信息处理装置10连接。
[0039]
输入部13包括检测用户输入并取得基于用户的操作的输入信息的1个以上的输入用接口。例如,输入部13包括物理键、静电电容键、与输出部14的显示器一体设置的触摸屏、或者受理声音输入的话筒等,但并不限定于这些。
[0040]
输出部14包括输出信息来通知给用户的1个以上的输出用接口。例如,输出部14包括通过图像输出信息的显示器、通过声音输出信息的扬声器等,但并不限定于此。
[0041]
控制部15包括至少1个处理器、至少1个专用电路、或者它们的组合。处理器是cpu(central processing unit)或gpu(graphics processing unit)等通用处理器、或者为了特定的处理定制的专用处理器。专用电路例如是fpga(field-programmable gate array)或者asic(application specific integrated circuit)。控制部15控制信息处理装置10的各部来执行与信息处理装置10的动作有关的处理。
[0042]
参照图3对本公开的实施方式所涉及的自动驾驶车辆20的构成进行说明。
[0043]
自动驾驶车辆20具备通信装置21、照相机22、控制装置23、ecu(electronic control unit)24、位置信息取得装置25、输出装置26以及紧急按钮27。通信装置21、照相机22、控制装置23、ecu24、位置信息取得装置25、输出装置26以及紧急按钮27例如能够经由can(controller area network)等车载网络或专用线连接为相互能够通信。
[0044]
通信装置21包括与网络40连接的通信模块。例如,通信装置21可以包括与lte、4g
以及5g等移动通信标准对应的通信模块。自动驾驶车辆20经由通信装置21与网络40连接。通信装置21经由网络40发送以及接收多种信息。通信装置21能够经由网络40与信息处理装置10实现通信。
[0045]
照相机22被搭载于自动驾驶车辆20。照相机22能够拍摄自动驾驶车辆20的车内影像以及车外影像。在图3中示出了1台照相机22,但也可以是多个照相机22被搭载于自动驾驶车辆20。在多个照相机22被搭载于自动驾驶车辆20的情况下,可以在自动驾驶车辆20搭载拍摄车内影像的照相机22和拍摄车外影像的照相机22。
[0046]
控制装置23包括至少1个处理器、至少1个专用电路、或者它们的组合。处理器是cpu或gpu等通用处理器、或者为了特定的处理定制的专用处理器。专用电路例如是fpga或者asic。控制装置23控制自动驾驶车辆20的各部来执行与自动驾驶车辆20的动作有关的处理。
[0047]
ecu24从被搭载于自动驾驶车辆20的各种传感器收集与自动驾驶车辆20相关的各种车辆信息。ecu24将收集到的车辆信息输出至控制装置23。ecu24收集的车辆信息例如可以包括能判定自动驾驶车辆20的故障的种类的信息、以及能判定自动驾驶车辆20的故障的程度的信息等。另外,ecu24收集的车辆信息可以包括速度数据、加速度数据以及位置数据等信息。在图3中示出了1个ecu24,但可以是多个ecu24搭载于自动驾驶车辆20。
[0048]
位置信息取得装置25包括与任意的卫星定位系统对应的1个以上的接收器。例如,位置信息取得装置25可以包括gps接收器。位置信息取得装置25取得自动驾驶车辆20的位置的测定值作为位置信息。位置信息例如包括地址、纬度、经度以及高度等。
[0049]
输出装置26包括向自动驾驶车辆20的乘客通知信息的1个以上的输出用接口。例如,输出装置26包括通过图像输出信息的显示器、通过声音输出信息的扬声器等,但并不限定于此。
[0050]
紧急按钮27是能够将自动驾驶车辆20运行停止了这一情况通知给信息处理装置10的按钮。紧急按钮27设置于自动驾驶车辆20的车内。
[0051]
参照图4对本公开的实施方式所涉及的终端装置30的构成进行说明。
[0052]
终端装置30具备通信部31、存储部32、输入部33、输出部34以及控制部35。
[0053]
