1.本发明涉及通信技术领域,尤其涉及一种入射角(aoa)/发射角(aod)的方位角估算系统、方法、装置、定位方法及存储介质。
背景技术:
2.如今,毫米波(mm-wave)无线通信作为5g移动网络高速率数据传输需求的重要解决方案。利用毫米波的数据传输高速率,为整合多个网络铺平了道路,例如多媒体、虚拟现实(vr)、增强现实(ar)、机器对机器(m2m)、物联网(iot)、汽车、智能城市等。
3.为了提供令人满意的服务质量,需要频繁的进行通道估计和波束成形,以补偿巨大的传播损失并在低延迟要求下实时访问网络。
4.波束成形(bf)控制通过设置多个天线元件的辐射信号相位而形成的最佳波束方向,并根据最佳波束方向最大化传输速率。基于估计整个通道状态信息(csi) 的毫米波bf方案遭受高计算负荷和大开销。需要在无线传输系统中的主设备和从设备之间建立并保持健壮的rf链路。
5.目前,在毫米波频段的通信系统中,若能使收发双方在通信开始时就可以根据自身位置信息及基站提供的入射角及发射角与位置之间的对应关系数据库确定彼此来波方向,如aoa(angle of arrival,入射角)或aod(angle of departure,发射角),则收发双方的通信链路可以快速建立。然而,目前在基站涵盖范围内测量毫米波信号的入射角及发射角与位置之间对应关系的测量方法过于复杂,且测量装置过于复杂沉重。
技术实现要素:
6.鉴于以上内容,有必要提供一种入射角(aoa)/发射角(aod)方位角的估算系统、方法、装置、定位方法及存储介质,以简化方位角测量的估算步骤,实现aoa/aod方位角的快速测量。
7.本技术第一方面提供一种aod方位角估算系统,包含:第一发射电路,用于以发射角度传输信号;第一接收电路,用于依序切换波束指向方位角以接收所述信号;及估算电路,用于:计算所述第一接收电路于所述多个波束指向方位角接收到所述信号的多个信号功率;确定所述多个信号功率中的最大信号功率,依据所述最大信号功率对应的方位角,确定预判aod,以及依据所述预判aod以及所述多个方位角中邻近所述预判aod的至少一个方位角接收信号电平,比如最接近所述预判aod左右相邻的两个方位角,并计算得到最终 aod。依据所述得到最终aod的计算方法,估算电路依据第一发射电路的发射信号及第一接收电路的接收信号也可计算得到最终aoa。
8.在一些实施例中,所述估算电路进一步用于:获取所述预判aod的左右两个方位角所对应的接收信号电平,并依据如下公式将所述两个邻近方位角的接收信号电平计算为和信号与差信号
[0009][0010][0011]
其中,sa及sb分别为邻近所述预判aod的两个邻近方位角,所对应的接收信号电平,d是所述第一接收电路中两个相邻天线元件之间的元件间距,为最终aod与最大信号功率所对应的方位角之间的偏离角度误差值。
[0012]
依据如下公式获取偏离角度误差值可以表示为:
[0013][0014]
其中,kf为校正所得的斜率参数;依据偏离角度及最大信号功率对应的方位角计算最终aod。
[0015]
在一些实施例中,所述估算电路进一步用于:通过如下公式获取校正所得的斜率参数:其中,θ
bw
为天线的半功率波束宽度并做为所述第一接收电路的相邻两个方位角的间距角度。
[0016]
在一些实施例中,所述估算电路进一步用于:获取所述接收电路的偏移校准值;依据所述偏移校准值调整所述最终aod。在一些实施例中,所述aod 估算系统进一步包括第二发射电路,用于以发射角度传输信号,或所述aod 估算系统进一步包括第二接收电路,用于依序切换多个波束指向方位角,达成多方位角接收所述第一发射电路发送的信号,作为aod方位角估测依据。
[0017]
在一些实施例中,所述aod估算系统进一步包括:时间电路,用于获取所述信号的传输时间;定位电路,用于依据所述传输时间确定所述信号的传输距离,依据所述传输距离及所述最终aod确定第一发射电路或所述第一接收电路的位置。
[0018]
本技术第二方面提供能一种aod估算方法,所述方法包括:依序切换多个波束指向方位角,达成以多个方位角接收信号,所述信号具有预设发射角度;计算依据所述多个方位角接收到所述信号对应的多个信号功率;确定所述多个信号功率中的最大信号功率;依据所述最大信号功率对应的方位角,确定预判 aod;依据该预判aod以及所述多个方位角中该预判aod的相邻两个方位角,计算得到最终aod。
[0019]
在一些实施例中,所述依据该预判aod以及所述多个方位角中该预判 aod的左右相邻两个方位角,计算得到最终aod,具体包括:获取所述预判 aod的相邻两个方位角的信号电平;依据如下公式获取两个所述信号电平的和信号与差信号:
[0020][0021]
