1.本技术涉及车辆驾驶技术领域,特别是涉及一种定位方法和相关装置。
背景技术:
2.在出行中,会用到地图功能,例如通过包含地图等功能的软件或系统规划行驶路线、提醒驾驶员是否出现违规驾驶行为等。
3.在应用过程中,需要对车辆进行精准定位。在相关技术中,通常采用传感器、激光雷达、高精尖地图等方式来实现对车辆所处车道的精准定位。
4.然而,这些方式成本较高,部分方式还需要对现有道路进行较为复杂的道路改造,难以投入大规模使用。
技术实现要素:
5.为了解决上述技术问题,本技术提供了一种定位方法,处理设备可以结合车辆运动数据和路况图像数据来对车道进行定位,提升了定位的准确性。
6.本技术实施例公开了如下技术方案:
7.第一方面,本技术实施例公开了一种定位方法,所述方法包括:
8.确定目标车辆到达第一位置时在道路中所处的第一目标车道,所述第一位置为所述道路中目标区域在所述目标车辆的行驶方向上的起始位置,所述目标区域在所述第一位置所包括车道的第一车道数量与所述目标区域在第二位置所包括车道的第二车道数量不同,所述第二位置为所述目标区域在所述目标车辆的行驶方向上的结束位置;
9.获取所述目标车辆在所述目标区域内对应的车辆运动数据和路况图像数据;
10.根据所述车辆运动数据、所述路况图像数据和所述第一目标车道,确定所述目标车辆离开所述第二位置之前所对应的第二目标车道。
11.第二方面,本技术实施例公开了一种定位装置,所述装置包括第一确定单元、第一获取单元和第二确定单元:
12.所述第一确定单元,用于确定目标车辆到达第一位置时在道路中所处的第一目标车道,所述第一位置为所述道路中目标区域在所述目标车辆的行驶方向上的起始位置,所述目标区域在所述第一位置所包括车道的第一车道数量与所述目标区域在第二位置所包括车道的第二车道数量不同,所述第二位置为所述目标区域在所述目标车辆的行驶方向上的结束位置;
13.所述第一获取单元,用于获取所述目标车辆在所述目标区域内对应的车辆运动数据和路况图像数据;
14.所述第二确定单元,用于根据所述车辆运动数据、所述路况图像数据和所述第一目标车道,确定所述目标车辆离开所述第二位置之前所对应的第二目标车道。
15.第三方面,本技术实施例公开了一种计算机设备,所述设备包括处理器以及存储器:
16.所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
17.所述处理器用于根据所述程序代码中的指令执行第一方面中所述的定位方法。
18.第四方面,本技术实施例公开了一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序用于第一方面中所述的定位方法。
19.在一个或多个实施例中,通过获取该目标车辆在离开该目标区域前,目标车辆对应的车辆运动数据和路况图像数据,能够实现对车道的准确、及时定位。
20.在一个或多个实施例中,车辆运动数据和路况图像数据可以直接通过常规车载设备获取,不会增加额外成本,因此在保证车道级实时定位的前提下,降低了定位成本。
附图说明
21.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1为本技术实施例提供的一种实际应用场景中定位方法的示意图;
23.图2为本技术实施例提供的一种定位方法的流程图;
24.图3为本技术实施例提供的一种确定第一目标车道的示意图;
25.图4为本技术实施例提供的一种确定运动变道参数的示意图;
26.图5为本技术实施例提供的一种确定图像变道参数的示意图;
27.图6为本技术实施例提供的一种确定图像变道参数的示意图;
28.图7为本技术实施例提供的一种车道线消失的示意图;
29.图8为本技术实施例提供的一种道路地图数据的示意图;
30.图9为本技术实施例提供的一种更新导航规划路径的示意图;
31.图10为本技术实施例提供的一种能够进行车道级实时定位的车载终端架构图;
32.图11为本技术实施例提供的一种车道情况的示意图;
33.图12为本技术实施例提供的一种车道向左拓展的示意图;
34.图13为本技术实施例提供的一种车道向右拓展的示意图;
35.图14为本技术实施例提供的一种车道分离的示意图;
36.图15为本技术实施例提供的一种定位装置的结构框图;
37.图16为本技术实施例提供的一种计算机设备的结构图;
38.图17为本技术实施例提供的一种服务器的结构图;
39.图18为本技术实施例提供的一种实际应用场景中定位方法的流程图。
具体实施方式
40.下面结合附图,对本技术的实施例进行描述。
41.对车辆进行精准的车道定位是多种相关技术得以良好应用的基础,例如,只有能够较为准确的定位出车辆所在车道,才能够实现有效的车辆导航。在地图导航领域中,车道级实时定位对于车辆确定自身所处横向位置、制定导航策略具有重要的意义。此外,基于车道级实时定位的结果,还可以进行车辆车道级的路径规划和引导。精准的车道级实时定位
还有利于提高现有道路网络的车辆通行率以缓解交通拥堵,另一方面也可以提高车辆行驶安全,降低交通事故率。
42.在相关技术中大多数能够实现精准车道定位的技术都需要耗费大量的技术成本。其中,也有部分车道定位方式实现成本较低,例如可以通过采集车辆周边的视觉图像来对车辆所处的车道进行定位。
43.然而,这种通过视觉图像进行车道定位的方式通常依赖于车道中的车道线,若车辆所在道路出现车道数量变更的情况,则道路上很可能会存在部分车道线消失的区域,以及在路口大量车辆同时停车、车道拥堵等多种情况下可能无法采集到车道线信息,因此可能会出现只通过视觉图像无法对车辆所在车道进行准确定位的情况。
44.为了解决上述技术问题,本技术提供了一种定位方法,处理设备可以结合车辆运动数据和路况图像数据来对车道进行定位,从而使多维度数据之间能够进行互补,避免由于出现车道数量变更情况导致基于单一维度数据定位准确度较低的问题;同时,通过较为容易采集的多维数据能够在保障定位准确度的前提下,尽可能降低车道定位成本,有助于该方法的实现和推广。
45.可以理解的是,该方法可以应用于车道定位设备上,该车道定位设备为具有定位功能的处理设备,例如可以是具有定位功能的终端设备或服务器。该方法由终端设备或服务器分别独立执行,也可以应用于终端设备和服务器通信的网络场景,通过终端设备和服务器配合运行。其中,终端设备可以为手机、台式计算机、个人数字助理(personal digital assistant,简称pda)、平板电脑、车载设备等设备。服务器可以理解为是应用服务器,也可以为web服务器,在实际部署时,该服务器可以是独立的物理服务器,也可以是多个物理服务器构成的服务器集群或者分布式系统。终端以及服务器可以通过有线或无线通信方式进行直接或间接地连接,本技术在此不做限制。
46.为了便于理解本技术实施例提供的技术方案,接下来将结合一种实际应用场景,对本技术实施例提供的一种定位方法进行介绍。
47.参见图1,图1为本技术实施例提供的一种实际应用场景中定位方法的示意图,在该实际应用场景中,处理设备可以为服务器101。在图1左下方展示的车道场景中,存在一个目标区域,该目标区域为发生了车道数量变更情况的区域。如图所示,在该目标区域的起始位置包括3条车道,在结束位置包括6条车道。由于发生了车道数量变更情况,因此只凭借视觉图像数据来进行车道定位可能会导致定位结果不够准确的问题。
48.为了提高车道定位的准确度,同时控制车道定位所需的成本,服务器101可以基于多个维度下采集成本较低的数据来实现对车道的综合定位。首先,服务器101可以确定该目标车辆是否到达第一位置,该第一位置为道路中目标区域在目标车辆行驶方向上的起始位置。若到达,则确定该目标车辆已经开始驶入该目标区域,此时,服务器可以确定该目标车辆在道路中所处的第一目标车道。由图可知,该第一目标车道可以为第3车道。
49.随后,服务器101可以获取目标车辆在目标区域内对应的车辆运动数据和路况图像数据,这些数据能够从车辆运动和路况图像这两个数据维度来体现该目标车辆在该目标区域中的车道变化情况。其中,车辆运动数据为基于车辆自身运动即可获取的数据,无需外界环境作为参照,因此受车道环境影响较小,但是也因为没有参考外部环境而缺乏一定的可靠性;路况图像数据主要为基于车道环境来获取的数据,虽然容易受复杂的车道环境影