通信部31包括与网络40连接的通信模块。例如,通信部31可以包括与lte、4g以及5g等移动通信标准对应的通信模块。在一个实施方式中,终端装置30经由通信部31与网络40连接。通信部31经由网络40来发送以及接收多种信息。通信部31能够经由网络40来与信息处理装置10通信。
[0054]
存储部32例如是半导体存储器、磁存储器或者光存储器等,但并不限定于这些。存储部32例如可以作为主存储装置、辅助存储装置或者缓存来发挥功能。存储部32存储在终端装置30的动作中使用的任意的信息。例如,存储部32可以存储系统程序、应用程序以及由通信部31接收到的各种信息等。存储于存储部32的信息例如能够通过经由通信部31从网络40接收的信息来进行更新。存储部32的一部分也可以设置于终端装置30的外部。该情况下,设置于外部的存储部32的一部分可以经由任意的接口来与终端装置30连接。
[0055]
输入部33包括检测用户输入并取得基于用户的操作的输入信息的1个以上的输入用接口。例如,输入部33是物理键、静电电容键、与输出部34的显示器一体设置的触摸屏、或者受理声音输入的话筒等,但并不限定于这些。
[0056]
输出部34包括输出信息来通知给用户的1个以上的输出用接口。例如,输出部34包括通过图像输出信息的显示器、通过声音输出信息的扬声器等,但并不限定于此。
[0057]
控制部35包括至少1个处理器、至少1个专用电路、或者它们的组合。处理器是cpu或gpu等通用处理器、或者为了特定的处理定制的专用处理器。专用电路例如是fpga或者asic。控制部35控制终端装置30的各部来执行与终端装置30的动作有关的处理。
[0058]
(信息处理系统的动作)
[0059]
参照图1~图4对图1所示的信息处理系统1的动作进行说明。
[0060]
如上述那样,自动驾驶车辆20例如是通过自动驾驶运行的路线巴士、或者通过自动驾驶运行的观光巴士等。
[0061]
自动驾驶车辆20的位置信息取得装置25时常取得自动驾驶车辆20的位置信息。控制装置23将位置信息取得装置25所取得的自动驾驶车辆20的位置信息经由通信装置21发送至信息处理装置10。控制装置23也可以例如按规定的时间间隔将自动驾驶车辆20的位置信息发送至信息处理装置10。
[0062]
自动驾驶车辆20的ecu24时常收集自动驾驶车辆20的车辆信息。车辆信息例如包括能判定自动驾驶车辆20的故障的种类的信息、以及能判定自动驾驶车辆20的故障的程度的信息等。控制装置23将ecu24收集到的自动驾驶车辆20的车辆信息经由通信装置21发送至信息处理装置10。控制装置23可以例如按规定的时间间隔将自动驾驶车辆20的车辆信息发送至信息处理装置10。
[0063]
自动驾驶车辆20的照相机22时常拍摄自动驾驶车辆20的车内影像以及车外影像。控制装置23将照相机22拍摄到的自动驾驶车辆20的车内影像以及车外影像经由通信装置21发送至信息处理装置10。控制装置23可以例如按规定的时间间隔将自动驾驶车辆20的车内影像以及车外影像发送至信息处理装置10。
[0064]
信息处理装置10的通信部11接收自动驾驶车辆20发送出的自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影像。控制部15经由通信部11取得自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影像。控制部15将所取得的自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影像存储于存储部12。
[0065]
若自动驾驶车辆20发生运行停止,则控制部15从存储部12取得此时的自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影像。控制部15例如可以取得判定为自动驾驶车辆20发生了运行停止时的、前后规定期间量的位置信息、车辆信息、车内影像以及车外影像。控制部15例如可以取得判定为自动驾驶车辆20发生了运行停止时的前后15秒钟的、自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影像。
[0066]
控制部15例如可以根据在自动驾驶车辆20中紧急按钮27被按压了来判定为自动驾驶车辆20发生了运行停止。若紧急按钮27被按压,则自动驾驶车辆20的控制装置23将表示紧急按钮27被按压了的信息经由通信装置21发送至信息处理装置10。