其中sa及sb分别为该预判aod的左右相邻两个方位角的信号电平,d 是两个相邻天线元件之间的元件间距,为aod与最大信号功率对应的方位角之间的偏离角度;依据如下公式获取aod与最大信号功率对应的方位角之间的偏离角度其中,kf为校正所得的斜率参数;依据偏离角度及最大信号功率对应的方位角计算最终aod。
[0022]
在一些实施例中,所述方法还包括:通过如下公式获取校正所得的斜率参数:
其中,θ
bw
为接收电路相邻两个方位角的间距角度。
[0023]
在一些实施例中,所述方法还包括:获取所述接收电路的偏移校准值;依据所述偏移校准值调整所述aod。
[0024]
本技术第三方面提供一种定位方法,包括:应用上述实施例所述的aod 估算方法以获取最终aod;依据最终aod确定所述待定位设备的位置,其中所述待定位设备可为所述信号的发射电路或接收电路。
[0025]
本技术第四方面提供一种aod估算装置,所述aod估算装置包括:内存、处理器和通讯汇流排,所述内存通过所述通讯汇流排与所述处理器通信连接;以及所述内存中存储有多个程序电路,所述多个程序电路由所述处理器加载并执行如上述实施所述的aod估算方法。
[0026]
本技术第五方面提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例所述的aod估算方法。
[0027]
本技术中,所述方位角估算系统,通过依序切换多个方位角以接收信号;并确定接收到的多个信号的信号功率中的最大信号功率,依据所述最大信号功率对应的方位角,确定预判aod,依据所述预判aod以及所述多个方位角中该预判aod的相邻两个相方位角的信号电平,并计算得到最终aod,如此简化了aod的估算步骤,实现aod的快速测量,提升了aod的估算精度。
附图说明
[0028]
为让本揭示的上述和其他目的、特征、优点与实施例能够更明显易懂,附图的说明如下:
[0029]
图1为本发明一实施方式的极坐标中时序波瓣算法的图形示例;
[0030]
图2a为本发明一实施方式中应用时序波瓣算法的功能电路图;
[0031]
图2b为本发明一实施方式中应用的功能电路图;
[0032]
图3为本发明一实施方式中通道探测器系统的电路示意图;
[0033]
图4为本技术一实施方式中的毫米波天线电路的示意图;
[0034]
图5a为本技术一实施方式中的时序波瓣算法的实现架构图;
[0035]
图5b为本技术一实施方式中目标位于天线视线轴产生相同幅度的信号电平示意图;
[0036]
图6a为本技术另一实施方式中的时序波瓣算法的实现架构图;
[0037]
图6b为本技术一实施方式中的目标偏离天线视线轴线产生不相同幅度的信号电平的示意图;
[0038]
图7为本发明一实施方式中的阵列将天线波束指向角切换到两个方向的方位偏离角误差的示意图;
[0039]
图8为本发明一实施方式中毫米波天线电路架构的天线辐射场型模拟图;
[0040]
图9为本发明一实施方式中毫米波天线电路架构的天线辐射场型模拟比较图;
[0041]
图10为本发明一实施方式中通道探测系统硬件架构设计示意图;
[0042]
图11为本发明一实施方式中波束扫描指向的天线辐射场型模拟图;
[0043]
图12为本发明一实施方式中依序两波束扫描指向的天线辐射场型模拟图;
[0044]
图13为本发明一实施方式中应用时序波瓣算法估算方位角误差并计算的横向位移变化的数值分析模拟结果;
[0045]
图14为本发明一实施方式中执行10万次蒙地卡罗数值模拟分析结果图;
[0046]
图15为本发明一实施方式中试验装置示意图;
[0047]
图16为本发明一实施方式中aod估算系统的电路示意图;
[0048]
图17为本发明一实施方式中定位系统的示意图;
[0049]
图18为本发明一实施方式中定位系统另一状态的示意图;
[0050]
图19为本发明另一实施方式中aod估算系统的电路示意图;
[0051]
图20为本发明一实施方式中aod估算方法的流程图;
[0052]
图21为本发明一实施方式中获取最终aod的流程图;以及
[0053]
图22为本发明一实施方式中aod估算装置的示意图。
具体实施方式
[0054]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0055]
需要说明的是,当一个元件被称为“电连接”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“电连接”另一个元件,它可以是接触连接,例如,可以是导线连接的方式,也可以是非接触式连接,例如,可以是非接触式耦合的方式。
[0056]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0057]