响,但是也能够更加直观的体现出目标车辆的车道变化情况。因此,通过这两个维度的数据可以实现数据优缺点之间的互补作用。
50.例如,在目标区域中车道线消失的部分,该路况图像数据中可能无法采集到较为准确的车道线信息,进而通过路况图像数据所确定出的车道变化情况可能准确度较低;由于车辆运动数据可以不依赖于车道线进行采集,因此基于该车辆运动数据所确定出的车道变化情况可能具有较高的准确度,此时服务器101可以基于该车辆运动数据对该路况图像数据进行数据互补。
51.服务器101可以综合该车辆运动数据和路况图像数据,确定出该目标车辆在该目标区域中的车道变化情况,通过结合第一目标车道和该车道变化情况,可以确定该目标车辆离开第二位置之前对应的第二目标车道,该第二位置为目标区域在目标车辆的行驶方向上的结束位置。如图1所示,该第二目标车道可以为第4车道。相较于激光雷达、传感器、高精地图等方式来说,车辆运动数据和路况图像数据的采集成本较低,因此通过该定位方法能够在保障车道定位精准度的同时,降低方法的实现难度,容易进行使用和推广。
52.接下来,将结合附图,对本技术实施例提供的一种定位方法进行介绍。
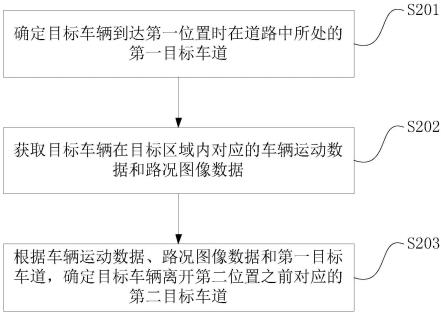
53.参见图2,图2为本技术实施例提供的一种定位方法的流程图,该方法包括:
54.s201:确定目标车辆到达第一位置时在道路中所处的第一目标车道。
55.为了降低车道级实时定位的成本,同时保证定位精度,在本技术实施例中可以降低对高成本技术,例如高精地图、载波测量、激光雷达等技术的使用,转而使用一些实现难度较小、成本较低的技术来进行车道定位。
56.然而,由于这些低成本技术自身可能存在采集数据较为简单、定位精度低、受干扰概率大等问题,在一些较为复杂的行车场景下可能难以实现准确的车道级实时定位。例如,在通过图像采集来对目标车辆进行车道定位时,通常依赖于所采集图像中的车道线位置,然而,若车辆所处道路上出现车道线消失、车辆拥挤导致无法拍摄到车道线时,只依赖于图像采集技术可能就无法实现准确定位。
57.为了解决上述问题,在本技术实施例中,处理设备可以在图像数据维度的基础上,进一步加入能够不依赖图像进行车道定位的其他维度的数据,从而能够实现多维度数据间的互补,提高车道级实时定位的准确性。
58.首先,处理设备可以设定一个目标区域,该目标区域为难以只通过图像数据进行视觉定位实现准确车道级实时定位的区域,例如可以为一些道路变化较为复杂、容易产生车辆拥堵的区域。在现实情况中,这类区域通常伴随着车道数量的变化,由于变化前后车道数量的不同,因此大概率会出现车道线消失的问题。同时,车道数量变化的情况通常发生在需要进行多方向车辆通行的路口处,在路口处会经常出现由于等待通行而造成车辆拥堵的情况,上述情况都容易导致视觉定位不准确的问题,如图11所示,图11为本技术实施例提供的一种车道情况的示意图,由于自车被多个车辆所包围,因此可能难以准确对车身周围的车道图像进行采集。基于此,本技术实施例可以将目标区域设定为车道数量发生变化的区域,从而可以针对这些较为复杂的区域进行准确分析。
59.处理设备可以确定目标车辆到达第一位置时在道路中所处的第一目标车道,该目标车辆可以为在道路上行驶的任意车辆,该第一位置为该道路中目标区域在目标车辆的行驶方向上的起始位置,该目标区域在第一位置所包括车道的第一车道数量与该目标区域在
第二位置所包括车道的第二车道数量不同,该第二位置为目标区域在目标车辆的行驶方向上的结束位置。
60.例如,如图3所示,图3为本技术实施例提供的一种确定第一目标车道的示意图。首先,处理设备可以通过安装在目标车辆上(例如安装在挡风玻璃,或者车顶等位置)的单目摄像头获取目标车辆前方的道路图像,然后对该图像数据进行要素分割,识别与该目标车辆相邻的各条车道线信息。处理设备可以对各条相邻车道线进行逆透视变换,即将各条相邻车道线对应的坐标从摄像头坐标系中转换到世界坐标系中。
61.处理设备可以对变换后的车道线进行拟合重建,确定目标车辆在当前道路中所处的车道,例如左数第几车道或右数第几车道。参见图3,图3展示了一种4车道的道路场景,左右两边的双实线表示道路边缘,对于目标车辆,图3上方展示了左数的车道确定规则,从左数第1车道到当前所处车道,所确定出的第一目标车道为左2车道;图3下方展示了右数的车道确定规则,从右数第1车道到当前所处车道,所确定出的第一目标车道为右3车道。
62.此外,处理设备还可以利用机器学习技术,将采集到的道路图像输入到神经网络中进行学习训练,得到对应的神经网络模型,该神经网络模型可以将车辆所处车道作为输出结果,例如左数第几车道等。在上述方式无法确定出车辆所处车道时,可以输出结果为0。
63.为了进一步提高该第一目标车道的准确度,处理设备可以通过一定的规则或者方法对该第一目标车道的确定结果进行滤波处理,例如中值滤波处理等,能够有效减少车道定位结果的抖动。
64.s202:获取目标车辆在目标区域内对应的车辆运动数据和路况图像数据。
65.为了弥补视觉定位的不足,处理设备可以综合不需要依赖视觉图像进行定位的其他维度数据,共同进行车道级实时定位。处理设备可以获取目标车辆在目标区域内对应的车辆运动数据和路况图像数据,该车辆运动数据能够从车辆自身运动的角度反应出该目标车辆在目标区域中的位移情况,该路况图像数据能够从车辆周围图像变化的角度反应出该目标车辆在目标区域中的位移情况。
66.由于该车辆运动数据只需要采集车辆自身的数据信息即可,无需外界环境作为参照,因此即使出现了较为复杂的车道情况,例如出现车道线消失、周围车辆拥堵等不利于对车辆周围图像变化进行准确分析的情况时,基于该车辆运动数据也能够反应出较为准确的车辆位移情况,从而在一定程度上能够弥补基于路况图像数据进行车道定位的缺陷。
67.s203:根据车辆运动数据、路况图像数据和第一目标车道,确定目标车辆离开第二位置之前对应的第二目标车道。
68.上已述及,通过车辆运动数据和路况图像数据,处理设备能够基于车辆自身运动和车辆周围图像这两个角度对目标车辆在目标区域中的位移情况进行分析,从而能够较为精准的确定出该目标车辆在该目标区域中的车道变化情况。进而,基于该第一目标车道以及该车辆运动数据和路况图像数据所标识出目标车辆在该目标区域中的车道变化情况,处理设备能够较为精准的确定出该目标车辆在离开该目标区域时所处的第二目标车道。
69.由上述技术方案可以看出,由于车辆运动数据能够从车辆自身的角度,基于车辆内部数据标识可能的车辆横向位移情况,路况图像数据能够从模拟车辆视觉的角度,基于车辆外部数据的参照来确定可能的车辆横向位移情况。结合模拟车辆视觉维度和车辆本身运动维度在车辆横向位移识别角度上的互补,能够精确勾勒出目标车辆在该目标区域这种
复杂环境中的车道变化情况,进而可以结合目标车辆到达第一位置时在道路中所处的第一目标车道,确定出目标车辆离开第二位置之前对应的第二目标车道,实现对车道的及时定位。而且由于车辆运动数据和路况图像数据可以直接通过常规车载设备获取,不会增加额外成本,因此在保证车道级实时定位的前提下,降低了定位成本。
70.具体的,在实际车道定位过程中,处理设备对该车辆运动数据和路况图像数据进行分析的方式可以包括多种。在一种可能的实现方式中,由于在较为复杂的道路情况中,路况图像数据受干扰的概率较大,而车辆运动数据通常只基于车辆自身运动进行采集,受干扰的概率较小,因此该车辆运动数据所体现出的车道变化情况可能精准度要大于该路况图像数据。同时,由于路况图像数据能够体现出该车辆周围的图像情况,因此可能会采集到部分能够用于对车辆所处道路进行定位的图像特征,因此基于该路况图像数据可以在一定程度上实现对车道变化情况的校验效果。
71.同时,由于该第一目标车道为目标车辆到达第一位置时即可确定出的,该车辆运动数据和路况图像数据是在目标车辆处于目标区域内即可获取的,由此可见,在目标车辆离开该第二位置之前,处理设备已经可以获取到对该目标车辆进行车道定位所需的信息。从而为了实现车道级实时定位,处理设备可以根据该车辆运动数据、路况图像数据和第一目标车道,在该目标车辆离开第二位置之前确定该目标车辆对应的第二目标车道。
