1.本发明涉及机器人的关节结构,特别涉及适合软体机器人(柔软的机器人)的机械手的关节结构。
背景技术:
2.工业用机器人一般由刚性高的机构构成机械手,一边通过传感器进行状态测量一边控制末端执行器的三维位置。然而,仅由刚性高的机构构成的机器人例如难以进行伴随与对象物接触的动作、要求比传感器的测量误差高的精度的动作等。作为解决这样的课题的方法,提出了所谓的软体机器人(柔软的机器人)这一方法。例如,在机器人的一部分设置受到外力而位移或变形的柔软机构,自动追随对象物的形状等。专利文献1、2所记载的顺从机构也是其一例。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开平5-192892号公报
6.专利文献2:日本特开平8-118281号公报
技术实现要素:
7.发明所要解决的技术问题
8.刚性高的机构和柔软的机构分别具有优缺点。因此,本发明人们为了实现在刚性高的机构与柔软的机构之间切换自如的混合机构而进行了研究。此外,在专利文献1、2所提出的顺从机构中,也搭载有切换能够进行顺从动作的自由状态和无法进行顺从动作的锁定状态的功能。然而,专利文献1、2的顺从机构的可动范围非常窄(能够进行水平面内的微小位移的程度),可适用的场景或用途是有限的。另外,由于在关节或连杆的内部设置有驱动锁定机构的致动器(气缸等),因此还存在导致关节或连杆的结构复杂化、大型化这一缺点。
9.本发明是鉴于上述实际情况而完成的,其目的在于提供一种能够利用简单且紧凑的结构切换锁定状态与具有大的可动范围的自由状态的机器人的关节结构。
10.用于解决问题的技术方案
11.本公开包含的关节结构将机器人的机械手的第一要素与第二要素之间连结,其特征在于,所述关节结构具有锁定机构,所述锁定机构进行所述第二要素相对于所述第一要素独立地自由运动的自由状态与所述第二要素被固定于所述第一要素的锁定状态的切换,所述锁定机构具有:第一部件,与所述第一要素接合;第二部件,与所述第二要素接合;以及具有挠性的线状部件,所述线状部件的一端安装于所述第二部件,另一端穿过设置于所述第一部件的贯通孔被引出至所述关节结构的外侧,通过拉拽所述线状部件而使所述第二部件与所述第一部件接触,从而成为所述锁定状态,通过使所述线状部件伸长而使所述第二部件与所述第一部件分离,从而成为所述自由状态。
12.根据该结构,可以通过拉拽线状部件而使第二部件与第一部件接触/使线状部件
伸长而使第二部件与第一部件分离这一极其简单的结构,实现锁定状态/自由状态的切换。另外,通过将线状部件的另一端引出至关节结构的外侧,可以将线状部件的驱动源配置于关节结构的外部。因此,能够紧凑且轻量地构成关节结构本身。此外,由于可以通过线状部件的延伸量(行程)来调整第一部件与第二部件的分离距离,因此,也可以容易地实现根据需要增大第一要素与第二要素之间的可动范围。
13.例如,也可以为,在所述自由状态下,所述第二部件与所述第一部件分离至如下程度:形成所述第二要素相对于所述第一要素独立地以六自由度自由运动的可动范围。六自由度的运动为x方向、y方向、z方向的平移和绕x轴、绕y轴、绕z轴的旋转。“形成第二要素相对于第一要素独立地以六自由度自由运动的可动范围的程度”是指例如“在将第一要素固定的状态下对第二要素施加六自由度的运动的情况下,第二要素不会受到第一要素的约束或者不会与第一要素产生物理干扰的程度”。根据本公开的锁定机构,通过适当设计线状部件的延伸量(行程)、或者第一部件和第二部件的形状,可以容易地实现这样大的可动范围的形成。
14.也可以为,所述关节结构还具有弹性部件,所述弹性部件将所述第一部件与所述第二部件之间连接。通过弹性部件的恢复力的作用,即使在自由状态下,第一要素与第二要素的相对姿势也稳定。另一方面,在外力作用于第二要素的情况下,由于弹性部件发生变形,因此不会阻碍第二要素的动作。因此,例如可以容易地实现使第二要素的前端沿着具有凹凸的表面移动这样的柔软的动作。
15.也可以为,所述弹性部件包含非线性弹簧要素,通过根据所述线状部件的拉拽量改变所述第一部件与所述第二部件之间的距离,从而使所述弹性部件的刚性可变。由此,可以控制自由状态下的关节结构的硬度(柔软度)。