[0067]
或者,控制部15可以基于从自动驾驶车辆20取得的自动驾驶车辆20的车辆信息来判定为自动驾驶车辆20发生了运行停止。或者,控制部15可以基于来自乘坐在自动驾驶车辆20的乘务员或者乘客等的通报来判定为自动驾驶车辆20发生了运行停止。
[0068]
当判定为在多个自动驾驶车辆20发生了运行停止的情况下,控制部15基于从各自动驾驶车辆20取得的各自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影像来
决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0069]
控制部15将所决定的优先顺位的信息经由通信部11发送至救援队的终端装置30。此时,控制部15将各自动驾驶车辆20的位置信息与所决定的优先顺位的信息一同经由通信部11发送至救援队的终端装置30。另外,控制部15可以还将各自动驾驶车辆20的车辆信息、车内影像以及车外影像经由通信部11发送至救援队的终端装置30。
[0070]
终端装置30的通信部31接收信息处理装置10发送出的优先顺位的信息。控制部35经由通信部31取得优先顺位的信息。控制部35使输出部34输出所取得的优先顺位的信息。
[0071]
救援队确认输出部34输出的优先顺位的信息,能够基于确认了的优先顺位来奔向运行停止的自动驾驶车辆20。
[0072]
<基于乘坐人数的优先顺位的决定>
[0073]
控制部15可以基于乘坐在自动驾驶车辆20的乘坐人数来决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0074]
控制部15基于从自动驾驶车辆20取得的车内影像来判定自动驾驶车辆20的乘坐人数。控制部15例如可以通过对车内影像进行图像解析来判定自动驾驶车辆20的乘坐人数。
[0075]
当判定为在多个自动驾驶车辆20中发生了运行停止的情况下,控制部15以乘坐人数多的自动驾驶车辆20的优先顺位变高的方式决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0076]
这样,通过提高乘坐人数多的自动驾驶车辆20的优先顺位,能够使救援队优先赶到乘坐人数多的自动驾驶车辆20。
[0077]
<基于道路的宽度的优先顺位的决定>
[0078]
控制部15可以基于自动驾驶车辆20因运行停止而停止了的道路的宽度来决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0079]
控制部15基于从自动驾驶车辆20取得的位置信息以及车外影像的至少一个来判定自动驾驶车辆20所停止的道路的宽度。控制部15例如可以将从自动驾驶车辆20取得的位置信息与存储部12所存储的道路信息进行对照来判定自动驾驶车辆20所停止的道路的宽度。或者,控制部15例如可以通过对从自动驾驶车辆20取得的车外影像进行图像解析来判定自动驾驶车辆20所停止的道路的宽度。
[0080]
当判定为在多个自动驾驶车辆20中发生了运行停止的情况下,控制部15以所停止的道路的宽度狭窄的自动驾驶车辆20的优先顺位变高的方式决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0081]
这样,通过提高所停止的道路的宽度狭窄的自动驾驶车辆20的优先顺位,能够使救援队优先赶到停止在对其他汽车的行驶影响大的场所的自动驾驶车辆20。
[0082]
<基于车道的种类的优先顺位的决定>
[0083]
控制部15可以基于自动驾驶车辆20因运行停止而停止了的车道的种类来决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0084]
控制部15基于从自动驾驶车辆20取得的位置信息以及车外影像的至少一个来判定自动驾驶车辆20所停止的车道的种类。控制部15例如可以将从自动驾驶车辆20取得的位置信息与存储部12所存储的道路信息进行对照来判定自动驾驶车辆20所停止的车道的种