72.综上所述,处理设备可以主要基于该车辆运动数据来确定该目标车辆的车道变化情况,并基于该路况图像数据对基于该车辆运动数据所确定出的车道变化情况进行校验。处理设备可以根据车辆运动数据确定运动变道参数,该运动变道参数用于标识目标车辆没有变换车道或变换车道的方向、变换车道的数量。根据该运动变道参数、该路况图像数据和第一目标车道所对应的第一目标车道标识,处理设备可以在目标车辆离开第二位置之前确定第二目标车道标识,该第二目标车道标识用于标识第二目标车道。从而可以通过较为准确的数据来确定该目标车辆的车道变化情况,并通过较为鲜明的图像数据特征来对分析出的车道变化情况进行校验,从而确定出更加准确的第二目标车道标识。
73.例如,若处理设备基于该车辆运动数据确定出该目标车辆在目标区域中进行了向左变道的动作,然而在路况图像数据中发现该目标车辆实际上远离了行驶方向左侧的道路护栏,则可以判定出基于该车辆运动数据所确定出的车道变化情况不够准确。
74.其中,为了进一步提高车道定位的准确度,处理设备可以采用多种车辆运动数据来对车道变化情况进行分析。在一种可能的实现方式中,该车辆运动数据可以包括车辆运动角度数据、陀螺仪数据和方向盘转动数据中的至少一种。车辆运动角度数据用于标识目标车辆行驶过程中的行驶角度变化情况,陀螺仪数据可以用于标识目标车辆在各个角度维度上的角度变化情况,方向盘转动数据可以用于标识行驶过程中目标车辆的方向盘转动情况。
75.处理设备可以根据该车辆运动数据确定该目标车辆在目标区域内、横向方向上的位移参数,该横向方向与第二位置所对应的车道指示的行进方向垂直。从而,根据该横向方向的位移参数,处理设备可以确定该目标车辆在进行变道对应的方向上位移的距离,进而能够根据该位移参数确定运动变道参数,使该运动变道参数能够标识出该目标车辆没有变换车道或变换车道的方向、变换车道的数量。
76.如图4所示,图4为本技术实施例提供的一种确定运动变道参数的示意图,基于车
辆运动数据,处理设备可以获得目标车辆的车速v,单位为米每秒m/s,也可以由单位千米每小时km/h转换得到m/s。处理设备可以设置采样频率s,则两次采样的间隔时间δt=1/s。处理设备可以通过目标车辆上的惯性测量单元(inertial measurement unit,imu)来获取车辆运动数据中的陀螺仪数据,根据该陀螺仪数据确定方向角度β,该方向角度是指车辆的行驶方向;处理设备还可以采集两次采样间隔内的陀螺仪旋转角度φ,即δt前后的方向角度的采样结果分别为β和β φ,从而目标车辆在δt时间内的平均方向角度为如图4所示。其中道路方向角度α和陀螺仪的方向角度β是基于同一规则表示的角度,例如,选择正北方向为0
°
,顺时针方向为正,角度取值范围为[0,360)。
[0077]
由上述参数可以确定目标车辆在采样间隔δt内的横向方向的位移参数δy:
[0078][0079]
通过计算预设窗口时间(例如3s、5s等)内的δy之和,处理设备可以确定出该目标车辆在该窗口时间内的累积横向位移值,该窗口时间可以为该目标车辆在该目标区域中能够进行变道的时间,该累积横向位移值即为该目标车辆在目标区域内的横向方向的位移参数。处理设备可以设定向左位移时位移参数为负,向右位移时为正,通过判断该位移参数是否大于一个设定阈值来判断目标车辆是否进行了右变道,是否小于一个设定阈值来判断目标车辆是否进行了左变道,若未大于或小于上述设定阈值则可以确定该目标车辆没有发生变道,该设定阈值可以为基于车道宽度所设定的。
[0080]
此外,处理设备也可以通过陀螺仪的方向角度β以及两次采样间隔内的陀螺仪旋转角度φ来对变道情况进行判断。例如,若目标车辆向右进行变道,则需要先向右转向然后向左回转,β为先增大后减小,即φ先大于0后小于0;向左进行变道则需要先向左转向然后向右回转,β为先减小后增大,即φ先小于0后大于0。值得注意的是,若道路为弯曲道路,目标车辆在正常行驶时也会进行角度偏转,因此为了进一步提高对变道情况判断的准确度,处理设备还可以结合其他数据,例如道路数据等一同进行判断。
[0081]
同理,基于方向盘转动数据,处理设备也可以对变道情况进行判断。例如,当目标车辆向左进行变道时,需要先向左转动方向盘然后向右回转;向右进行变道时,需要先向右转动方向盘然后向左回转。该方法同样需要结合其他数据,以提高在弯曲道路等情况中的准确度。
[0082]
此外,为了进一步提高车道级实时定位的准确度,除了基于车辆运动数据来确定变道参数外,处理设备还可以基于路况图像数据来确定该目标车辆在该目标区域中的变道参数。可以理解的是,当目标车辆进行变道时,该目标车辆周围的图像通常会发生变化,例如在图像中目标车辆与车道中车道线之间的距离会发生变化、目标车辆与道路两旁护栏的距离会发生变化等,基于这些图像信息,处理设备可以确定出目标车辆进行位移的方向和距离等参数,进而确定出该目标车辆的车道变化情况。
[0083]
在一种可能的实现方式中,处理设备可以根据路况图像数据确定图像变道参数,该图像变道参数用于标识该目标车辆没有变换车道或变换车道的方向、变换车道的数量。处理设备可以根据车辆运动数据、图像变道参数和第一目标车道所对应的第一目标车道标识,在目标车辆离开第二位置之前确定第二目标车道标识,第二目标车道标识用于标识第二目标车道。
[0084]
其中,基于运动变道参数,处理设备可以从车辆自身运动的角度,基于车辆内部数据来体现出目标车辆在目标区域中的车道变化情况。由于车辆运动数据主要基于车辆自身的运动情况进行采集,因此该运动变道参数受车道环境变化影响程度较小。基于图像变道参数,处理设备可以从模拟车辆视觉的角度,基于车辆外部图像的变化来体现出目标车辆在目标区域中的车道变化情况。由于该路况图像数据能够较为直观的体现出目标车辆所处的环境变化,因此该图像变道参数可以较为可靠的反映出该目标车辆的实际车道变化情况。基于此,通过结合该运动变道参数和图像变道参数,处理设备可以实现两种维度数据之间的互补,既可以降低复杂的车道环境对定位结果的影响,还能够一定程度上保障车道定位结果的准确度,从而实现有效的车道级实时定位。
[0085]
如图5所示,图5为本技术实施例提供的一种确定图像变道参数的示意图。首先,处理设备可以如上述实施例将车道线对应坐标从摄像头坐标系中转化到世界坐标系中,然后基于转化结果以及车辆坐标系确定车道线对应的方程信息,车道线方程的表现形式可以为2次多项式、3次多项式或其他表现形式,例如:
[0086]
y=d a*x b*x2 c*x3[0087]
或者
[0088]
y=d a*x b*x2[0089]
其中,a,b,c,d为多项式的拟合系数,d标识y在x=0时的值,在物理意义上可以表示目标车辆到车道线的距离,向左距离为正,向右距离为负。通过对数值d的变化进行分析,处理设备可以确定出目标车辆与车道线之间的距离变化,进而确定出该目标车辆的车道变化情况。车辆坐标系(vehicle coordinate system,简称vcs)如图5所示,是用于描述车辆运动的特殊三维动坐标系o-xyz,其坐标系原点o相对于车辆位置固定,一般情况下取车辆质心。
[0090]
当车辆在水平路面上处于静止状态,x轴平行于地面指向车辆前方,y轴指向驾驶员的左侧,z轴通过车辆质心指向上方。可以理解的是,图5只是一种坐标系情况的展示,车辆坐标系的建立方式可以包括多种,例如左手系、右手系等,坐标系原点的选择也可以包括多种,例如车辆的前轴中点、车头中点、后轴中点等。
[0091]
如图6所示,图6为本技术实施例提供的一种确定图像变道参数的示意图,l1、l2分别表示距离目标车辆左侧最近的第一根车道线和第二根车道线,r1、r2分别表示距离车辆右侧最近的第一根车道线和第二根车道线,根据对车道线方程的拟合结果,可以得到该目标车辆到每一条车道线之间的截距距离参数d
l1
,d
l2
,d
r1
,d
r2
。
[0092]
基于该截距距离参数,处理设备可以判断出目标车辆在道路中的横向位移,进而确定出该目标车辆是否进行了变道动作。处理设备可以确定出一个图像变道参数visiontrend,取值为未变道(0)、向左变道(-1)、向右变道( 1)三种结果。此外,当目标车辆在目标区域中进行了多车道变道动作时,该图像变道参数可以通过数值来标识目标车辆变道的数量,例如向左变2车道为-2,向右变3车道为 3等。
