1.本发明涉及自动上菜和防护技术领域,尤其涉及一种模块化人工智能传菜系统。
背景技术:
2.在火锅烧类烤酒店里,要将厨师配好的菜送到不同用餐位置,主要依靠人工传送,这种工作模式相对来讲已经较为普遍,而在同一楼层中,要将一道道美味佳肴送到客人的餐桌上,仍然是依靠服务员往来穿梭于各个餐桌之间,虽然存在一些水道传菜设备,这种设备还是存在诸多问题。
3.现有的模块化人工智能传菜系统,在对传送前还需要人工上菜,且在传菜途中没有对菜进行防护的功能,会导致传菜途中菜品掉落。
技术实现要素:
4.本发明的目的是为了解决现有的模块化人工智能传菜系统,在对传送前还需要人工上菜,且在传菜途中没有对菜进行防护的功能,会导致传菜途中菜品掉落的缺点,而提出的一种模块化人工智能传菜系统。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种模块化人工智能传菜系统,包括传送座,所述传送座的两侧内设有传送机构和防护机构,传送座的一侧设有上菜机构,上菜机构包括上菜座、连接转杆、第一锥齿轮、第一转动杆、第二锥齿轮、扇形齿轮、第二转动杆、驱动齿轮、圆形挡座、上菜推盘和第二皮带轮,上菜座与传送座的一侧固定连接,连接转杆、第一锥齿轮、第一转动杆、第二锥齿轮、扇形齿轮、第二转动杆和驱动齿轮均位于上菜座内,连接转杆与上菜座转动连接,第一锥齿轮与连接转杆固定连接,第一转动杆和第二转动杆均与上菜座转动连接,第二锥齿轮与第一转动杆的一端固定连接,第二锥齿轮与第一锥齿轮相啮合,扇形齿轮与第一转动杆固定连接,驱动齿轮与第二转动杆固定连接,驱动齿轮与扇形齿轮相啮合,圆形挡座与上菜座的顶部固定连接,上菜推盘与第二转动杆的一端固定连接,第二皮带轮位于上菜座的一侧,第二皮带轮与连接转杆的一端固定连接,防护机构包括两个边座、第一防护杆、第二防护杆、两个防护板、第一蜗轮、第二蜗轮、双边蜗杆、第一电机和边箱,两个边座分别位于传送座的两侧,边箱位于传送座的一端,两个边座分别与传送座的两侧固定连接,边箱与传送座的一端固定连接,第一蜗轮、第二蜗轮和双边蜗杆均位于边箱内。
7.优选的,所述第一防护杆和第二防护杆分别与两个边座转动连接,两个防护板分别与第一防护杆和第二防护杆固定连接,第一蜗轮和第二蜗轮分别与第一防护杆和第二防护杆的一端固定连接,双边蜗杆与边箱转动连接,双边蜗杆与第一蜗轮和第二蜗轮相啮合。
8.优选的,所述第一电机位于边箱的一侧,第一电机与边箱的一侧固定连接,第一电机的输出轴带动双边蜗杆固定连接。
9.优选的,所述传送机构包括第一转动轴、第二转动轴、第一传送柱、第二传送柱、传送带、置物板、两个辅助滑座、两个滑块、第一皮带轮、皮带、托板和第二电机,第一转动轴、
第二转动轴、第一传送柱、第二传送柱、传送带、置物板、两个辅助滑座和两个滑块均位于传送座内。
10.优选的,所述第一转动轴和第二转动轴均与传送座转动连接,第一传送柱和第二传送柱分别与第一转动轴和第二转动轴固定连接,传送带与第一传送柱和第二传送柱传动连接。
11.优选的,所述置物板与传送带固定连接,两个辅助滑座均与传送座固定连接,两个滑块分别与两个辅助滑座滑动连接,两个滑块均与置物板固定连接。
12.优选的,所述第一皮带轮与第一转动轴的一端固定连接,皮带与第一皮带轮和第二皮带轮传动连接。
13.优选的,所述托板位于传送座的一侧,托板与传送座固定连接,第二电机位于托板上,第二电机的输出轴与第一转动轴固定连接。