类。或者,控制部15例如可以通过对从自动驾驶车辆20取得的车外影像进行图像解析来判定自动驾驶车辆20所停止的车道的种类。
[0085]
当在多个自动驾驶车辆20中判定为发生了运行停止的情况下,控制部15以所停止的车道的种类是超车车道的自动驾驶车辆20的优先顺位高于所停止的车道的种类是行驶车道的自动驾驶车辆20的方式决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0086]
这样,通过提高停止在超车车道的自动驾驶车辆20的优先顺位,能够使救援队优先赶到停止在对汽车的行驶影响大的场所的自动驾驶车辆20。
[0087]
<基于故障的种类的优先顺位的决定>
[0088]
控制部15可以基于自动驾驶车辆20的故障的种类来决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0089]
控制部15基于从自动驾驶车辆20取得的车辆信息来判定自动驾驶车辆20的故障的种类。
[0090]
当判定为在多个自动驾驶车辆20中发生了运行停止的情况下,控制部15以故障的种类是与行驶功能相关的故障的自动驾驶车辆20的优先顺位变高的方式决定救援队奔向多个自动驾驶车辆20的优先顺位。与行驶功能相关的故障例如是与自动驾驶车辆20的行驶、转弯、停车等功能关联的故障。
[0091]
这样,通过提高故障的种类是与行驶功能相关的故障的自动驾驶车辆20的优先顺位,能够使救援队优先赶到发生了行驶、转弯、停车等那样的重大故障的自动驾驶车辆20。
[0092]
<基于故障的修理所需的时间的优先顺位的决定>
[0093]
控制部15可以基于自动驾驶车辆20的故障的修理所需的时间来决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0094]
控制部15基于从自动驾驶车辆20取得的车辆信息来推断自动驾驶车辆20的故障的修理所需的时间。
[0095]
当判定为在多个自动驾驶车辆20中发生了运行停止的情况下,控制部15以故障的修理所需的时间短的自动驾驶车辆20的优先顺位变高的方式决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0096]
这样,通过提高故障的修理所需的时间短的自动驾驶车辆20的优先顺位,能够使救援队优先赶到短时间就可修复的自动驾驶车辆20。
[0097]
<使用了加权的优先顺位的决定>
[0098]
控制部15可以通过对乘坐人数、道路的宽度、车道的种类、故障的种类以及故障的修理所需的时间分别乘以加权系数并将相乘所得的结果相加来计算用于决定优先顺位的优先顺位指数。
[0099]
控制部15以优先顺位指数大的自动驾驶车辆20的优先顺位变高的方式决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0100]
这样,通过提高优先顺位指数大的自动驾驶车辆20的优先顺位,能够使救援队优先赶到在综合评价了多个指标上优先级高的自动驾驶车辆20。
[0101]
其中,在上述的例子中,控制部15基于乘坐人数、道路的宽度、车道的种类、故障的种类以及故障的修理所需的时间来计算优先顺位指数,但控制部15可以不基于这些全部来计算优先顺位指数。例如,控制部15可以选择乘坐人数、道路的宽度、车道的种类、故障的种
类以及故障的修理所需的时间中的几个指标来计算优先顺位指数。
[0102]
<救援队的抵达预料时刻的显示>
[0103]
信息处理装置10的控制部15若将优先顺位的信息发送至终端装置30,则可以推断救援队向各自动驾驶车辆20的抵达预料时刻,并将推断出的抵达预料时刻经由通信部11发送至自动驾驶车辆20。
[0104]
自动驾驶车辆20的控制装置23若经由通信装置21取得信息处理装置10发送出的抵达预料时刻,则使输出装置26输出抵达预料时刻。
[0105]
由此,自动驾驶车辆20的乘客能够预测救援队抵达的时刻。
[0106]
<医生的派遣>
[0107]
在从自动驾驶车辆20的乘务员或者乘客取得了运行停止的原因是存在急发病的乘客这一信息的情况下,信息处理装置10的控制部15可以向位于自动驾驶车辆20的附近的医生的终端装置发送请求奔向自动驾驶车辆20的信息。医生的位置信息可以由存储部12存储。
