1.本发明涉及电力系统安全稳定控制技术领域,特别是涉及一种基于线性自抗扰控制的双馈风电场次同步振荡抑制方法。
背景技术:
2.双馈风电场经串联补偿线路并网容易产生次同步振荡(sso),此类sso主要是双馈风机换流器和串联补偿线路之间的相互耦合引起的,不涉及机组轴的扭转振动,所以被称为次同步控制相互作用(ssci)。此类振荡如果不加控制,将导致风机脱网、设备损坏和其他电能质量问题,严重威胁到电力系统的安全稳定运行。
3.对于ssci已有相关文献进行研究,现有抑制ssci的控制策略大致可分为风电机组侧控制和风电场侧控制。风电场侧控制主要采用柔性交流输电设备附加阻尼控制来抑制振荡。文献-王玉芝,王亮,姜齐荣.基于statcom的风电场ssci附加阻尼抑制策略采用基于线性自抗扰控制的静止无功补偿器抑制弱交流风电系统中的次同步振荡。文献-rajaram t,reddy j m,xu y.kalman filter based detection and mitigation of subsynchronous resonance with sssc[j].ieee transactions on power systems,基于滤波环节、增益环节和相位补偿环节设计基于静止同步无功补偿器(statcom)的阻尼控制器,使statcom能够在宽频带范围内提供正阻尼。文献-moharana a,varma r k,seethapathy r.ssr alleviation by statcom in induction-generator-based wind farm connected to series compensated line针对静止同步串联补偿器(sssc)采用卡尔曼阻尼控制器来抑制次同步振荡,卡尔曼阻尼控制器的设计基于阻尼转矩在扭转模态频率范围内的大小,应用遗传算法对控制器参数进行优化。文献-ling j,ji h,yu c,et al.analysis and design of upfc sub-synchronous oscillation controller提出了一种基于模态控制的统一潮流控制器(upfc)的次同步振荡阻尼控制器,在有效控制潮流的基础上,抑制次同步振荡。然而,柔性交流输电设备价格昂贵,增加额外的柔性交流输电设备对风电场来说不是一个经济的解决方案。
[0004]
风电机组控制主要通过对传统的风机换流器进行调整参数或改进控制实现对sso的抑制,包括优化换流器参数和改进换流器控制策略。ssci与转子侧变换器(rsc)电流环的比例积分(pi)控制器密切相关。当扰动发生时,定子谐振电流在双馈电机转子中引起相应的次同步电流。然后由rsc电流环的pi控制器调节输出电压。但调整后的输出电压会增加次同步电流,增大扰动,导致ssci。因此,通过对双馈风机变换器pi控制器参数的整定,提出了一些抑制措施。文献-wang l,xie x,jiang q,et al.investigation of ssr in practical dfig-based wind farms connected to a series-compensated power system提出了一种减小rsc电流环比例增益的阻尼方法。为了抑制ssci,文献-chen a,xie d,zhang d,et al.pi parameter tuning of converters for sub-synchronous interactions existing in grid-connected dfig wind turbines利用非支配排序遗传算法对换流器pi参数进行优化。但是,调整控制参数可能破坏原有的控制性能,并且抑制能
力有限。为了克服这些困难,基于带通滤波器的次同步阻尼控制器被应用到换流器的电流环中来抑制ssci。将抑制信号引入转子侧换流器内环控制或网侧换流器功率外环控制,从而达到在风机侧抑制ssci的目的。但ssci的振荡特性是由风机控制系统和输电线路参数决定的,其振荡频率不固定。当系统运行条件发生变化时,ssci振荡频率会发生偏移,带通滤波器的参数和移相环节参数必须重新设置。此外,由于设计和实施的复杂性,采用复杂的高级非线性控制并不合理可行。