16.也可以为,在所述第一部件和所述第二部件中的一方设置有凸部,并且在另一方设置有凹部,在所述锁定状态下,通过所述凸部嵌合于所述凹部,使所述第一部件与所述第二部件之间被固定。这样的嵌合方式适合于想要得到强的固定力的情况。
17.也可以为,所述凸部具有锥形状或锥台形状。即,侧面可以以越靠近凸部的前端越窄的方式倾斜。此外,凹部也可以具有与凸部的形状对应的形状。根据这样的凸部及凹部构成的嵌合结构,当逐渐拉拽线状部件而使第一部件与第二部件靠近时,凸部被凹部的内表面引导,从而自动以凸部与凹部的轴一致的方式被引导。因此,可以抑制嵌合失败(向锁定状态切换失败)。
18.也可以为,所述凸部具有圆锥形状或圆锥台形状。通过使用旋转对称形状的凸部,允许第一部件(第一要素)与第二部件(第二要素)之间的角度偏移(凸部的绕轴旋转),因此,可以更进一步抑制嵌合失败。此外,该情况下,也可以在所述凸部的侧面设置突起,在所述凹部设置引导所述突起的引导槽。根据该结构,当凸部被插入凹部时,突起被引导槽引导,凸部与凹部之间的角度偏移被自动地修正。因此,可以同时实现嵌合失败的抑制和角度偏移的防止。
19.所述凸部及所述凹部可以仅设置一组,所述凸部及所述凹部也可以设置多组。
20.也可以为,在所述第一部件和所述第二部件分别设置有相互平行的面,在所述锁定状态下,通过所述第一部件与所述第二部件面接触而使摩擦起作用,使所述第一部件与所述第二部件之间被固定。这样的摩擦方式适合于想要使关节结构更紧凑的情况。
21.本发明可以理解为具有上述构成的至少一部分的机器人的关节结构,也可以理解为固定机器人的机械手的要素的锁定机构、切换机器人的机械手的要素的自由状态与锁定状态的状态切换装置。另外,也可以理解为具有这样的关节结构、锁定机构或者状态切换装置的机器人的机械手或机器人。另外,本发明也可以理解为通过上述构成的关节结构固定机器人的机械手的要素的锁定方法、切换机器人的机械手的要素的自由状态与锁定状态的状态切换方法等。此外,上述各构成可以尽可能地相互组合而构成本发明。
22.发明效果
23.根据本发明,可以提供一种能够利用简单且紧凑的结构切换锁定状态与具有大的可动范围的自由状态的机器人的关节结构。
附图说明
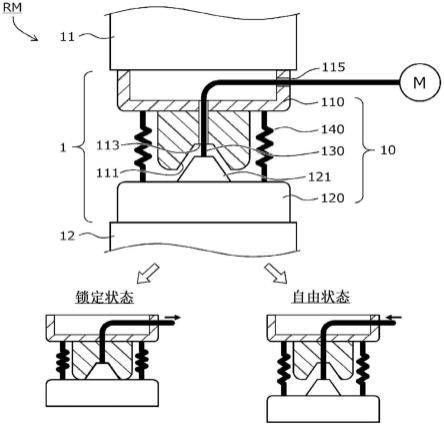
24.图1是具有锁定机构的关节结构的示意图。
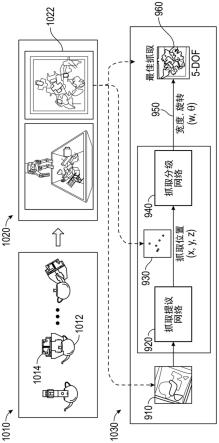
25.图2是表示机器人的整体构成的示意图。
26.图3a是关节结构的俯视图,图3b是图3a的a-a剖面(锁定状态),图3c是图3a的a-a剖面(自由状态),图3d是表示在自由状态的情况下外力作用于末端执行器时的动作的图。
27.图4是表示变形例1中使用的非线性弹簧的特性的图。
28.图5是表示变形例2的图。
29.图6是表示变形例3的图。
30.图7是表示变形例4的图。
具体实施方式
31.<适用例>
32.参照图1,对本发明的适用例之一进行说明。图1是具有锁定机构的机器人的关节结构的示意图。
33.该关节结构1是将构成机器人的机械手rm的第一要素11与第二要素12之间连结的装置。机械手rm是多关节的机械手,第一要素11是位于机械手rm的基端侧的要素,第二要素12是位于比第一要素11靠前端侧的要素。
34.关节结构1能够采取第二要素12相对于第一要素11独立地自由运动的自由状态和第二要素12被固定于第一要素11的锁定状态。该自由状态与锁定状态的切换通过锁定机构10实现。
35.锁定机构10大致具有与第一要素11接合的第一部件110、与第二要素12接合的第二部件120、具有挠性的线状部件130以及将第一部件110与第二部件120之间连接的多个弹性部件140。
36.第二部件120的中央部设置有凸部121,第一部件110的中央部设置有与凸部121对应的形状的凹部111。凹部111的底部和第一部件110的侧壁上分别形成有供线状部件130穿过的贯通孔113及引出孔115。线状部件130的一端固定于第二部件120的凸部121的顶点(上底的中心),另一端穿过贯通孔113及引出孔115被引出至关节结构1的外侧,并与驱动源m连接。