[0108]
<运行停止时的控制>
[0109]
在自动驾驶车辆20运行停止的情况下,自动驾驶车辆20的控制装置23可以以自动驾驶车辆20的门能手动开闭的方式控制自动驾驶车辆20的门。由此,自动驾驶车辆20的乘客能够手动打开门来向外走出。
[0110]
当自动驾驶车辆20在铁路道口等危险场所运行停止的情况下,自动驾驶车辆20的控制装置23可以使输出装置26输出催促向车外走出来避难的消息。
[0111]
参照图5所示的流程图来对信息处理系统1的动作进行说明。
[0112]
在步骤s101中,信息处理装置10的控制部15时常判定自动驾驶车辆20是否发生了运行停止。
[0113]
在没有判定为自动驾驶车辆20发生了运行停止的情况下(步骤s101的“否”),控制部15反复进行步骤s101的处理。在判定为自动驾驶车辆20发生了运行停止的情况下(步骤s101的“是”),控制部15进入至步骤s102。
[0114]
在步骤s102中,控制部15取得自动驾驶车辆20发生了运行停止时的自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影像。
[0115]
在步骤s103中,控制部15对是否在多个自动驾驶车辆20中发生了运行停止进行判定。
[0116]
当没有判定为在多个自动驾驶车辆20中发生了运行停止的情况下(步骤s103的“否”),控制部15不决定优先顺位而结束处理。当判定为在多个自动驾驶车辆20中发生了运行停止的情况下(步骤s103的“是”),控制部15进入至步骤s104。
[0117]
在步骤s104中,控制部15基于从各自动驾驶车辆20取得的各自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影像来决定救援队奔向多个自动驾驶车辆20的优先顺位。
[0118]
在步骤s105中,控制部15将所决定的优先顺位的信息经由通信部11发送至救援队的终端装置30。
[0119]
如上述那样,在本实施方式所涉及的信息处理装置10中,若在自动驾驶车辆20发生运行停止,则控制部15取得自动驾驶车辆20的位置信息、车辆信息、车内影像以及车外影
像。而且,当在多个自动驾驶车辆20发生了运行停止的情况下,控制部15基于位置信息、车辆信息、车内影像以及车外影像来决定救援队奔向多个自动驾驶车辆20的优先顺位。由此,救援队能够按恰当的优先顺位奔向运行停止的自动驾驶车辆20。因此,根据本实施方式所涉及的信息处理装置10,当在多个自动驾驶车辆20发生了运行停止的情况下,能够恰当地决定救援队赶往的优先顺位。
[0120]
本公开并不限定于上述的实施方式。例如,可以将框图所记载的多个框统一,或者也可以将1个框分割。可以代替根据记述来按时间序列执行流程图所记载的多个步骤,而根据执行各步骤的装置的处理能力、或者根据需要来并列或者按不同的顺序执行流程图所记载的多个步骤。除此之外,能够在不脱离本公开主旨的范围内实现变更。
[0121]
例如,上述的实施方式中在信息处理装置10执行的一部分处理动作可以在自动驾驶车辆20或者终端装置30执行。另外,上述的实施方式中在自动驾驶车辆20或者终端装置30执行的一部分处理动作可以在信息处理装置10执行。
[0122]
例如,还能够构成为使智能手机或者计算机等通用的电子设备作为上述的实施方式所涉及的信息处理装置10发挥功能。具体而言,还可考虑将记述有实现实施方式所涉及的信息处理装置10等各功能的处理内容的程序储存于电子设备的存储器,由电子设备的处理器读出该程序来执行。因此,一个实施方式所涉及的公开还能够实现为处理器可执行的程序。
[0123]
例如,在上述的实施方式中,举出了自动驾驶车辆20是路线巴士或者观光巴士等情况为例进行了说明,但自动驾驶车辆20也可以是其他车辆。
[0124]
例如,在上述的实施方式中,说明了通过对车内影像进行图像解析来判定自动驾驶车辆20的乘坐人数的情况,但在车辆信息包括悬架的下沉状况的信息的情况下,可以基于悬架的下沉状况来判定自动驾驶车辆20的乘坐人数。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。