下面结合附图,对本发明的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
[0058]
本技术提供一种基于时序波瓣算法估算aod/aoa方位角度的方法,又以aod方位角度估测方法做为范例说明。其中,时序波瓣算法为:在不同时序依次交替切换多输入多输出(mimo)系统的天线波束,以估测目标方位角度的算法,也称之为时序切换算法(sequential switching)和波瓣算法(lobe switching)。本技术通过时序波瓣算法检测目标物的角度方向的信息,操作简单,运算精简,可以实现高精度地定位目标。
[0059]
示例性地,请参见图1,图1为极坐标中时序波瓣算法的图形示例,天线波束交替在位置1和位置2之间切换,通过时序波瓣算法估算目标天线的目标角度。
[0060]
为了便于理解,将本技术供的时序波瓣算法与单脉冲算法(mono pulsealgorithm)进行比较,两种方法的区别在于硬件设计和实现的速率,其中图2b 为使用单脉冲算法的通道探测系统的功能框图,该方法需要两个功率分配网络 (power distribution network,pdn)才能实现两个输出,一个是总通道,另一个是不同通道。将引入硬件设计的额
外成本和复杂性。由于两个通道(sum和diff) 同时运行,单脉冲算法的数据速率高于连续测波法的数据速率。
[0061]
请参见图2a,图2a为使用时序波瓣算法的功能电路图,该设备包括n个毫米波天线、n个前端电路(fem),功率分配网络将毫米波信号从升/降频转换器(up/down-converter,udc)传递到每个前端射频电路(fem)。udc(升/降频转换器)包含一个升频转换器,用于将调变的中频(if)信号转换频率,将其升频成为调变的毫米波辐射信号,以及一个降频转换器将接收的毫米波信号转换频率,将其降频成为用于检测的调变的中频(if)信号。射频合成器(rf synthesizer) 生成本地振荡信号,以馈入udc,做为升降频器的主要射频信号。
[0062]
请参见图2b,该设备包括n个毫米波天线、n个前端电路(fem)系列及两个功率分配网络(pdn1和pdn2),两个功率分配网络将毫米波信号从升/降频转换器(udc)传递到每个相对应的fem中。在传输模式下,180
°
混合耦合器 (180
°
hybrid)作为和(sum)信号及差(diff)信号功率分配器。在发射模式,180
°
混合耦合器工作在平衡模式(或称为和(sum)通道模式),将两路信号以同相位及等功率的方式,将毫米波信号从udc分配至pdn1及pdn2。在接收模式下, 180
°
混合耦合器可以同时工作于平衡模式形成和(sum)通道,以及工作于不平衡模式;将两个pdn输出的接收毫米波信号以等功率反相位(相差180
°
)方式组合差(diff)通道因此可以使用单脉冲算法同时估计方位角度信息。
[0063]
请参见图3,图3为本技术一实施例中的通道探测器系统(millimeter-wavechannel sounder system)的电路示意图,其中,基带电路可为,ni-mts还可作为通道探测器系统的主控计算机单元;毫米波升降频电路(fih mmw head;adiadmv 1018),毫米波升降频电路用于将基带信号升频至毫米波信号,或将毫米波信号降频至基带信号;毫米波天线电路(aim)为mimo毫米波天线电路,由32(2
×
16)组天线与8颗前端射频电路(front-end module,fem)制作而成的集成电路板(printed circuit board,pcb)。前端射频电路为集成电路(integratedcircuits,ics),由4链路通道的收发电路所组成,每一收发集成电路均包含放大器(或低噪声功放)、相移器及衰减器;如此,以使通道探测器系统可通过spi 指令驱动前端电路实现波束赋形功能。
[0064]
请同时参见图4(a)、图4(b)及图4(c),图4(a)为毫米波天线电路的设计图,图4(b)为pcb堆叠图,图4(c)为成品照相图。
[0065]
其中,如图4(a)所示,毫米波天线电路包括多组微带贴片天线电路,贴片电阻(chip resistor)、波束成型器(beam former)及混合耦合器(hybrid coupler)。天线电路系由4个微带贴片天线及一个毫米波射频前端电路(fem)所组成。
[0066]
其中,图4(b)中贴片天线安装在8层电路板上,8层电路板分别为:第一层为顶层,第二层为射频层,第三层为接地层,第四层为电源层,第五层为输入输出层,第六层为接地层,第七层为射频层,第八层为底层,同时图4(b)还示意出了各层的厚度。
[0067]
其中,图4(c)中电路板包括四个平行外接埠端口、8毫米波射频前端电路 (fem)芯片、散热元件及电源接口。
