技术特征:
1.一种机器人清洁器,所述机器人清洁器包括:清洁器主体,所述清洁器主体配备有控制单元和驱动轮,所述驱动轮的驱动由所述控制单元控制;清洁管嘴,所述清洁管嘴安装在所述清洁器主体的下部中向下开口的开口部分内部,并且被构造成根据所述清洁器主体在上面行进的清洁表面的高度的改变来相对于所述清洁器主体上升或下降;多个上升/下降引导件,所述多个上升/下降引导件包括在所述清洁管嘴中并且被构造成引导所述清洁管嘴的上升或下降;以及多个支撑部分,所述多个支撑部分包括在所述清洁器主体中,并且被构造成分别支撑所述多个上升/下降引导件,使得所述多个上升/下降引导件分别穿过所述多个支撑部分,并且在向上或向下方向上移动。2.根据权利要求1所述的机器人清洁器,所述机器人清洁器还包括卡钩,所述卡钩设置成分别从所述多个上升/下降引导件的上端部突出,并且当所述多个上升/下降引导件下降使得所述清洁管嘴被悬挂在所述清洁器主体的上部上时,所述卡钩分别卡在所述多个支撑部分上。3.根据权利要求1所述的机器人清洁器,所述机器人清洁器还包括:多个辅助上升/下降引导件,所述多个辅助上升/下降引导件包括在所述清洁管嘴中,所述多个辅助上升/下降引导件布置在所述多个上升/下降引导件下方,并被构造成引导所述清洁管嘴的竖直上升或下降;以及多个引导件容纳单元,所述多个引导件容纳单元包括在所述清洁器主体中,所述多个引导件容纳单元与所述多个辅助上升/下降引导件的两个侧表面面接触,并且被构造成引导所述多个辅助上升/下降引导件的竖直上升或下降。4.根据权利要求1所述的机器人清洁器,其中,所述清洁管嘴包括被构造成容纳刷子模块的刷子容纳单元,并且所述多个辅助上升/下降引导件设置成从所述刷子容纳单元的上部突出。5.根据权利要求1所述的机器人清洁器,其中,所述清洁管嘴包括刷子模块,并且所述多个上升/下降引导件设置成分别从所述清洁管嘴的前部和后部在向上方向上突出,其中所述刷子模块插设在所述清洁管嘴的前部和后部之间。6.根据权利要求1所述的机器人清洁器,其中,所述清洁管嘴包括:管嘴基部,所述管嘴基部包括与所述开口部分连通的抽吸入口,并且包括分别位于所述管嘴基部的两端处的轴支撑部分,其中,所述轴支撑部分以能够旋转的方式在向下方向上支撑经由所述抽吸入口暴露的刷子模块;以及管嘴盖,所述管嘴盖联接到所述管嘴基部的上部以覆盖所述刷子模块。7.根据权利要求6所述的机器人清洁器,其中,所述管嘴盖包括:刷子容纳单元,所述刷子容纳单元被构造成在周向方向上覆盖并容纳所述刷子模块;以及凸缘单元,所述凸缘单元沿着所述刷子容纳单元的边缘延伸并且联接到所述管嘴基部,其中,所述多个上升/下降引导件设置成从所述凸缘单元的上表面突出,并且在所述刷
子容纳单元的向前/向后方向上彼此间隔开地布置。8.根据权利要求1所述的机器人清洁器,其中,所述多个上升/下降引导件分别设置在所述清洁管嘴的左侧和右侧处,并且被构造成引导所述清洁管嘴的左侧和右侧的端部独立地上升或下降。9.根据权利要求1所述的机器人清洁器,所述机器人清洁器还包括管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴,并被构造成容纳所述清洁管嘴,其中,所述多个支撑部分在所述管嘴容纳单元中设置成在向上/向下方向上被穿透,使得所述多个支撑部分分别在向上方向上被所述多个上升/下降引导件穿透。10.根据权利要求6所述的机器人清洁器,其中,所述管嘴盖包括:刷子容纳单元,所述刷子容纳单元被构造成在周向方向上覆盖并容纳所述刷子模块;凸缘单元,所述凸缘单元沿所述刷子容纳单元的边缘延伸并且联接到所述管嘴基部;以及多个辅助上升/下降引导件,所述多个辅助上升/下降引导件分别布置在所述多个上升/下降引导件下方,所述多个辅助上升/下降引导件设置成从所述凸缘单元的前表面突出,并且被构造成引导所述清洁管嘴的竖直上升或下降。11.根据权利要求3所述的机器人清洁器,所述机器人清洁器还包括管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴,并被构造成容纳所述清洁管嘴,其中,所述多个引导件容纳单元包括引导凹槽,所述多个辅助上升/下降引导件滑入所述引导凹槽中,并且所述多个引导件容纳单元设置成分别从所述管嘴容纳单元的前表面和后表面突出,以覆盖所述多个辅助上升/下降引导件。12.根据权利要求6所述的机器人清洁器,其中,所述清洁管嘴包括:刷子模块,所述刷子模块被构造成经由所述开口部分扫除所述清洁表面上的异物;抽吸引导件,所述抽吸引导件安装成在所述管嘴基部的下部中向下倾斜,并被构造成接收和升高由所述刷子模块扫除的异物;以及抽吸引导件保持器,所述抽吸引导件保持器联接到所述管嘴基部的下部以固定所述抽吸引导件,其中所述抽吸引导件布置在所述管嘴基部的下部和所述抽吸引导件保持器之间。