14.与现有技术相比,本发明的优点在于:
15.(1)本方案由于设置了第一转动轴带动第一皮带轮转动,第一皮带轮通过皮带带动第二皮带轮转动,第二皮带轮带动连接转杆转动,连接转杆通过第一锥齿轮带动第二锥齿轮转动,第二锥齿轮带动第一转动杆转动,第一转动杆通过扇形齿轮往复带动驱动齿轮转动,驱动齿轮带动上菜推盘转动,实现了上菜的目的。
16.(2)本方案由于设置了双边蜗杆带动第一蜗轮和第二蜗轮转动,第一蜗轮和第二蜗轮带动第一防护杆和第二防护杆转动,第一防护杆和第二防护杆带动两个防护板转动,实现了对菜进行防护的目的。
17.本发明结构简单,使用方便,上菜的同时可对菜进行传送,且可对菜进行防护,防止其掉落,方便人们使用。
附图说明
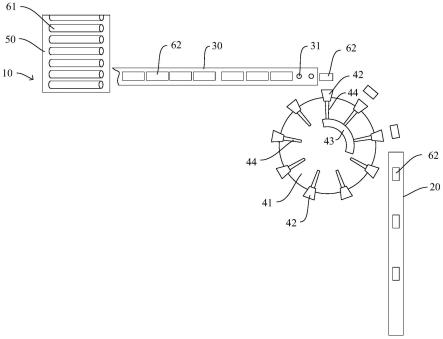
18.图1为本发明提出的一种模块化人工智能传菜系统的结构示意图;
19.图2为本发明提出的一种模块化人工智能传菜系统的上菜座的侧视结构示意图;
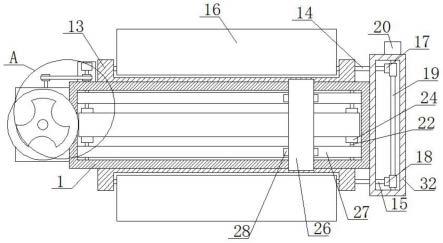
20.图3为本发明提出的一种模块化人工智能传菜系统的a部分结构示意图;
21.图4为本发明提出的一种模块化人工智能传菜系统的防护板的立体结构示意图;
22.图5为本发明提出的一种模块化人工智能传菜系统的辅助滑座的立体结构示意图。
23.图中:1、传送座;2、上菜座;3、连接转杆;4、第一锥齿轮;5、第一转动杆;6、第二锥齿轮;7、扇形齿轮;8、第二转动杆;9、驱动齿轮;10、圆形挡座;11、上菜推盘;12、第二皮带轮;13、边座;14、第一防护杆;15、第二防护杆;16、防护板;17、第一蜗轮;18、第二蜗轮;19、双边蜗杆;20、第一电机;21、第一转动轴;22、第二转动轴;23、第一传送柱;24、第二传送柱;25、传送带;26、置物板;27、辅助滑座;28、滑块;29、第一皮带轮;30、皮带;31、第二电机;32、边箱。
具体实施方式
24.下面将结合本实施例中的附图,对本实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实施例一部分实施例,而不是全部的实施例。
25.实施例一
26.参照图1-5,一种模块化人工智能传菜系统,包括传送座1,传送座1的两侧内设有传送机构和防护机构,传送座1的一侧设有上菜机构,上菜机构包括上菜座2、连接转杆3、第一锥齿轮4、第一转动杆5、第二锥齿轮6、扇形齿轮7、第二转动杆8、驱动齿轮9、圆形挡座10、上菜推盘11和第二皮带轮12,上菜座2与传送座1的一侧固定连接,连接转杆3、第一锥齿轮4、第一转动杆5、第二锥齿轮6、扇形齿轮7、第二转动杆8和驱动齿轮9均位于上菜座2内,连接转杆3与上菜座2转动连接,第一锥齿轮4与连接转杆3固定连接,第一转动杆5和第二转动杆8均与上菜座2转动连接,第二锥齿轮6与第一转动杆5的一端固定连接,第二锥齿轮6与第一锥齿轮4相啮合,扇形齿轮7与第一转动杆5固定连接,驱动齿轮9与第二转动杆8固定连接,驱动齿轮9与扇形齿轮7相啮合,圆形挡座10与上菜座2的顶部固定连接,上菜推盘11与第二转动杆8的一端固定连接,第二皮带轮12位于上菜座2的一侧,第二皮带轮12与连接转杆3的一端固定连接,防护机构包括两个边座13、第一防护杆14、第二防护杆15、两个防护板16、第一蜗轮17、第二蜗轮18、双边蜗杆19、第一电机20和边箱32,两个边座13分别位于传送座1的两侧,边箱32位于传送座1的一端,两个边座13分别与传送座1的两侧固定连接,边箱32与传送座1的一端固定连接,第一蜗轮17、第二蜗轮18和双边蜗杆19均位于边箱32内。