[0068]
请参见图5a与图5b,图5a是时序波瓣算法的实现架构图,图5b为目标位于天线视线(los)轴产生相同幅度eo的信号电平示意图。在天线视线轴(line of sight,los)的两个预定对称位置之间,依序切换天线的笔形波束,可以估算目标角度。也就是说,经由天线波
束在两个方位角之间依序切换,通道探测器系统可测量因为方位角差异所产生的误差信号数值,并加以估计角度误差值其中,如图5b所示,信号电平为零误差,例如,当目标物位于天线视线上,如图5a和5b所示,天线笔形波束(pencil beam)a及b将接收到两个具有相同幅度eo的信号电平(零误差信号)的电磁反射波。因此,目标的角度误差值为天线笔形波束a和b之间的平均值;
[0069]
当目标物偏离天线视线轴(如图5a和5b所示,目标物位于位置b时),随着天线笔形波束往b方向上切换时,从目标返回的信号电平幅度增至最大值,笔形波束方向往a波束切换时,从目标返回的信号电平将由幅度最大值递减的最小值。
[0070]
因此目标物回波信号电平的幅度不同,从波束b位置的最大值与到波束a 位置的最小值之间呈现振幅变化。换句话说,幅度调制(am)存在于回波信号的包络。此am包络调变信号是相对应于波束b及波束a之间目标的相对位置变化。也即,角度误差值是可以经由提取的am包络,加以估测,而电压差的符号决定了角度误差的方向。
[0071]
在一实施例中,如图6a所示,毫米波天线电路具有均匀分布的阵列天线,阵列天线的波束指向方位角度依序在
±
θ0之间切换。图6b为目标偏离天线视线轴线产生不相同幅度的信号电平,即存在误差信号的信号电平,如果目标方位偏离视轴(boresight)方位角误差为则对应于两天线波束指向所侦测的返回信号电平,两组信号电平分别表示为:
[0072][0073][0074]
其中,为目标方位偏离视轴(boresight)的方位角误差,d为是两个相邻天线之间的元件间距,-θ0及 θ0分别为两个天线的指向角度。
[0075]
两个天线波束指向的返回信号电平(sa和sb)的和信号与差信号,分别为:
[0076][0077][0078]
当目标方位偏离视轴线所产生的方位角误差位于方位角度
±
θ0之间,属于小角度偏差值,可应用如下公式估算方位角误差:
[0079][0080]
其中d是两个相邻天线元件之间的元件间距,kf为校正所得的斜率参数。
[0081]
其中图7为将阵列天线波束指向角切换到两个相邻方位角且目标方位偏离角误差的示意图。其中两个电线波束的方位角分别为-θ0和 θ0,且目标方位偏离角误差为sa和sb分别为两个电线波束对应信号的信号电平,d为是两个相邻天线之间的元件间距。
[0082]
其中图8和图9分别是应用32组天线对图6所示的毫米波天线电路进行数值类比分
析,图7为毫米波天线电路的天线辐射场型模拟图,显示天线电路的水平/垂直半功率波束宽(half-power beam width,hpbw,半功率波束宽度,即3db波束宽度)为3
°
/36
°
。阵列天线的相位误差呈均匀分布状态且峰值变量在
±
60
°
之间,图9为毫米波天线电路的天线辐射场型模拟比较图,由图9可知,相位误差会造成阵列天线场型的旁波瓣峰值升高、波束指向微幅偏移及增益降低。
[0083]
请参见图10,图10为通道探测系统硬件架构设计示意图,通道探测系统包括发射电路和接收电路,发射电路和接收电路均包括基带电路、毫米波升降频电路和毫米波天线电路。
[0084]
其中,毫米波天线电路包括2
×
16组毫米波天线。
[0085]
其中发射电路和接收电路通过毫米波信号建立通信连接,发射电路和接收电路可以是位于结构不同的通讯装置上,也可以是位于结构相同的通讯装置上。例如,发射电路可以是位于毫米波基站等通讯装置上,接收电路可以是位于手机等通讯装置上;发射电路可以是位于手机等通讯装置上,接收电路可以是位于毫米波基站通讯装置上;或者所述发射电路和接收电路均为位于毫米波基站及/或手机等通讯装置上。
[0086]
具体地,发射电路在特定时序时将天线波束指向aod方位角度并发射信号,接收电路依照协议时序在波束扫描范围内,以半功率波束宽度为间距,依序切换不同的波束指向并接收对应指向的信号。
[0087]
在一实施例中,发射电路发送的载波信号频率为28ghz,基频信号为带宽 800mhz的zcpn脉波(sequence)。依照半功率波束宽度(即θ
bw
=3
°
),需31个不同的波束指向即可涵盖 60
°
的波束扫描范围。
[0088]
在一实施例中,通道探测器系统接收电路的阵列天线波束扫描四个扫描区域,每个区域具有至少一组阵列天线。控制所述阵列天线的系统会依照设定方位角进行扫描并接收发射电路所发送的毫米波信号。本实施方式中,所述区域的阵列天线为16的天线结构。