[0093]
可以理解的是,在一些特殊的车道环境中,可能会出现车辆周围并没有能够作为确定图像变道参数依据的图像特征的情况。例如,如图7所示,图7为本技术实施例提供的一种车道线消失的示意图,在发生了道路扩展的道路中可能出现部分车道线消失的区域。为了使目标车辆在这部分特殊区域也能够较为准确的确定出图像变道参数,提高方法的灵活
性和适用度,在一种可能的实现方式中,该目标区域中存在车道线消失区域,当该目标车辆处于该车道线消失区域,处理设备可以根据路况图像数据,先确定第二位置所包括车道的目标车道线,该目标车道线是指能够用于对目标车辆的车道变化情况进行分析的车道线。
[0094]
虽然该目标车道线可能并没有位于当前目标车辆位置的两侧,但是处理设备可以通过模拟车道线位置或模拟车辆位置的方法,将该目标车辆和该目标车道线拟合到同一位置维度中进行分析,从而能够确定该目标车辆与该目标车道线之间的距离。处理设备可以确定该目标车辆与目标车道线之间的截距距离参数,根据该截距距离参数,处理设备可以分析得到该目标车辆在道路中的横向位移变化,从而能够根据该截距距离参数确定图像变道参数,使该图像变道参数能够体现出该目标车辆的车道变化情况。
[0095]
其中,将目标车辆和目标车道线拟合到同一位置维度中的方式可以包括多种,例如,在方式一中,处理设备可以基于目标车道线进行延长,得到模拟车道线,该模拟车道线能够延长至目标车辆所处的车辆位置,处理设备基于该目标车辆与该模拟车道线之间的截距距离来确定该目标车辆与目标车道线之间的截距距离参数;在方式二中,处理设备可以基于目标车辆所处的位置进行延伸,得到该目标车辆在该目标车道线附近的模拟车辆位置,并基于该模拟车辆位置和该目标车道线之间的截距距离来确定该目标车辆与该目标车道线之间的截距距离参数。从而,在车身周围不存在车道线的情况下,处理设备也可以基于远处的车道线较为准确的实现对目标车辆车道变化情况的分析,提高方法的实用性。
[0096]
除了对目标车辆自身的车道变换情况进行分析外,车道自身的数量变换情况也是车道级实时定位技术中的重要因素。例如,车道数量增加,即车道拓展可能包括车道向左拓展和车道向右拓展两种情况,如图12和图13所示,图12展示了一种车道向左拓展的示意图,图13展示了一种车道向右拓展的示意图,当车道定位为左数规则时,若车道发生了向左拓展,处理设备可以基于车道向左拓展的数量来确定最终该目标车辆位于左数第几车道,从而避免由于缺乏对增加车道数量的计算而导致确定出的第二车道标识不够准确的问题。此外,车道拓展也有可能存在车道分离的场景,如图14所示,图14展示了一种车道分离的示意图,处理设备可以通过左数或右数任意规则来进行车道确定,此处不做限定。
[0097]
基于此,在一种可能的实现方式中,处理设备可以结合车道拓扑关系来确定第二目标车道,从而能够基于车道数量的变化情况来对目标车辆所处车道进行更加准确的定位。首先,为了获知目标车辆位于哪条道路,处理设备可以获取目标车辆对应的车辆位置信息,该车辆位置信息用于标识该目标车辆所处的位置。例如,处理设备可以跟踪目标车辆在历史时段中采集的车辆位置信息,该车辆位置信息可以包括但不限于全球定位系统gps信息、车辆控制信息、车辆视觉感知信息以及imu信息等。处理设备可以根据对这些信息进行分析,确定出该目标车辆在当前时刻的定位点信息,该定位点信息即为目标车辆当前所处的地理位置,例如可以为目标车辆对应的经纬度坐标。
[0098]
处理设备可以根据该车辆位置信息获取目标区域对应的道路地图数据,该道路地图数据用于标识该目标区域所包括道路的相关信息。在本技术实施例中,处理设备可以根据该道路地图数据确定目标区域对应的车道拓扑关系,该车道拓扑关系可以包括第一车道与第二车道之间的拓扑关系,该拓扑关系用于体验第一车道与第二车道之间的数量变化情况以及数量变化方式,该第一车道为起始位置所对应的车道,第二车道为结束位置所对应的车道。
[0099]
例如,该拓扑关系可以标识第一车道数量、第二车道数量,以及第一位置所包括车道与第二位置所包括车道间的车道拓扑,该车道拓扑是指车道数量由第一车道数量变第二车道数量的具体变化方式。可以理解的是,车道拓扑关系中所包含的信息都为道路的基本数据,因此处理设备无需获取高精尖的道路地图数据即可实现本技术实施例的技术方案,实现难度较低。例如,处理设备可以获取根据目标车辆的定位点信息,匹配到对应的道路位置,然后获取该道路位置的传统道路地图数据,如标准精确度(standard definition,简称sd)数据,该传统道路地图数据用于记录道路的基本属性,例如道路长度、车道数、道路方向和车道拓扑关系等基本信息。该传统道路地图数据的制作成本低,获取难度较小。
[0100]
处理设备可以根据该车辆运动数据、路况图像数据、车道拓扑关系和第一目标车道所对应的第一目标车道标识,在目标车辆离开第二位置之前确定第二目标车道标识,该第二目标车道标识用于标识第二目标车道,从而能够使该第二目标车道标识在出现车道数量变化的情况下能够更加准确的标识出目标车辆离开第二位置之前所处的车道。
[0101]
除了可以基于道路地图数据获取车道拓扑关系外,为了进一步提高车道级实时定位的准确度,处理设备还可以基于该道路地图数据确定出较为准确的目标区域的起始点,并基于该目标区域起始点来对目标车辆所处车道进行定位,从而使确定出的第二车道标识能够有效的标识目标车辆离开目标区域时所处的车道。
[0102]
例如,处理设备在获取道路地图数据时,该道路地图数据中可以包括高级驾驶辅助系统(advanced driving assistance system,简称adas)数据,adas数据为一种介于sd数据和高精道路(high definition,简称hd)数据之间的过渡形态的数据,其信息的丰富程度和精度介于sd数据和hd数据之间,相对于sd数据而言,主要增加了道路中的车道线类型、颜色、车道属性、车道数变化点、车道虚实线变化点等信息。基于该adas数据中所包括的一些特征点信息,处理设备可以确定出该目标区域所对应的第一位置和第二位置。
[0103]
如图8所示,图8为本技术实施例提供的一种道路地图数据的示意图,在传统sd数据的基础上,adas数据可以在数据中添加多个特征点fearture point,通过特征点将道路换分为更加细致的多个区域section,每个section中具有车道数信息以及车道自身的关联信息等。例如,通过该adas数据,处理设备可以确定出图8中的路口车道拓展起始点和停止线特征点,该路口车道拓展起始点用于标识第一位置,该停止线特征点用于标识第二位置,该路口车道拓展起始点和停止线特征点之间的区域为目标区域,该目标区域为发生了车道拓展的路口区域,由区域2和区域3构成,该道路中的车道从该车道拓展起始点开始拓展,到停止线特征点处由3车道拓展为了6车道。处理设备可以在目标车辆到达车道拓展起始点时确定该目标车辆对应的第一目标车道,然后获取该目标车辆在该区域2和区域3中的路况图像数据和车辆运动数据,基于该数据、车道拓扑关系以及第一目标车道所对应第一目标车道标识,在目标车辆到达停止线特征点之前确定该目标车辆对应的第二目标车道标识。
[0104]
此外,通过adas数据,处理设备也可以获知车道级拓扑信息,例如拓展后的车道1、2、3对应于拓展前的车道1,拓展后的车道5、6对应于拓展前的车道3。通过该车道级拓扑信息,处理设备可以进一步对确定出的第二目标车道标识进行验证,例如,若第一目标车道为车道1,在多数情况下目标车辆都会驶入拓展后的车道1、2、3,若第二目标车道标识所标识的第二目标车道为拓展后的车道6,则说明该车道定位结果的准确度可能较低。
[0105]
可以理解的是,车辆在道路中进行变道也需要一定的条件,例如需要遵守交通规
则,在虚线或车道线消失的位置进行变道。因此,在目标区域中可能并不是全部的区域部分都允许该目标车辆进行变道。为了进一步提高车道级实时定位的及时性,处理设备可以关注该目标车辆在目标区域中可变道区域中的车道变化情况,该可变道区域是指允许车辆进行变道动作的区域。由于在离开可变道区域后,目标车辆大概率不会再进行变道动作,因此处理设备在目标车辆在该可变道区域行驶过程中即可获取到用于对车道变化情况进行分析的全部数据,并能够在目标车辆离开该可变道区域之前确定出第二车道标识,从而无需等待目标车辆驶完该目标区域,进一步提前确定该第二车道标识的时间。