37.当通过驱动源m拉拽线状部件130时,凸部121与凹部111嵌合,第二部件120固定于
第一部件110,成为锁定状态。在该锁定状态下,第一要素11和第二要素12作为一个刚体行动。
38.当关闭驱动源m(或者通过驱动源m送出线状部件130)而使线状部件130伸长时,第二部件120与第一部件110分离,成为自由状态。使线状部件130伸长是指:在放松了施加于线状部件130的张力时,通过第二要素12的自重及锁定状态下被压缩的后述弹性部件140的恢复力中的至少任意一个,使线状部件130从贯通孔113向第二部件120侧引出的长度增加。在自由状态下,第二要素12相对于第一要素11独立地自由运动。由此,可以实现被称为软体机器人或顺从机构的所谓“柔软的机器人”。
39.驱动源m可以是线性电机或旋转电机。驱动源m可以通过电或流体压力进行驱动。驱动源m也可以取代对线状部件130施加拉拽力,而以决定线状部件130的引入长度的方式驱动线状部件130。
40.根据该结构,可以通过拉拽线状部件130而使第二部件120与第一部件110接触/使线状部件130伸长而使第二部件120与第一部件110分离这一极其简单的结构,实现锁定状态/自由状态的切换。另外,通过将线状部件130的另一端引出至关节结构1的外侧,可以将线状部件130的驱动源m配置于关节结构1的外部。因此,能够紧凑且轻量地构成关节结构1本身。此外,由于可以通过线状部件130的延伸量(行程)来调整第一部件110与第二部件120的分离距离,因此,还具有可以容易地实现根据需要来增大第一要素11与第二要素12之间的可动范围这一优点。
41.<实施方式>
42.参照图2,对本发明的实施方式涉及的机器人及其关节结构进行说明。图2是表示机器人的整体构成的示意图。
43.在本实施方式中,示出经由上述具备锁定机构的关节结构1将末端执行器e2安装于垂直多关节机器人r的机械手rm的例子。但是,这只不过是一个例子,机器人r的构成、种类并不限于图2的例子。具体而言,机器人r只要是具备至少一个以上的机械手的机器人便可为任何机器人,能够适用于工业用机器人、类人机器人、护理机器人、搬运机器人、家庭用机器人、手术支援机器人等各种机器人。其中,工业用机器人由于刚性机器人与软体机器人的切换有用的场景多,因此是能够良好适用关节结构1的机器人之一。此外,工业用机器人除了垂直多关节机器人以外还包括水平多关节机器人(scara机器人)、并联连杆机器人、正交机器人等。另外,关节结构1的适用位置并不限于末端执行器e2的连结部,也可以适用于连杆彼此的连结部。
44.本实施方式的机器人r具有机械手rm、控制器rc以及驱动源m来作为主要构成。机械手rm是具有多个连杆和将连杆彼此连结的关节(接头)且通过伺服电机驱动的多关节机械手。控制器rc是控制机械手rm的伺服电机及驱动源m的控制装置。
45.机械手rm的前端的连杆e1上经由关节结构1连结有末端执行器e2。在该例子中,连杆e1相当于图1的第一要素11,末端执行器e2相当于图1的第二要素12。驱动源m是用于驱动关节结构1的锁定机构的装置。驱动源m只要能够进行拉拽线状部件130的动作和送出线状部件130的动作,便可以为任意种类、结构,但需要可确保关节结构1为锁定状态时的刚性(连杆e1与末端执行器e2之间的固定力)的程度的拉拽力和可确保关节结构1为自由状态时的末端执行器e2的可动范围的程度的行程。例如,也可以将电机、液压致动器、气压致动器
等用作驱动源m。
46.图3a至图3d示出关节结构1的细节。图3a是从连杆e1侧观察的关节结构1的俯视图,图3b是图3a的a-a剖面(锁定状态),图3c是图3a的a-a剖面(自由状态),图3d是表示在自由状态的情况下外力作用于末端执行器e2时的动作的图。
47.关节结构1具有大致圆筒形状的第一部件110与大致圆盘形状的第二部件120通过多个弹性部件140连结的结构。在本实施方式的例子中,第一部件110和第二部件120同心地配置,两个部件110、120通过在周向上等间隔配置的三根螺旋弹簧连结。在锁定状态下,弹性部件140成为压缩状态,产生欲使第一部件110与第二部件120分离的恢复力。在第二部件120位于第一部件110的下方时,也通过第二部件120的自重产生欲使第一部件110与第二部件120分离的力。