[0089]
通道探测器系统接收电路的阵列天线波束扫描四个扫描区域,每个区域具有至少一组阵列天线。控制所述阵列天线的系统会依照设定方位角进行扫描并接收发射电路所发送的毫米波信号。
[0090]
本实施方式中,在接收电路的三个扫描区中的阵列天线在预设循环扫描时间内进行扫描并以不同的入射角度接收发射电路发送的毫米波信号时,所述三个扇区分别在0~120度、120~240度及240~360度中通过扫描区域中的阵列天线以不同的波束的入射角度接收发射电路发送的毫米波信号。
[0091]
以图10为例说明,接收电路依序切换不同的波束指向并接收波束1,波束 2,波束3,波束4及波束5,5个方位的信号,并计算各方位接收信号的信号功率(carrier-to-interference ratio,cir),各方位的信号功率依序为p1、p2、p3、 p4及p5。
[0092]
图11为5个波束扫描指向的天线辐射场型模拟图,其中5个波束的指向角度依次为-6
°
、-3
°
、0、 3
°
及 6
°
。
[0093]
请再次参见图10,接收电路的波束3方位指向与接收电路发射信号方位指向最接近,因此经接收电路计算并判断可知:波束3方位指向的信号功率p3 为五个接收信号中的最大值,即aod方位角度位于波束3方位与相邻波束指向(θ3 θ
bw
)之间,然后应用时序波瓣算法,接收电路依序接收两个不同波束指向(0
°‑
1.5
°
及0
°
1.5
°
)信号(例如,波束2和波束4)。
[0094]
如图12所示。令及通过时序波瓣算法计算aod方位角度的估测值(例如:参见公式3)。
[0095]
在一实施例中,设定纵向距离(down-range;z轴线)为60米且横向位移 (cross-range;x轴线)变化在3米之间。图13为模拟结果说明图,实线e代表横向位移(cross-range;x轴线)所对应的aod方位角虚线f圆圈符号代表当发射电路横向位移时,模拟结果的aod方位角,比对显示与原设定的方位角会存在误差值,虚线g方形符号代表估测角度误差值。由数值分析模拟结果显示,应用时序波瓣算法所估算方位角的精度在0.5度之内。
[0096]
然而,在实测环境将会存在散射物的多重反射效应及噪声所导致的测量误差,因此,必须应用数值分析方式验证时序切换算法的可靠性。在一实施例中,假设所有环境因素所产生的测量误差值为零平均数(zero mean)的高斯分布(gaussian distribution),并设定三种不同标准误差值:2.5db、1.5db及0.5db。应用模拟建模(例如,matlab程序代码)并执行10万次蒙地卡罗数值模拟分析 (monte-carlo simulation),分析结果如图14所示。
[0097]
由图14中数值模拟分析结果可知,所估算方位角度的标准误差值(standarddeviation error)小于0.5度,也即当目标物位于距离60米处时,应用本方法所估测的aoa/aod方位误差值,皆小于0.53米。此角度估算精度优于卫星定位系统(定位精度小于1米)及蓝牙室内定位系统(定位精度在5米-20米之间)的定位精度,本技术提供的定位方法,在室外与导航卫星定位方法相比较,在室内与蓝牙定位相比较,定位方位角精度相对提升20%以上。
[0098]
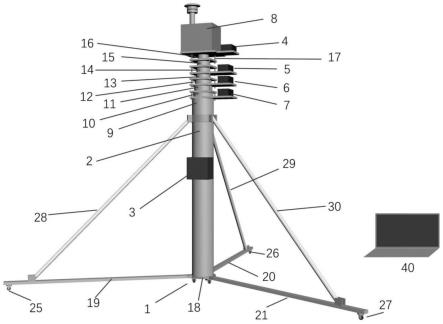
在一实施例中,图15为实验装置示意图,图15可应用于空中界面缩距场测试暗房中,空中接口缩距场测试暗房可提供稳定的场测环境,以验证时序波瓣算法的方位角估算精度。图15中应用远场平面波类比远处的目标物,同时,缩距场平面波效应可保证发射信号稳定,且不受毫米波严重的空间衰减损耗所影响。
[0099]
具体地,将毫米波天线电路(相当于图6中的接收电路)放置于ota测试暗房的旋转台上,经由旋转台旋转得以控制aod方位角度并由缩距场的反射面天线接收来自天线电路的发射信号。用二条同轴电缆线(k-band cables)将毫米波2x16组天线系统与缩距场反射面天线分别连接至4端口vna(向量网络分析仪),vna被用来取代ni/mts及fih mm-wave head,并执行通道探测系统的收发功能。测试系统的控制系统由外接的nb(或计算机)执行。将程序指令代码经由usb接口下达毫米波2x16主动阵列天线系统的波束指向(θ1、θ2、θ3、θ4或θ5)指令,由波束扫描控制器(例如,可由4个arduino mcu所组成) 将波束方位指令转换成spi数字控制脉波,并分送至毫米波2x16主动阵列天线系统中的每一个前端电路(fem),快速达成天线波束指向。另外、nb经由gpib 接口控制vna,将测试获得的s-参数计算转换为接收信号功率,记为p1、p2、 p3、p4及p5,再由接收到的最大功率预判aod方位角度大致范围后,应用时序切换算法,估测aod方位角度