[0106]
在一种可能的实现方式中,道路地图数据中还包括第三位置,该第三位置为目标区域中可变道区域在目标车辆的行驶方向上的结束位置,该第三位置位于第一位置和第二位置之间。处理设备可以获取该目标车辆在第一位置和第三位置之间对应的车辆运动数据和路况图像数据,由于在经过该第三位置后,目标车辆就进入了道路中不允许变道的区域,即大概率不会进行变道动作,因此通过该车辆运动数据和路况图像数据即可较为准确和全面的体现出该目标车辆在该目标区域中的车道变化情况。处理设备可以根据该车辆运动数据、路况图像数据和第一目标车道所对应的第一目标车道标识,在目标车辆离开第三位置之前确定第二目标车道标识,该第二目标车道标识用于标识第二目标车道,从而能够进一步缩短车道定位所需的时间。
[0107]
如图8所示,基于adas数据,处理设备还能够确定出停止线特征点和路口车道拓展起始点之间的一个虚实线变化点作为第三位置,该虚实线变化点是指车道线由消失变为实线的点。在路口车道起始点和该虚实线变化点之间由于车道线消失,因此目标车辆可以进行变道动作;在经过该虚实线变化点后,由于车道线为实线,因此按照交通规则目标车辆不能够进行变道动作。基于此,处理设备可以获取目标车辆在路况车道拓展起始点到该虚实线变化点之间的车辆运动数据和路况图像数据,并在目标车辆到达该虚实线变化点之前或到达该虚实线变化点时确定第二目标车道标识。
[0108]
上已述及,路况图像数据能够较为直观的反应出目标车辆周围图像的变化情况,例如能够采集到一些能够用于对车道定位的图像特征,该图像特征具有较强的客观性和可信度,因此,处理设备可以基于该图像特征,对确定出的车道定位结果进行进一步的校验。
[0109]
在一种可能的实现方式中,处理设备可以根据该路况图像数据确定目标车辆在第二位置所处车道的待定车道标识,该待定车道标识能够从车辆周围图像的角度较为直观的体现出该目标车辆所处的车道。可以理解的是,道路中的边缘车道通常具有较为明显的图像特征,该边缘车道是指道路中处于最外侧的车道,例如,在图8中,拓展前的车道1和车道3为道路上的边缘车道。在边缘车道上通常具有防止车辆驶出车道的边缘护栏、路牙等,若在路况图像数据中出现了此类图像特征,则说明目标车辆大概率位于边缘车道上。由此可见,若能够基于路况图像数据所确定出的待定车道标识所标识车道为这种特殊车道,则该待定车道标识通常具有较高的可靠性。
[0110]
基于此,若该待定车道标识所标识的车道为第二位置所包括车道中的边缘车道,则处理设备可以将该待定车道标识确定为第二目标车道标识,从而能够基于路况图像数据所体现出的直观图像特点,进一步提高该第二目标车道标识的准确度。
[0111]
同理,若确定该待定车道标识所标识的车道不为第二位置所包括车道中的边缘车道,则说明该路况图像数据中可能没有采集到能够用于体现该边缘车道的图像特征,即目
标车辆大概率没有位于该边缘车道上。此时,若处理设备基于车辆运动数据和路况图像数据所确定出的第二目标车道标识所标识车道为该边缘车道,则该第二目标车道标识大概率为错误的车道标识。因此,处理设备可以对该第二目标车道标识进行修正,以提高该第二目标车道标识的准确度。
[0112]
在一种可能的实现方式中,响应于该第二目标车道为第二位置所包括车道中的边缘车道,处理设备可以将该第二目标车道标识更新为该第二目标车道的相邻车道的车道标识。可以理解的是,由于该第二目标车道标识是综合车辆运动数据和路况图像数据所确定出的,因此该第二目标车道标识本身也具有一定的准确度,即使该第二目标车道标识所标识的车道与实际所处的车道有一定误差,该误差也通常处于一个较小的误差范围内。因此,通过更改为第二目标车道的相邻车道,可以在基于路况图像数据对第二目标车道标识进行修正的同时,保障该第二目标车道标识的准确度和合理性。
[0113]
通过上述方式,处理设备可以确定出一个准确度较高的第二目标车道,从而能够基于该第二目标车道进行一些有效的实际应用。例如,在车道上通常具有对应的车道行驶标识,该车道行驶标识用于标识相应车道的可行驶方向。例如图8所示,在拓展后的6个车道中,第1、2车道的车道行驶标识为左转标识,指示通过该车道可以向左转向;第3、4、5车道的车道行驶标识为直行标识,指示通过该车道可以直行;第6车道的车道行驶标识为右转标识,指示通过该车道可以右转。因此,在确定出第二目标车道后,通过该第二目标车道对应的车道行驶标识,处理设备可以获知目标车辆在后续行驶过程中的可行驶方向。
[0114]
其中,车辆的可行驶方向是车辆导航技术中的重要参考因素,若车辆所对应的行驶路线在该目标区域处指示的行驶方向与该第二目标车道所对应的可行驶方向不匹配,则会导致目标车辆无法按照该行驶路线继续行驶。在相关技术中,由于无法通过低成本技术在出现车道拓展的复杂道路区域及时对车道所在车道进行定位,因此只有在车辆驶出该区域后,进行相应的直行或转向动作后才能够判断出车辆所处车道,此时再对车辆的行驶路径进行规划时机较晚,难以给用户提供良好的导航体验。
[0115]
在本技术实施例中,由于处理设备可以在目标车辆离开目标区域前确定出目标车辆所处车道,因此,在离开目标区域前,处理设备即可根据第二目标车道对应的可行驶方向对该目标车辆的行车路线进行规划,从而使用户能够在离开目标区域时就已经获取到较为准确的行驶路线导航,进一步提高用户的导航体验。在一种可能的实现方式中,处理设备可以确定该第二目标车道对应的车道行驶标识,该车道行驶标识用于标识该第二目标车道的可行驶方向。为了判断该目标车辆所处的车道是否适合当前的导航规划,处理设备可以获取该目标车辆对应的导航规划路径,该导航规划路径用于指示目标车辆如何驶向目的地。
[0116]
处理设备可以获取该导航规划路径中与该目标区域相关的行驶指引方向,并判断该行驶指引方向与该车道行驶标识是否匹配,即该车道行驶标识所标识的可行驶方向中是否包括该行驶指引方向,该行驶指引方向是指目标车辆为了开往目的地所需要进行行驶的方向。若该导航规划路径中与目标区域相关的行驶指引方向与该车道行驶标识不符,则说明该目标车辆已经无法再按照该导航规划路径进行行驶。此时,处理设备可以在目标车辆离开第二位置之前,根据车道行驶标识重新确定导航规划路径,从而能够及时的对该导航规划路径进行更新,使用户能够在驶出目标区域之前即可获知接下来的行驶路线,进一步提高了用户的导航体验。同时,由于能够提前进行导航更新,因此用户能够避免驾驶车辆进
行无效行驶,节省了能源,降低了环境污染和资源消耗。
[0117]
如图9所示,图9为本技术提供的一种更新导航规划路径的示意图,其中虚线为更新前的导航规划路径,实线为更新后的导航规划路径,目标区域为一个路口区域。由图可见,在更新前的导航规划路径中,处理设备应该在离开该路口后直线行驶,然而由于该目标车辆在路口处处于左转车道中,因此只能够进行左转。在相关技术中,要等待目标车辆到达b点时才能够确定出该目标车辆驶入了错误的车道,进而才能够重新确定导航规划路径,更新速度较慢。在本技术实施例中,处理设备可以基于第二目标车道标识所标识的第二目标车道,从adas数据中获取该车道对应的车道行驶标识,在图8中为左转标识。在判断该左转标识与导航规划路径中与目标区域相关的直行方向不匹配后,处理设备可以在目标车辆到达a点附近时,基于该左转标识、目标车辆当前所处的位置以及目标车辆的目的地完成对导航规划路径的更新,进一步提高导航规划的速度和效率,改善用户的导航体验。
[0118]
为了便于理解本技术实施例提供的技术方案,接下来,将结合一种实际应用场景,对本技术实施例提供的一种定位方法进行介绍。
[0119]
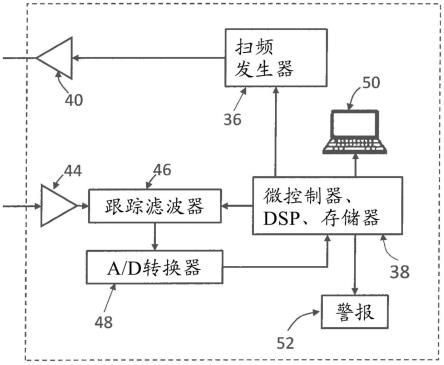
在该实际应用场景中,目标区域为如图8所示的出现车道拓展情况的路口区域,处理设备为具有车道级实时定位功能的车载终端。参见图10,图10为本技术实施例提供的一种能够进行车道级实时定位的车载终端架构图,接下来将基于该车载终端架构图进行说明。
[0120]
结合图18,图18为本技术实施例提供的一种实际应用场景中定位方法的流程图,该方法包括:
[0121]
s1801:在目标车道到达路口区域时确定第一目标车道。
[0122]
首先,在目标车辆到达该路口区域时,车道级定位模块可以对目标车辆所处的车道进行定位,得到第一目标车道所对应的第一目标车道标识laneindex。其中,判断目标车辆是否到达路口区域的方法可以包括多种,例如,可以通过地图数据模块获取的道路地图数据,判断附近区域是否存在路口,如果存在路口则计算目标车辆距离路口车道拓展变化点的距离,当该距离小于某一阈值(例如5m、10m)时,确认车辆到达路口区域。
[0123]
s1802:确定目标车辆对应的定位点信息。
[0124]
随后,通过车辆定位模块,可以确定该目标车辆对应的定位点信息,该定位点信息为该目标车辆所对应的车辆位置信息。
[0125]
s1803:获取目标区域对应的道路地图数据。
[0126]
基于该定位点信息,地图数据模块可以获取目标区域对应的道路地图数据,该道路地图数据中包括该路口区域中的路口车道拓展起始点、虚实线变化点、停止线特征点、车道拓扑关系以及车道上的车道行驶标识等信息。
[0127]
s1804:根据道路地图数据确定是否发生车道拓展情况。
[0128]
根据道路地图数据中的车道拓扑关系,处理设备可以确定该路口区域中是否发生了车道拓展情况,即该路口区域的起始位置和结束位置的车道数量是否一致,若一致,则说明不存在车道拓展情况,可以进入s1805;若不一致,则说明存在车道拓展情况,可以进入s1806。
[0129]
其中,判断路口区域是否发生车道拓展的方式可以包括以下几种:
[0130]
方式一,可以通过道路地图数据中的局部adas数据判断路口区域结束位置处的车
道总数lanecntcur和起始位置处的车道总数lanecntpre是否相等;
[0131]
方式二,可以判断该adas数据中是否具有车道拓展起始点信息,若有,则说明发生了车道拓展;
[0132]
方式三,可以通过adas数据中的车道拓扑关系进行判断,例如在图8所示的区域中,起始位置的车道1连接结束位置的车道1、2、3,可知该区域发生了左扩2车道的情况;起始位置的车道3连接路口位置的车道4、6,可知该区域发生了右扩1车道的情况。
[0133]
s1805:若不存在车道拓展情况,根据车道级定位模块确定第二目标车道。
[0134]
其中,若基于车道拓扑关系判断出该路口处不存在车道拓展的情况,则车载终端可以认为这种场景较为容易进行车道级定位,直接将车道级定位模块的定位结果作为第二目标车道标识,即laneindexcrossing=laneindex。
[0135]
s1806:若存在车道拓展情况,确定车道拓展个数和拓展方向。
[0136]
若存在车道拓展的情况,车载终端可以通过车道拓扑关系计算出左右车道拓展的个数,具体方式如下:
[0137]
根据起始位置的左1车道到结束位置的车道联通关系(设左1车道连接m个结束位置的车道),判断左拓展信息,左拓展个数为left_expand=m 1;
[0138]
根据起始位置的右1车道到结束位置的车道联通关系(设右1车道连接n个结束位置的车道),判断右拓展信息,右拓展个数为right_expand=n 1;
[0139]
值得注意的是,该数值也可以通过adas数据直接获取。
[0140]
s1807:获取可变道区域内对应的车辆运动数据和路况图像数据。
[0141]
车载终端可以基于地图数据模块所确定出的多个特征点进行数据获取,在该实际应用场景中,车载终端可以通过运动数据采集模块和视觉模块中的图像采集单元,分别获取该目标车辆在路口车道拓展起始点与虚实线变化点之间的车辆运动数据和路况图像数据,该车辆运动数据包括车速采集单元所采集的车速数据、方向盘转角采集单元采集的方向盘转动数据和imu采集单元采集的imu数据等,该车速数据和方向盘转动数据可以从车辆控制器局域网络(controller area network,简称can)总线中获取,imu数据可以从车机自带的传感器获取,gps信号可以通过车机远程信息处理器(telematics box,简称t-box)中获取。
[0142]
s1808:根据车辆运动数据和路况图像数据,确定运动变道参数和图像变道参数。
[0143]
基于路况图像数据,视觉模块中的图像处理单元可以确定出图像变道参数visiontrend,该图像变道参数能够通过数值标识目标车辆没有变道或变道的数量,通过正负标识目标车辆变道的方向,向左变道为负数,向右变道为正数。例如,向左变2车道可以为-2。此外,基于路况图像中的特殊车道对应的图像特征,车载终端还可以确定出一个待定道路标识visionlaneindex,该待定道路标识可以标识出该目标车辆在路口区域结束位置处是否处于边缘车道。
[0144]
路口车道级定位模块可以基于车辆运动数据确定出运动变道参数drtrend,该运动变道参数与图像变道参数的数值规则一致。
[0145]
s1809:根据第一目标车道所对应第一目标车道标识、图像变道参数、运动变道参数和车道拓扑关系,在目标车辆离开可变道区域之前确定第二目标车道标识。
[0146]
路口车道级定位模块可以基于该第一目标车道标识、运动变道参数、图像变道参
数和车道拓扑关系中车道拓展的方向和数量,确定第二目标车道标识。
[0147]
其中,路口车道级定位模块首先可以判断待定道路标识visionlaneindex是否为左1车道或右1车道,即visionlaneindex是否等于1或lanecntcur,若是,则可以将该visionlaneindex确定为第二目标车道标识laneindexcrossing。
[0148]
若不为边缘车道,则可以根据图像变道参数和运动变道参数,确定出一个较为准确的综合变道参数fusiontrend。确定方式如下:
[0149]
当图像变道参数和运动变道参数均标识目标车辆为左/右变道时,输出综合变道参数为左/右变道,否则输出结果为未变道,fusiontrend=0,也可以选择置信度较高的变道参数进行输出;
[0150]
当图像变道参数和运动变道参数中任意一个为左/右变道,另一个为未变道时,输出该左/右变道结果;
[0151]
其它情况均可以输出未变道。
[0152]
路口车道级定位模块可以通过如下公式确定第二目标车道标识:
[0153]
laneindexcrossing=laneindex left_expand fusiontrend
[0154]
可以理解的是,当设定变道参数为向左变道为负,向右变道为正时,车道右扩数值并不会影响该第二目标车道标识,因此只需要关注左变道情况即可。例如,当laneindex=1,left_expand=2,fusiontrend=-2时,即第一目标车道标识所标识车道为车道1,车道向左拓展2车道,目标车辆进行了向左变道2车道动作,最终得到的第二目标车道标识laneindexcrossing=1 2-2=1,即目标车辆在第二位置处于车道1。
[0155]
由于上述第二目标车道标识的确定过程所需的数据在目标车辆到达虚实线变化点之前即可全部获取,因此车载终端可以在目标车辆离开可变道区域之前完成上述过程。
[0156]
s1810:对第二目标车道标识进行校验。
[0157]
车载终端可以对该第二目标车道标识进行进一步的验证,验证方式如下:
[0158]
方式一,由于车道标识最小为1,因此若laneindexcrossing《1,可以令la-neindexcrossing=1;
[0159]
方式二,由于车道标识最大为lanecntcur,因此若laneindexcrossing》la-necntcur,可以令laneindexcrossing=lanecntcur;
[0160]
方式三,由于待识别车道标识所标识车道不为边缘车道,因此若laneind-excrossing=1,令laneindexcrossing=2;若laneindexcrossing=lanecntcur,令laneindexcrossing=lanecntcur-1。
[0161]