技术实现要素:
[0005]
本发明通过线性自抗扰控制(ladrc)引入风机转子侧环流器取代pi控制器。通过ladrc中线性扩张状态观测器(leso)实现对风电系统产生的sso的估计和反馈。然后,在ladrc中的线性状态误差反馈(lsef)中引入高通滤波器以抑制低频振荡,所设计控制器hpf-ladrc在提升系统振荡频段阻尼的同时增强系统抗扰动能力。
[0006]
本发明提供一种基于线性自抗扰控制的双馈风电场次同步振荡抑制方法,具体方案如下:
[0007]
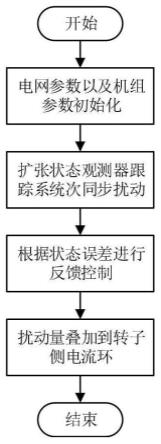
一种基于线性自抗扰控制的双馈风电场次同步振荡抑制方法,包括以下步骤:
[0008]
步骤一:对电网参数和机组参数进行初始化操作;
[0009]
步骤二:扩张状态观测器跟踪系统进行次同步扰动;
[0010]
步骤三:根据状态误差进行反馈控制;
[0011]
步骤四:扰动量叠加到转子侧电流环,进行双馈风电场次同步振荡抑制。
[0012]
优选地,所述步骤2具体为:
[0013]
确定高通滤波器的传函,通过下式表示高通滤波器的传函:
[0014][0015]
其中,ξ是阻尼系数,ωn=2πfc,是滤波器角频率,andh0代表增益;
[0016]
其中leso如公式(2)所示,通过下式表示leso:
[0017][0018]
其中,^表示估计值,h1和h2是leso的增益;
[0019]
确定观测器带宽和观测器增益之间的关系,通过下式表示观测器带宽和观测器增益之间的关系:
[0020][0021]
确定设计的控制器的控制率,通过下式表示控制率:
[0022][0023][0024]
其中,ω
eso
是观测器带宽,u0是系统给定参考变量。
[0025]
优选地,所述步骤三具体为:
[0026]
对公式(2)进行拉普拉斯变换
[0027][0028]
将公式(6)带入公式(5)中得到u0:
[0029][0030]
将公式(6)、(7)带入公式(4)中,得到系统控制量,确定系统参考变量与系统输出之间的关系,通过下式表示系统参考变量与系统输出之间的关系:
[0031][0032]
优选地,所述步骤4具体为:根据控制器进行简化控制,通过下式进行简化控制:
[0033][0034]
确定系统闭环传递函数,通过下式表示系统闭环传递函数:
[0035][0036]
根据扰动量叠加到转子侧电流环,进行双馈风电场次同步振荡抑制。
[0037]
有益效果:
[0038]
本发明提供了一种基于线性自抗扰的双馈风电场次同步振荡抑制方法,本发明中leso对系统的次同步扰动进行实时估计和反馈补偿。然后,在lesf中加入高频滤波器来抑制低频振荡。所设计的hpf-ladrc不需要复杂的参数调整,对系统参数变化具有良好的抗干扰能力。最后,阻抗分析和时域仿真验证了hpf-ladrc抑制次同步振荡的有效性。
附图说明
[0039]
图1为发明流程图;
[0040]
图2为抑制次同步振荡的hpf-ladrc控制器;
[0041]
图3为hpf-ladrc简化框图;
[0042]
图4为双馈风电场仿真模型;
[0043]
图5为有功功率对比图;
[0044]
图6为系统阻抗对比图。
具体实施方式
[0045]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本
发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0046]
结合图1至图6所示,本发明提供一种基于线性自抗扰控制的双馈风电场次同步振荡抑制方法,包括以下步骤:
[0047]
步骤一:对电网参数和机组参数进行初始化操作;
[0048]
步骤二:扩张状态观测器跟踪系统进行次同步扰动;
[0049]
所述步骤2具体为:
[0050]
确定高通滤波器的传函,通过下式表示高通滤波器的传函:
[0051][0052]
其中,ξ是阻尼系数,ωn=2πfc,是滤波器角频率,andh0代表增益;
[0053]
其中leso如公式(2)所示,通过下式表示leso:
[0054][0055]
其中,^表示估计值,h1和h2是leso的增益;
[0056]
确定观测器带宽和观测器增益之间的关系,通过下式表示观测器带宽和观测器增益之间的关系:
[0057][0058]
确定设计的控制器的控制率,通过下式表示控制率:
[0059][0060][0061]
其中,ω
eso
是观测器带宽,u0是系统给定参考变量。
[0062]
步骤三:根据状态误差进行反馈控制;
[0063]
所述步骤三具体为:
[0064]
对公式(2)进行拉普拉斯变换
[0065][0066]
将公式(6)带入公式(5)中得到u0:
[0067][0068]
将公式(6)、(7)带入公式(4)中,得到系统控制量,确定系统参考变量与系统输出之间的关系,通过下式表示系统参考变量与系统输出之间的关系:
[0069][0070]
步骤四:扰动量叠加到转子侧电流环,进行双馈风电场次同步振荡抑制。
[0071]
所述步骤4具体为:根据控制器进行简化控制,通过下式进行简化控制:
[0072][0073]
确定系统闭环传递函数,通过下式表示系统闭环传递函数:
[0074][0075]
根据扰动量叠加到转子侧电流环,进行双馈风电场次同步振荡抑制。
[0076]
具体实施例二:
[0077]
本发明在matlab/simulink中建立了双馈风电场经串补线路并网系统,通过时域仿真验证了所设计基于线性自抗扰控制的阻尼控制器的有效性。如图4所示。双馈风电场由66台双馈风机组成,每台风机额定电压为0.69kv,容量为1.5mw。风机由变压器生涯,并入220kv串补偿线路进行长距离传输。风电场系统仿真参数如表1所示。所设计控制器的参数见表2。
[0078]
表1.系统主要参数
[0079][0080]
表2 hpf-ladrc主要参数
[0081][0082]
本发明通过阻抗分析进一步验证了时域仿真的有效性。在仿真模型的电网连接点上依次注入小幅度谐波电流,进行阻抗分析。在谐波电流频率范围内分别对系统的发电侧
和电网侧进行频率扫描,建立系统的阻抗模型。系统的等效电阻和电抗随频率变化,并利用系统的频率-阻抗曲线验证了系统抑制振荡的能力。当系统的等效电抗曲线与x轴相交时,系统有一个振荡点。假设系统振荡频率对应的等效电阻小于零。在这种情况下,系统将发生次同步振荡,负电阻的绝对值越大,振荡越容易分散。
[0083]
时域仿真初始时风速为11m/s,双馈风机数量为66个。系统初始运行稳定,t=3s时串联接入系统,补偿程度30%。ssci发生在串联电容器接入时。仿真结果如图5(a)所示。由pi、ladrc和hpf-ladrc的功率曲线可以看出,串联电容的加入会产生不同程度的振荡。随着风电场的运行,pi、ladrc和hpf-ladrc的作用下,振荡得到了不同程度的抑制。与pi和ladrc相比,ladrc的功率曲线振荡幅度更小,收敛速度更快,阻尼性能更好。其他参数保持不变,只改变补偿程度。在不同补偿水平下测试hpf-ladrc抑制ssci的效果。仿真在40%和50%补偿程度下开始,如图5(b)和(c)所示。随着补偿程度的增加,振荡变得越来越严重。仿真结果表明,在40%和50%补偿程度下,pi不能抑制功率振荡,导致风电场振荡。随着补偿程度的增加,ladrc的减振效果变差,振荡收敛时间变长。功率曲线表明,hpf-ladrc具有较好的阻尼性能。
[0084]
基于系统阻抗分析验证了时域仿真结果。如图6(a)所示,f1、f2和f3是x
eq
在pi、ladrc和hpf-ladrc下电抗过零点。f1时,r
eq
(f1)为正,表明具有pi的风电场运行稳定。同理,当等效电抗为零时,r
eq
(f2)和r
eq
(f3)为正。系统的等效频率-阻抗曲线表明,hpf-ladrc阻抗曲线的等效电阻更大,能更好地抑制振荡。如图6(b)和(c)所示,在f1处,r
eq
(
f1
)为负,表示pi下的不稳定状态。当等效电抗为零时,r
eq
(f2)和r
eq
(f3)为正。hpf-ladrc的电阻大于ladrc的频率-阻抗曲线。基于系统阻抗的分析结果表明,在不同补偿水平下,hpf-ladrc的阻尼性能优于ladrc和pi。
[0085]
以上对本发明所提供的一种基于线性自抗扰控制的双馈风电场次同步振荡抑制方法,进行了详细介绍,本发明应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