[0100]
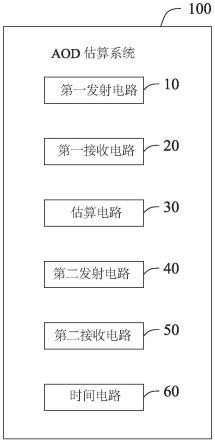
请参见图16,本技术一实施例中,aod估算系统100包括第一发射电路 10、第一接收电路20及估算电路30。
[0101]
具体地,第一发射电路10用于以发射角度传输信号;第一接收电路20用于依序切换多个方位角以接收所述信号;估算电路30用于:计算所述接收电路于所述多个方位角接
收到所述信号的多个信号功率;确定所述多个信号功率中的最大信号功率,依据所述最大信号功率对应的方位角,确定预判aod,以及依据所述预判aod以及所述多个方位角中邻近所述预判aod的两个方位角,计算得到最终aod。
[0102]
如此,aod估算系统100通过接收到的多个信号中的最大信号功率,确定与发送的信号的发射角度最接近的接收角度,依据与该接收角度相邻的两个方位角确定接收角度与发射角度之间的偏差值,依据该偏差值即接收角度即可确定最终aod。
[0103]
在一实施例中,所述估算电路30进一步用于:获取最接近所述预判aod 的两个方位角对应的信号电平;依据如下公式确定所述两个信号电平的和信号与差信号:
[0104][0105][0106]
其中,sa及sb分别为最接近所述预判aod的两个方位角对应的信号电平,d是所述接收电路中两个相邻天线元件之间的元件间距,为最终aod与最大信号功率对应的方位角之间的偏离角度;依据如下公式获取aod与最大信号功率对应的方位角之间的偏离角度
[0107][0108]
其中,kf为校正所得的斜率参数;依据偏离角度及最大信号功率对应的方位角计算最终aod。
[0109]
如此,第一发射电路10以发射角度传输信号;第一接收电路20依序切换多个波束指向的方位角,使依序接收到所述信号系来自多个不同方位的信号功率;估算电路30获取最接近所述预判aod的两个方位角对应的信号电平,并依据该信号电平及以上公式获取偏离角度,并依据偏离角度及预判aod确定最终aod。
[0110]
本技术一实施例中,所述估算电路30进一步用于:通过如下公式获取校正所得的斜率参数:
[0111][0112]
其中,θ
bw
为所述接收电路的相邻两个方位角的角度差。
[0113]
具体地,估算电路依据接收电路中的两组天线之间方位角的角度差确定斜率参数,并依据斜率参数调整偏离角度,依据偏离角度确定最终aod。
[0114]
在一实施例中,估算电路30进一步用于:获取所述接收电路的偏移校准值;依据所述偏移校准值调整所述最终aod。
[0115]
具体地,每个系统具有对应的误差偏移量,可以通过预设检测等方法获取 aod估算系统的误差偏移量,依据偏移量调整最终的aod,以提升aod的准确度。
[0116]
示例性的,偏移校准值为0.1
°
,若通过计算获得aod角度为29.9
°
,则实际的aod角度为30
°
。
[0117]
本技术一实施例中,aod估算系统100还包括第二发射电路40,第二发射电路40用于以发射角度传输信号。
[0118]
如此,通过第一发射电路10和第二发射电路40配合,分别获取第一接收电路20接收第一发射电路10发送的信号的第一aod和第一接收电路20接收第二发射电路40发送的信
号的第二aod,依据第一发射电路10的位置、第二发射电路40的位置、第一aod及第二aod可确认第一接收电路20的位置。
[0119]
请参见图17,图17示意图出一种定位系统的示意图。该定位系统包括两个基站和一个用户设备,两个基站在第一坐标系xy中的坐标分别为a1(o,811) 和a2(122,952);设定用户设备的位置为c。可通过时序波瓣算法获取a1c 和a2c之间的aod角度。
[0120]
具体地,将用户设备作为发射电路,将两个基站作为接收电路,通过上述实施例描述的时序波瓣算法获取aod1和aod2;获取aod1和aod2之间的差值,例如:aod1和aod2之间的差值
[0121]
然后,将第一坐标系xy中的定位系统的坐标转换为第二坐标系x
′y′
的坐标,例如,第二坐标系中两个基站的坐标分别为(0,0)和(186.5,0),则设定用户设备坐标的为(x’,y’),可通过以下公式获取用户设备的坐标:
[0122][0123][0124]
其中r2为基站a1与用户设备之间的距离,为aod1和aod2之间的差值,基站a1的坐标为(x1,y1)。
[0125]
请参见图18,x1=0;y=0;r2=1517.76,则通过上述公式可获取用户设备的坐标:x
′
=-154.6、y
′
=1510cm。
[0126]
然后依据基站的坐标确定两个坐标系之间的关联关系,并依据关联关系获取用户设备在第一坐标系xy中的坐标。例如:x=1165.6cm、y=-139.6cm。