27.本实施例中,第一防护杆14和第二防护杆15分别与两个边座13转动连接,两个防护板16分别与第一防护杆14和第二防护杆15固定连接,第一蜗轮17和第二蜗轮18分别与第一防护杆14和第二防护杆15的一端固定连接,双边蜗杆19与边箱32转动连接,双边蜗杆19与第一蜗轮17和第二蜗轮18相啮合。
28.本实施例中,第一电机20位于边箱32的一侧,第一电机20与边箱32的一侧固定连接,第一电机20的输出轴带动双边蜗杆19固定连接。
29.本实施例中,传送机构包括第一转动轴21、第二转动轴22、第一传送柱23、第二传送柱24、传送带25、置物板26、两个辅助滑座27、两个滑块28、第一皮带轮29、皮带30、托板和第二电机31,第一转动轴21、第二转动轴22、第一传送柱23、第二传送柱24、传送带25、置物板26、两个辅助滑座27和两个滑块28均位于传送座1内。
30.本实施例中,第一转动轴21和第二转动轴22均与传送座1转动连接,第一传送柱23和第二传送柱24分别与第一转动轴21和第二转动轴22固定连接,传送带25与第一传送柱23和第二传送柱24传动连接。
31.本实施例中,置物板26与传送带25固定连接,两个辅助滑座27均与传送座1固定连接,两个滑块28分别与两个辅助滑座27滑动连接,两个滑块28均与置物板26固定连接。
32.本实施例中,第一皮带轮29与第一转动轴21的一端固定连接,皮带30与第一皮带轮29和第二皮带轮12传动连接。
33.本实施例中,托板位于传送座1的一侧,托板与传送座1固定连接,第二电机31位于托板上,第二电机31的输出轴与第一转动轴21固定连接。
34.实施例二
35.参照图1-5,一种模块化人工智能传菜系统,包括传送座1,传送座1的两侧内设有传送机构和防护机构,传送座1的一侧设有上菜机构,上菜机构包括上菜座2、连接转杆3、第一锥齿轮4、第一转动杆5、第二锥齿轮6、扇形齿轮7、第二转动杆8、驱动齿轮9、圆形挡座10、上菜推盘11和第二皮带轮12,上菜座2与传送座1的一侧焊接连接,连接转杆3、第一锥齿轮
4、第一转动杆5、第二锥齿轮6、扇形齿轮7、第二转动杆8和驱动齿轮9均位于上菜座2内,连接转杆3与上菜座2转动连接,第一锥齿轮4与连接转杆3焊接连接,第一转动杆5和第二转动杆8均与上菜座2转动连接,第二锥齿轮6与第一转动杆5的一端焊接连接,第二锥齿轮6与第一锥齿轮4相啮合,扇形齿轮7与第一转动杆5焊接连接,驱动齿轮9与第二转动杆8焊接连接,驱动齿轮9与扇形齿轮7相啮合,圆形挡座10与上菜座2的顶部焊接连接,上菜推盘11与第二转动杆8的一端焊接连接,第二皮带轮12位于上菜座2的一侧,第二皮带轮12与连接转杆3的一端焊接连接,防护机构包括两个边座13、第一防护杆14、第二防护杆15、两个防护板16、第一蜗轮17、第二蜗轮18、双边蜗杆19、第一电机20和边箱32,两个边座13分别位于传送座1的两侧,边箱32位于传送座1的一端,两个边座13分别与传送座1的两侧焊接连接,边箱32与传送座1的一端焊接连接,第一蜗轮17、第二蜗轮18和双边蜗杆19均位于边箱32内。