48.第二部件120的中央部设置有圆锥台形状的凸部121,凸部121的侧面设置有突起(锁定销)122。在凸部121的上底形成有贯通孔123,线状部件130的一端插入并被固定于贯通孔123。在本实施方式中,线状部件130使用金属制的线。但是,作为线状部件130,也可以使用由化学纤维或天然纤维构成的电缆(绳索)。
49.第一部件110的中央部设置有与凸部121对应的形状的凹部111,凹部111的侧面设置有用于引导突起122并对其定位的引导槽112。在凹部111的底部形成有贯通孔113。线状部件130穿过贯通孔113并卷绕在第一部件110的中空内部设置的带轮114,并从形成于第一部件110的侧壁的引出孔115被引出至关节结构1的外部。此外,线状部件130穿过安装于第一部件110的外壁的挠性管(外壳)116的内部并与驱动源m连接。在关节结构1与驱动源m之间的线状部件130的路径中,至少呈曲线的部分的线状部件130穿过两端的位置被固定的非伸缩性的挠性管116之中,在对线状部件130施加了张力的状态下,关节结构1中的线状部件130根据驱动源m中的线状部件130的位移而进行位移。
50.在机器人r运转时,通过驱动源m拉拽线状部件130而将第二部件120向第一部件110侧拉近,直到第二部件120与第一部件110接触(碰撞)。于是,凸部121与凹部111嵌合,第二部件120被定位固定于第一部件110,成为锁定状态(图3b)。在该锁定状态下,连杆e1和末端执行器e2作为一个刚体行动。
51.另一方面,当关闭驱动源m(或者通过驱动源m送出线状部件130)而使线状部件130伸长时,通过第二部件120和末端执行器e2的自重或者弹性部件140的恢复力,使第二部件120从第一部件110分离,成为自由状态(图3c)。在自由状态下,成为末端执行器e2由三根螺旋弹簧悬挂的状态或支撑的状态,相对于连杆e1独立地以六自由度自由运动。六自由度的运动是x方向、y方向、z方向的平移和绕x轴、绕y轴、绕z轴的旋转(关节结构1的xyz坐标系例如以第一部件110(即连杆e1)的轴向为z轴的方式决定即可)。此时,当外力作用于末端执行器e2时,如图3d所示,仅末端执行器e2的位置或姿势能够变化。由此,可以实现被称为软体机器人或顺从机构的所谓“柔软的机器人”。
52.根据以上所述的本实施方式的关节结构1,可以通过极其简单的结构实现锁定状态/自由状态的切换。另外,由于将线状部件130的驱动源m配置于关节结构1的外部,因此能够紧凑且轻量地构成关节结构1本身。另外,可以容易地实现增大自由状态下的末端执行器e2的可动范围。
53.另外,在弹性部件140的恢复力的作用下,即使在自由状态下连杆e1与末端执行器
e2的相对姿势也稳定。另一方面,在外力作用于末端执行器e2的情况下,由于弹性部件140发生变形,因此不会阻碍末端执行器e2的动作。因此,例如,可以容易地实现使末端执行器e2的前端沿着具有凹凸的表面移动这样的柔软的动作。
54.另外,根据由圆锥台形状的凸部121和凹部111构成的嵌合结构,当逐渐拉拽线状部件130而使第一部件110与第二部件120靠近时,凸部121被凹部111的内表面引导,自动地以使凸部121与凹部111的轴一致的方式被引导。因此,可以抑制嵌合的失败(向锁定状态切换失败)。而且,若凸部121与凹部111嵌合,则可以得到强的固定力。
55.进而,通过在凸部121和凹部111设置突起122和引导槽112,在凸部121插入凹部111时,突起122被引导槽112引导,凸部121与凹部111之间的角度偏差被自动地修正。因此,可以同时实现抑制嵌合失败和防止角度偏移。
56.<变形例>
57.上述实施方式只不过是例示性地说明本发明的构成例的方式。本发明并不限定于上述具体的方式,能够在其技术思想的范围内进行各种变形。