[0127]
可以理解,图17和图18仅为本技术提供的一种定位系统获取用户设备位置的方法,可以理解,上述实施例仅为本技术提供的一种定位方式,本技术获取接收电路或发射电路的方式不限于上述实施例提供的方式。
[0128]
本实施例中,aod估算系统100包括第一发射电路10、第一接收电路20、估算电路30及第二发射电路40,第一发射电路10及第二发射电路40的位置固定且已知,可通过两个发射电路的位置确定第一接收电路20的位置。同理,在另一实施例中,如图19所示,aod估算系统100可包括第一发射电路10、第一接收电路20、估算电路30及第二接收电路50,第一接收电路20及第二接收电路50的位置固定且已知,可通过两个接收电路的位置确定第一发射电路 10的位置。同理,在另一实施例中,可通过已知的两个电路(发射/发射、发射 /接收、或接收/接收)位置确定另一电路(发射或接收)的位置。
[0129]
在一实施例中,aod估算系统100还包括时间电路60,时间电路60用于信号的传输时间,即发射电路发送该信号至接收电路接收该信号之间信号的传输时间。另信号的传输速度为已知,可通过传输时间及传输速度获取发射电路和接收电路之间的距离。
[0130]
具体地,在一实施例中,发射电路发送的信号携带有第一时间信息,第一时间信息包括发射电路发送该信号的时间,接收电路接收该信号之后,时间电路生成第二时间信息,第二时间信息包括接收电路接收该信号的时间。依据第一时间信息和第二时间信息确认信号的传输时间,依据传输时间及预设的速度信息确定发射电路和接收电路之间的距离。
[0131]
如此,可通过接收电路和发射电路组成一组aod系统,以获取对应的aod,并依据对应的aod、至少两个接收电路的位置确定发射电路的位置。
[0132]
接收电路及估算电路属于不同的电路且具有不同的功能。如图16所示的实施例中,第一接收电路20及估算电路30为一体式设置,执行信号接收和aod 估算的功能。同理,如图19所示的实施例中,第一接收电路20及估算电路30 为一体式设置,且第二接收电路50及估算电路30也为一体式设置,执行信号接收和aod估算的功能。
[0133]
请参见图20,为图19所示的实施例所提供的一种aod估算方法的流程图,根据不同需求,所述流程图中步骤的顺序可以改变,某些步骤可以省略或合并。所述方法包括如下步骤。该方法包括如下步骤。
[0134]
步骤s191、第一接收电路20依序切换多个波束指向的方位角来接收第一发射电路10所发射的信号,所述信号具有预设发射角度。
[0135]
具体地,发射电路以预设发射角度发送信号,接收电路依序切换多个方位角度以接收该信号。
[0136]
步骤s192、估算电路30计算依据所述多个波束指向的方位角所接收到所述信号对应来自多个不同方位角的信号功率。
[0137]
步骤s193、估算电路30确定所述多个信号功率中的最大信号功率。
[0138]
步骤s194、估算电路30依据所述最大信号功率对应的方位角,确定预判 aod。
[0139]
步骤s195、估算电路30依据该预判aod以及该多个方位角中邻近该预判aod的两个方位角,比如最接近所述预判aod左右相邻的两个方位角,计算得到最终aod。
[0140]
如此,通过接收到的多个信号的信号功率的最大信号功率确定对应的方位角,依据该方位角确定预判aod,依据预判aod及与该方位角相邻的方位角确定最终aod。
[0141]
在一实施例中,请参见图21,步骤s195具体包括以下步骤。
[0142]
步骤s1951、获取邻近所述预判aod的两个方位角的信号电平,比如最接近所述预判aod左右相邻的两个方位角。
[0143]
例如预判aod为30度,则与预判aod最接近的相邻两方位角可分别位于预判aod的两侧,即可分别为33度和27度。
[0144]
步骤s1952、依据公式一获取两个所述信号电平的和信号与差信号。
[0145]
其中公式为:
[0146][0147][0148]
其中sa及sb分别为邻近该预判aod的两侧相邻方位角的信号电平,d 是两个相邻天线元件之间的元件间距,为预判aod与最大信号功率对应的方位角之间的偏离角度。
[0149]
步骤s1953、依据公式二获取预判aod与最大信号功率对应的方位角之间的偏离角度
[0150]
其中公式二为:
[0151][0152]
其中,kf为校正所得的斜率参数;
[0153]
步骤s1954、依据偏离角度及最大信号功率对应的方位角计算最终aod。
[0154]
在一实施例中,所述的aod估算方法还包括:通过如下公式获取校正所得的斜率参
数:
[0155][0156]
其中,θ
bw
为接收电路相邻两个方位角的间距角度。
[0157]