最后,可以基于车道拓扑关系判断该第二目标车道标识是否符合车道之间的联通关系。例如,在图8所示的区域中,起始位置的车道3连通结束位置的车道[5,6],若laneindex=3,则laneindexcrossing数值通常情况下应该在集合[5,6]中,若laneindexcrossing不在该集合中,则可以从该集合内选择一个较为接近的结果进行输出。
[0162]
基于上述实施例提供的一种定位方法,本技术实施例还提供了一种定位装置,参见图15,图15为本技术实施例提供的一种定位装置1500的结构框图,该装置1500包括第一确定单元1501、第一获取单元1502和第二确定单元1503:
[0163]
第一确定单元1501,用于确定目标车辆到达第一位置时在道路中所处的第一目标车道,所述第一位置为所述道路中目标区域在所述目标车辆的行驶方向上的起始位置,所
述目标区域在所述第一位置所包括车道的第一车道数量与所述目标区域在第二位置所包括车道的第二车道数量不同,所述第二位置为所述目标区域在所述目标车辆的行驶方向上的结束位置;
[0164]
第一获取单元1502,用于获取所述目标车辆在所述目标区域内对应的车辆运动数据和路况图像数据;
[0165]
第二确定单元1503,用于根据所述车辆运动数据、所述路况图像数据和所述第一目标车道,确定所述目标车辆离开所述第二位置之前所对应的第二目标车道。
[0166]
在一种可能的实现方式中,第二确定单元1503具体用于:
[0167]
根据所述车辆运动数据确定运动变道参数,所述运动变道参数用于表示所述目标车辆没有变换车道或变换车道的方向、变换车道的数量;
[0168]
根据所述运动变道参数、所述路况图像数据和所述第一目标车道所对应的第一目标车道标识,在所述目标车辆离开所述第二位置之前确定第二目标车道标识,所述第二目标车道标识用于标识所述第二目标车道。
[0169]
在一种可能的实现方式中,所述车辆运动数据包括车辆运动角度数据、陀螺仪数据和方向盘转动数据中的至少一种,第二确定单元1503具体用于:
[0170]
根据所述车辆运动数据确定所述目标车辆在所述目标区域内、横向方向上的位移参数,所述横向方向与所述第二位置所对应的车道指示的行进方向垂直;
[0171]
根据所述位移参数确定所述运动变道参数。
[0172]
在一种可能的实现方式中,第二确定单元1503具体用于:
[0173]
根据所述路况图像数据确定图像变道参数,所述图像变道参数用于表示所述目标车辆没有变换车道或变换车道的方向、变换车道的数量;
[0174]
根据所述车辆运动数据、所述图像变道参数和所述第一目标车道所对应的第一目标车道标识,在所述目标车辆离开所述第二位置之前确定第二目标车道标识,所述第二目标车道标识用于标识所述第二目标车道。
[0175]
在一种可能的实现方式中,所述目标区域中存在车道线消失区域,第二确定单元1503具体用于:
[0176]
当所述目标车辆处于所述车道线消失区域,根据所述路况图像数据,确定所述第二位置所包括车道的目标车道线;
[0177]
确定所述目标车辆与所述目标车道线之间的截距距离参数;
[0178]
根据所述截距距离参数确定所述图像变道参数。
[0179]
在一种可能的实现方式中,装置1500还包括第二获取单元、第三获取单元、第三确定单元:
[0180]
第二获取单元,用于获取所述目标车辆对应的车辆位置信息;
[0181]
第三获取单元,用于根据所述车辆位置信息获取所述目标区域对应的道路地图数据;
[0182]
第三确定单元,用于根据所述道路地图数据确定所述目标区域对应的车道拓扑关系,所述车道拓扑关系包括第一车道与第二车道之间的拓扑关系,所述第一车道为所述起始位置所对应的车道,所述第二车道为所述结束位置所对应的车道;
[0183]
第二确定单元1503具体用于:
[0184]
根据所述车辆运动数据、所述路况图像数据、所述车道拓扑关系和所述第一目标车道所对应的第一目标车道标识,在所述目标车辆离开所述第二位置之前确定第二目标车道标识,所述第二目标车道标识用于标识所述第二目标车道。
[0185]
在一种可能的实现方式中,所述道路地图数据中还包括第三位置,所述第三位置为所述目标区域中可变道区域在所述目标车辆的行驶方向上的结束位置,所述第三位置位于所述第一位置和所述第二位置之间;
[0186]
第一获取单元1502具体用于:
[0187]
获取所述目标车辆在所述第一位置和所述第三位置之间对应的车辆运动数据和路况图像数据;
[0188]
第二确定单元1503具体用于:
[0189]
根据所述车辆运动数据、所述路况图像数据和所述第一目标车道所对应的第一目标车道标识,在所述目标车辆离开所述第三位置之前确定第二目标车道标识,所述第二目标车道标识用于标识所述第二目标车道。
[0190]
在一种可能的实现方式中,装置1500还包括第四确定单元、第四获取单元和第五确定单元:
[0191]
第四确定单元,用于确定所述第二目标车道对应的车道行驶标识,所述车道行驶标识用于标识所述第二目标车道的可行驶方向;
[0192]
第四获取单元,用于获取所述目标车辆对应的导航规划路径;
[0193]
第五确定单元,用于若所述导航规划路径中与所述目标区域相关的行驶指引方向与所述车道行驶标识不符,在所述目标车辆离开所述第二位置之前根据所述车道行驶标识重新确定导航规划路径。
[0194]
在一种可能的实现方式中,装置1500还包括第六确定单元和第七确定单元:
[0195]
第六确定单元,用于根据所述路况图像数据确定所述目标车辆在所述第二位置所处车道的待定车道标识;
[0196]
第七确定单元,用于若所述待定车道标识所标识的车道为所述第二位置所包括车道中的边缘车道,将所述待定车道标识确定为第二目标车道标识,所述第二目标车道标识用于标识所述第二目标车道。
[0197]
在一种可能的实现方式中,若确定所述待定车道标识所标识的车道不为所述第二位置所包括车道中的边缘车道,装置1500还包括更新单元:
[0198]
更新单元,用于响应于所述第二目标车道为所述第二位置所包括车道中的边缘车道,将所述第二目标车道标识更新为所述第二目标车道的相邻车道的车道标识。
[0199]
本技术实施例还提供了一种计算机设备,下面结合附图对该设备进行介绍。请参见图16所示,本技术实施例提供了一种设备,该设备还可以是终端设备,该终端设备可以为包括手机、平板电脑、个人数字助理(personal digital assistant,简称pda)、销售终端(point of sales,简称pos)、车载电脑等任意智能终端,以终端设备为手机为例:
[0200]
图16示出的是与本技术实施例提供的终端设备相关的手机的部分结构的框图。参考图16,手机包括:射频(radio frequency,简称rf)电路710、存储器720、输入单元730、显示单元740、传感器750、音频电路760、无线保真(wireless fidelity,简称wifi)模块770、处理器780、以及电源790等部件。本领域技术人员可以理解,图16中示出的手机结构并不构
成对手机的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
[0201]
下面结合图16对手机的各个构成部件进行具体的介绍:
[0202]
rf电路710可用于收发信息或通话过程中,信号的接收和发送,特别地,将基站的下行信息接收后,给处理器780处理;另外,将设计上行的数据发送给基站。通常,rf电路710包括但不限于天线、至少一个放大器、收发信机、耦合器、低噪声放大器(low noise amplifier,简称lna)、双工器等。此外,rf电路710还可以通过无线通信与网络和其他设备通信。上述无线通信可以使用任一通信标准或协议,包括但不限于全球移动通讯系统(global system of mobile communication,简称gsm)、通用分组无线服务(general packet radio service,简称gprs)、码分多址(code division multiple access,简称cdma)、宽带码分多址(wideband code division multiple access,简称wcdma)、长期演进(long term evolution,简称lte)、电子邮件、短消息服务(short messaging service,简称sms)等。