36.本实施例中,第一防护杆14和第二防护杆15分别与两个边座13转动连接,两个防护板16分别与第一防护杆14和第二防护杆15焊接连接,第一蜗轮17和第二蜗轮18分别与第一防护杆14和第二防护杆15的一端焊接连接,双边蜗杆19与边箱32转动连接,双边蜗杆19与第一蜗轮17和第二蜗轮18相啮合,双边蜗杆19可带动第一蜗轮17和第二蜗轮18转动。
37.本实施例中,第一电机20位于边箱32的一侧,第一电机20与边箱32的一侧焊接连接,第一电机20的输出轴带动双边蜗杆19焊接连接,第一电机20的输出轴可带动双边蜗杆19转动。
38.本实施例中,传送机构包括第一转动轴21、第二转动轴22、第一传送柱23、第二传送柱24、传送带25、置物板26、两个辅助滑座27、两个滑块28、第一皮带轮29、皮带30、托板和第二电机31,第一转动轴21、第二转动轴22、第一传送柱23、第二传送柱24、传送带25、置物板26、两个辅助滑座27和两个滑块28均位于传送座1内。
39.本实施例中,第一转动轴21和第二转动轴22均与传送座1转动连接,第一传送柱23和第二传送柱24分别与第一转动轴21和第二转动轴22焊接连接,传送带25与第一传送柱23和第二传送柱24传动连接,第一传送柱23可通过传送带25传动第二传送柱24转动。
40.本实施例中,置物板26与传送带25焊接连接,两个辅助滑座27均与传送座1焊接连接,两个滑块28分别与两个辅助滑座27滑动连接,两个滑块28均与置物板26焊接连接,置物板26可带动两个滑块28在两个辅助滑座27内滑动。
41.本实施例中,第一皮带轮29与第一转动轴21的一端焊接连接,皮带30与第一皮带轮29和第二皮带轮12传动连接,第一皮带轮29可通过皮带30传动第二皮带轮12转动。
42.本实施例中,托板位于传送座1的一侧,托板与传送座1焊接连接,第二电机31位于托板上,第二电机31的输出轴与第一转动轴21焊接连接,第二电机31的输出轴可带动第一转动轴21转动。
43.本实施例中,在使用此装置时,将菜放在圆形挡座10上,启动第二电机31,第二电机31的输出轴带动第一转动轴21转动,第一转动轴21带动第一皮带轮29转动,第一皮带轮29通过皮带30带动第二皮带轮12转动,第二皮带轮12带动连接转杆3转动,连接转杆3通过第一锥齿轮4带动第二锥齿轮6转动,第二锥齿轮6带动第一转动杆5转动,第一转动杆5带动扇形齿轮7转动,扇形齿轮7往复带动驱动齿轮9转动,驱动齿轮9带动上菜推盘11转动,并将菜推动至置物板26上,启动第一电机20,第一电机20的输出轴带动双边蜗杆19转动,双边蜗杆19带动第一蜗轮17和第二蜗轮18转动,第一蜗轮17和第二蜗轮18带动第一防护杆14和第
二防护杆15转动,第一防护杆14和第二防护杆15带动两个防护板16转动,并对菜进行防护,同时第一转动轴21带动第一传送柱23转动,第一传送柱23通过传送带25带动第二传送柱24转动,同时传送带25带动置物板26移动,置物板26带动两个滑块28在两个辅助滑座27内滑动,置物板26带动菜移动。
44.以上所述,仅为本实施例较佳的具体实施方式,但本实施例的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实施例揭露的技术范围内,根据本实施例的技术方案及其发明构思加以等同替换或改变,都应涵盖在本实施例的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。