13.根据权利要求1所述的机器人清洁器,所述机器人清洁器还包括:管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴;排放出口,所述排放出口设置在所述清洁管嘴的后部中,并且被构造成排放经由所述开口部分抽吸的异物;连通部,所述连通部设置在所述管嘴容纳单元的后部中以与所述排放出口连通;以及抽吸流动路径部,所述抽吸流动路径部被构造成将所述排放出口与所述连通部连通,并且所述抽吸流动路径部包括弹性材料以弹性地支撑所述清洁管嘴,使得所述清洁管嘴能够上升或下降。14.根据权利要求13所述的机器人清洁器,其中,当所述清洁管嘴由于所述清洁表面的高度而升高时,所述抽吸流动路径部将所述清洁管嘴弹性地按压到所述清洁管嘴的原始位
置。15.根据权利要求13所述的机器人清洁器,其中,所述抽吸流动路径部还包括紧固凸缘,所述紧固凸缘设置成从所述抽吸流动路径部的端部沿着周向方向在向外方向上突出,并且被紧固到所述连通部,其中,所述抽吸流动路径部延伸成从所述排放出口朝向后面方向突出。16.根据权利要求1所述的机器人清洁器,其中,所述清洁管嘴包括:刷子容纳单元,所述刷子容纳单元被构造成容纳刷子模块,所述刷子模块被构造成经由所述开口部分扫除所述清洁表面上的异物;以及刷子驱动部,所述刷子驱动部安装在所述刷子容纳单元的一侧的端部中,并且被构造成使所述刷子模块旋转。17.根据权利要求16所述的机器人清洁器,所述机器人清洁器还包括管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴,并被构造成容纳所述清洁管嘴,其中,所述管嘴容纳单元还包括被所述刷子驱动部穿透的贯通部分,使得从所述刷子容纳单元的端部朝向所述管嘴容纳单元的外部突出的所述刷子驱动部能够随所述清洁管嘴上升或下降。18.根据权利要求16所述的机器人清洁器,其中,所述清洁管嘴包括抽吸流动路径部,所述抽吸流动路径部延伸成从所述刷子容纳单元的排放出口在后面方向上突出以排放异物,并且所述抽吸流动路径部被构造成弹性地支撑所述清洁管嘴以校正所述刷子驱动部上的不对称负荷。19.根据权利要求18所述的机器人清洁器,其中,所述抽吸流动路径部以闭环的形式设置。20.根据权利要求18所述的机器人清洁器,其中,所述抽吸流动路径部包括弹性材料,并且还包括加强部分,所述加强部分设置成使得厚度沿着所述抽吸流动路径部的靠近所述刷子驱动部的区段的内周进一步增加。21.根据权利要求18所述的机器人清洁器,其中,所述抽吸流动路径部包括弹性材料,并且还包括多个加强肋,所述多个加强肋沿着所述抽吸流动路径部的靠近所述刷子驱动部的区段的外周的表面彼此间隔开地布置,并且所述多个加强肋设置成在向外方向上突出。22.一种机器人清洁器,所述机器人清洁器包括:清洁器主体,所述清洁器主体配备有控制单元和驱动轮,所述驱动轮的驱动由所述控制单元控制;清洁管嘴,所述清洁管嘴安装在所述清洁器主体的下部中向下开口的开口部分内部,并且被构造成根据所述清洁器主体在上面行进的清洁表面的高度的改变来相对于所述清洁器主体上升或下降;管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴的上部;刷子模块,所述刷子模块安装成容纳在所述清洁管嘴中;刷子驱动部,所述刷子驱动部安装在所述清洁管嘴的一侧的端部中,并被构造成驱动所述刷子模块;以及
抽吸流动路径部,所述抽吸流动路径部将所述清洁管嘴连接到所述管嘴容纳单元,以抽吸由所述刷子模块扫除的异物,并且所述抽吸流动路径部被构造成弹性地支撑所述清洁管嘴上升或下降,并校正所述刷子驱动部上的不对称负荷。
技术总结
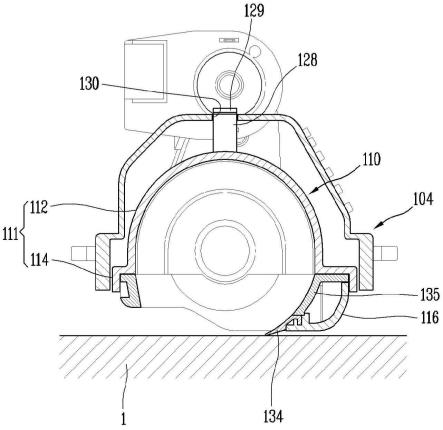
本发明涉及一种机器人清洁器。机器人清洁器包括:清洁器主体,其配备有驱动轮;以及清洁管嘴,其在清洁器主体的下部中的向下开口的开口部分内部安装成能够上升和下降。清洁管嘴可由多个上升/下降引导件和多个辅助上升/下降引导件支撑,使得清洁管嘴可根据清洁器主体在上面行进的清洁表面的高度的改变相对于清洁器主体上升和下降。因此,清洁管嘴在被可压缩地板例如地毯按压时升高,从而解决了清洁管嘴卡在清洁表面上的问题。因此,能够提高行进性能,并且能够减小刷子驱动部上的负荷。并且能够减小刷子驱动部上的负荷。并且能够减小刷子驱动部上的负荷。
技术研发人员:洪禹 李尚益
受保护的技术使用者:LG电子株式会社
技术研发日:2020.11.03
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。