58.在变形例1中,作为弹性部件140,使用非线性弹簧元件。图4是表示线性弹簧与非线性弹簧的特性的差异的图表,横轴表示位移(挠曲),纵轴表示载荷。线性弹簧的载荷与位移成正比例的关系,无论位移如何,刚性(弹簧常数)都恒定,相对于此,非线性弹簧表现出位移越大则刚性(弹簧常数)越增加这一特性。这样的非线性特性例如可以通过使螺旋弹簧的线圈直径不均匀、使螺旋弹簧的间距呈不等间隔、使螺旋弹簧的线径不均匀等方法而实现。
59.例如,也可以通过驱动源m的控制,将自由状态下的线状部件130的延伸量如s1[mm]、s2[mm]、s3[mm](s1<s2<s3)这样分多个阶段切换,改变第一部件110与第二部件120之间的分离距离(即,弹簧的位移)。由此,可以控制自由状态下的关节结构1的硬度(柔软度)。例如,通过与机器人的动作或场景相匹配地调整为合适的硬度(柔软度),有望可以实现机器人的应用范围的扩大或高效的动作。
[0060]
图5表示变形例2。在变形例2中,设置有多组由凸部121和凹部111构成的嵌合结构。通过在多个部位进行第一部件110与第二部件120的啮合,有望提高第一部件110与第二部件120的相对的定位精度、或者提高第一部件110与第二部件120之间的固定力,等等。需要说明的是,凹凸的形状或大小在所有的嵌合结构中既可以相同也可以不同。
[0061]
图6表示变形例3。在变形例3中,嵌合结构的凹凸与实施方式相反。即,在第一部件110上设置有凸部121,在第二部件120上设置有凹部111。这样,即使凹凸相反,也可以起到与实施方式相同的作用效果。此外,在如变形例2那样设置多个嵌合结构的情况下,也可以混合存在凹凸的朝向不同的嵌合结构。
[0062]
图7表示变形例4。在变形例4中,不采用嵌合方式,而采用摩擦方式的锁定机构。具体而言,在第一部件110和第二部件120分别设置有相互平行且对置的面117、127,在锁定状态下,第一部件110的面117与第二部件120的面127面接触而使摩擦起作用,由此使第一部件110与第二部件120之间被固定。根据这样的摩擦方式,不需要设置用于使第一部件110与第二部件120啮合的凹凸,因此可以使关节结构1更加紧凑。需要说明的是,为了得到充分的摩擦力,可以对面117、127的部分选择静摩擦系数高的材料、或者对面117、127实施用于提高静摩擦系数的表面处理。
[0063]
在上述实施方式中,使用了螺旋弹簧作为弹性部件140,但也可以使用其他种类的弹性要素(例如阻尼器等)。或者,也可以采用在第一部件110与第二部件120之间不设置弹性部件140的构成。在该构成的情况下,也可以通过使用具有一定程度的硬度的线状部件130,利用线状部件130使自由状态下的第二部件120的姿势稳定。
[0064]
(附录1)
[0065]
(1)一种关节结构(1),将机器人(r)的机械手(rm)的第一要素(11)与第二要素(12)之间连结,其特征在于,所述关节结构(1)具有锁定机构(10),所述锁定机构(10)进行所述第二要素(12)相对于所述第一要素(11)独立地自由运动的自由状态与所述第二要素(12)被固定于所述第一要素(11)的锁定状态的切换,所述锁定机构(10)具有:第一部件(110),与所述第一要素(11)接合;第二部件(120),与所述第二要素(12)接合;以及具有挠性的线状部件(130),所述线状部件(130)的一端安装于所述第二部件(120),另一端穿过设置于所述第一部件(110)的贯通孔(113)被引出至所述关节结构(1)的外侧,通过拉拽所述线状部件(130)而使所述第二部件(120)与所述第一部件(110)接触,从而成为所述锁定状态,通过使所述线状部件(130)伸长而使所述第二部件(120)与所述第一部件(110)分离,从而成为所述自由状态。
[0066]
附图标记说明
[0067]
1:关节结构;10:锁定机构;11:第一要素;12:第二要素;110:第一部件;111:凹部;112:引导槽;113:贯通孔;114:带轮;115:引出孔;117:面;120:第二部件;121:凸部;122:突起;123:贯通孔;127:面;130:线状部件;140:弹性部件;e1:连杆;e2:末端执行器;r:机器人;rm:机械手;rc:控制器;m:驱动源。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。