[0203]
存储器720可用于存储软件程序以及模块,处理器780通过运行存储在存储器720的软件程序以及模块,从而执行手机的各种功能应用以及数据处理。存储器720可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序(比如声音播放功能、图像播放功能等)等;存储数据区可存储根据手机的使用所创建的数据(比如音频数据、电话本等)等。此外,存储器720可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他易失性固态存储器件。
[0204]
输入单元730可用于接收输入的数字或字符信息,以及产生与手机的用户设置以及功能控制有关的键信号输入。具体地,输入单元730可包括触控面板731以及其他输入设备732。触控面板731,也称为触摸屏,可收集用户在其上或附近的触摸操作(比如用户使用手指、触笔等任何适合的物体或附件在触控面板731上或在触控面板731附近的操作),并根据预先设定的程式驱动相应的连接装置。可选的,触控面板731可包括触摸检测装置和触摸控制器两个部分。其中,触摸检测装置检测用户的触摸方位,并检测触摸操作带来的信号,将信号传送给触摸控制器;触摸控制器从触摸检测装置上接收触摸信息,并将它转换成触点坐标,再送给处理器780,并能接收处理器780发来的命令并加以执行。此外,可以采用电阻式、电容式、红外线以及表面声波等多种类型实现触控面板731。除了触控面板731,输入单元730还可以包括其他输入设备732。具体地,其他输入设备732可以包括但不限于物理键盘、功能键(比如音量控制按键、开关按键等)、轨迹球、鼠标、操作杆等中的一种或多种。
[0205]
显示单元740可用于显示由用户输入的信息或提供给用户的信息以及手机的各种菜单。显示单元740可包括显示面板741,可选的,可以采用液晶显示器(liquid crystal display,简称lcd)、有机发光二极管(organic light-emitting diode,简称oled)等形式来配置显示面板741。进一步的,触控面板731可覆盖显示面板741,当触控面板731检测到在其上或附近的触摸操作后,传送给处理器780以确定触摸事件的类型,随后处理器780根据触摸事件的类型在显示面板741上提供相应的视觉输出。虽然在图16中,触控面板731与显示面板741是作为两个独立的部件来实现手机的输入和输入功能,但是在某些实施例中,可以将触控面板731与显示面板741集成而实现手机的输入和输出功能。
[0206]
手机还可包括至少一种传感器750,比如光传感器、运动传感器以及其他传感器。具体地,光传感器可包括环境光传感器及接近传感器,其中,环境光传感器可根据环境光线的明暗来调节显示面板741的亮度,接近传感器可在手机移动到耳边时,关闭显示面板741和/或背光。作为运动传感器的一种,加速计传感器可检测各个方向上(一般为三轴)加速度的大小,静止时可检测出重力的大小及方向,可用于识别手机姿态的应用(比如横竖屏切换、相关游戏、磁力计姿态校准)、振动识别相关功能(比如计步器、敲击)等;至于手机还可配置的陀螺仪、气压计、湿度计、温度计、红外线传感器等其他传感器,在此不再赘述。
[0207]
音频电路760、扬声器761,传声器762可提供用户与手机之间的音频接口。音频电路760可将接收到的音频数据转换后的电信号,传输到扬声器761,由扬声器761转换为声音信号输出;另一方面,传声器762将收集的声音信号转换为电信号,由音频电路760接收后转换为音频数据,再将音频数据输出处理器780处理后,经rf电路710以发送给比如另一手机,或者将音频数据输出至存储器720以便进一步处理。
[0208]
wifi属于短距离无线传输技术,手机通过wifi模块770可以帮助用户收发电子邮件、浏览网页和访问流式媒体等,它为用户提供了无线的宽带互联网访问。虽然图16示出了wifi模块770,但是可以理解的是,其并不属于手机的必须构成,完全可以根据需要在不改变发明的本质的范围内而省略。
[0209]
处理器780是手机的控制中心,利用各种接口和线路连接整个手机的各个部分,通过运行或执行存储在存储器720内的软件程序和/或模块,以及调用存储在存储器720内的数据,执行手机的各种功能和处理数据,从而对手机进行整体监控。可选的,处理器780可包括一个或多个处理单元;优选的,处理器780可集成应用处理器和调制解调处理器,其中,应用处理器主要处理操作系统、用户界面和应用程序等,调制解调处理器主要处理无线通信。可以理解的是,上述调制解调处理器也可以不集成到处理器780中。
[0210]
手机还包括给各个部件供电的电源790(比如电池),优选的,电源可以通过电源管理系统与处理器780逻辑相连,从而通过电源管理系统实现管理充电、放电、以及功耗管理等功能。
[0211]
尽管未示出,手机还可以包括摄像头、蓝牙模块等,在此不再赘述。
[0212]
在本实施例中,该终端设备所包括的处理器780还具有以下功能:
[0213]
确定目标车辆到达第一位置时在道路中所处的第一目标车道,所述第一位置为所述道路中目标区域在所述目标车辆的行驶方向上的起始位置,所述目标区域在所述第一位置所包括车道的第一车道数量与所述目标区域在第二位置所包括车道的第二车道数量不同,所述第二位置为所述目标区域在所述目标车辆的行驶方向上的结束位置;
[0214]
获取所述目标车辆在所述目标区域内对应的车辆运动数据和路况图像数据;
[0215]
根据所述车辆运动数据、所述路况图像数据和所述第一目标车道,确定所述目标车辆离开所述第二位置之前所对应的第二目标车道。
[0216]
本技术实施例还提供一种服务器,请参见图17所示,图17为本技术实施例提供的服务器800的结构图,服务器800可因配置或性能不同而产生比较大的差异,可以包括一个或一个以上中央处理器(central processing units,简称cpu)822(例如,一个或一个以上处理器)和存储器832,一个或一个以上存储应用程序842或数据844的存储介质830(例如一个或一个以上海量存储设备)。其中,存储器832和存储介质830可以是短暂存储或持久存
储。存储在存储介质830的程序可以包括一个或一个以上模块(图示没标出),每个模块可以包括对服务器中的一系列指令操作。更进一步地,中央处理器822可以设置为与存储介质830通信,在服务器800上执行存储介质830中的一系列指令操作。
[0217]
服务器800还可以包括一个或一个以上电源826,一个或一个以上有线或无线网络接口850,一个或一个以上输入输出接口858,和/或,一个或一个以上操作系统841,例如windows servertm,mac os xtm,unixtm,linuxtm,freebsdtm等等。
[0218]
上述实施例中由服务器所执行的步骤可以基于图17所示的服务器结构。
[0219]
本技术实施例还提供一种计算机可读存储介质,用于存储计算机程序,该计算机程序用于执行前述各个实施例所述的定位方法中的任意一种实施方式。
[0220]
本领域普通技术人员可以理解:实现上述方法实施例的全部或部分步骤可以通过程序指令相关的硬件来完成,前述程序可以存储于一计算机可读取存储介质中,该程序在执行时,执行包括上述方法实施例的步骤;而前述的存储介质可以是下述介质中的至少一种:只读存储器(英文:read-only memory,缩写:rom)、ram、磁碟或者光盘等各种可以存储程序代码的介质。
[0221]
需要说明的是,本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于设备及系统实施例而言,由于其基本相似于方法实施例,所以描述得比较简单,相关之处参见方法实施例的部分说明即可。以上所描述的设备及系统实施例仅仅是示意性的,其中作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
[0222]
以上所述,仅为本技术的一种具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。