在一实施例中,所述aod估算方法还包括:获取所述接收电路的偏移校准值;依据所述偏移校准值调整所述aod。
[0158]
进一步地,本技术还提供一种定位方法,所述定位方法包括:应用如上述实施例所述的aod估算方法获取最终aod;依据最终aod可确定待定位设备的位置,其中待定位设备可为信号的发送端,也可为信号的接收端。
[0159]
在一实施例中,定位方法还包括:获取所述信号的发送时间;获取所述信号的接收时间;依据发送时间、接收时间及预设的速度信息确定信号的传播距离;依据传播距离及最终aod确定待定位终端的位置。
[0160]
示例性地,不同信号在空气中的传播速度为已知的,例如声波或电磁波在空气的传播速度。
[0161]
图22为本技术一实施例所提供的aod估算装置的架构示意图。所述aod 估算装置1包括内存11、处理器12和通讯汇流排13,所述内存11通过所述通讯汇流排13与所述处理器12通信连接。
[0162]
所述aod估算装置1还包括存储在所述内存11中并可在所述处理器12 上运行的计算机程序14,例如aod估算的程序。
[0163]
所述处理器12执行所述计算机程序14时实现所述方法实施例中车位自动搜索方法的步骤。或者,所述处理器12执行所述计算机程序14实现所述系统实施例中各电路/单元的功能。
[0164]
示例性的,所述计算机程序14可以被分割成一个或多个电路/单元,所述一个或者多个电路/单元被存储在所述内存11中,并由所述处理器12执行,以完成本技术。所述一个或多个电路/单元可以是能够完成特定功能的一系列计算机程序指令段,所述指令段用于描述所述计算机程序14在所述aod估算装置1中的执行过程。
[0165]
可以理解地,所述图22仅仅是aod估算装置1的示例,并不构成对aod 估算装置1的限定,aod估算装置1可以包括比图标更多或更少的部件,或者组合某些部件,或者不同的部件,例如所述aod估算装置1还可以包括输入装置等。
[0166]
所称处理器12可以是中央处理单元(central processing unit,cpu),还可以包括其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现成可程序设计门阵列 (field-programmable gate array,fpga)或者其他可程序设计逻辑器件、分立门或者晶体管逻辑器件、分立硬件元件等。通用处理器可以是微处理器或者所述处理器也可以是任何常规的处理器等,所述处理器12是所述aod估算装置10 的控制中心,利用各种接口和线路连接整个aod估算装置10的各个部分。
[0167]
所述内存11可用于存储所述计算机程序14和/或电路/单元,所述处理器12通过运行或执行存储在所述内存11内的计算机程序和/或电路/单元,以及调用存储在内存11内的数据,实现所述aod估算装置1的各种功能。内存11可以包括外部存储介质,也可以包括内
存。此外,内存11可以包括高速随机存取内存,还可以包括非易失性内存,例如硬盘、内存、插接式硬盘、智能存储卡(smart media card,smc)、安全数字(secure digital,sd)卡、闪存卡 (flash card)、至少一个磁盘存储器件、闪存器件、或其他易失性固态内存件。
[0168]
所述aod估算装置1集成的电路/单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本技术实现所述实施例方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于计算机可读存储介质中,所述计算机程序在被处理器执行时,可实现所述各个方法实施例的步骤。需要说明的是,所述计算机可读介质包含的内容可以根据司法管辖区内立法和专利实践的要求进行适当的增减,例如在某些司法管辖区,根据立法和专利实践,计算机可读介质不包括电载波信号和电信信号。
[0169]
以上实施例仅用以说明本发明的技术方案而非限制,尽管参照以上较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换都不应脱离本发明技术方案的精神和范围。
[0170]
【符号说明】
[0171]
1:aod估算装置
[0172]
11:内存
[0173]
12:处理器
[0174]
13:通讯汇流排
[0175]
14:计算机程序
[0176]
100:aod估算系统
[0177]
10:第一发射电路
[0178]
20:第一接收电路
[0179]
30:估算电路
[0180]
40:第二发射电路
[0181]
50:第二接收电路
[0182]
60:时间电路。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。