技术特征:
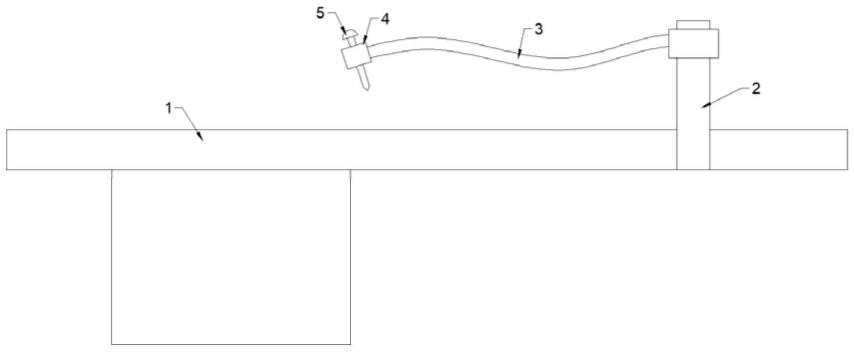
1.一种经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,包括机械操作部,所述机械操作部包括手术床(1)、安装座(2)、蛇形自由臂(3)、固定器(4)、穿刺针(5),所述安装座(2)安装于所述手术床(1)的侧部,所述蛇形自由臂(3)的第一端安装于所述安装座(2)上,所述蛇形自由臂(3)的第二端安装所述固定器(4),所述穿刺针(5)安装于所述固定器(4)上;所述蛇形自由臂(3)的第一端能够沿着所述安装座(2)向上或向下移动进行高度调整,在所述蛇形自由臂(3)的高度调整完成后,所述蛇形自由臂(3)的第一端与所述安装座(2)相固定;所述蛇形自由臂(3)的第二端能够朝向三维空间内的任意方向移动,在所述蛇形自由臂(3)的第二端移动到位后,所述固定器(4)固定所述穿刺针(5)。2.根据权利要求1所述的经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,还包括可视导航部,所述可视导航部包括x射线取像模块、建模模块、模拟穿刺模块;其中,所述x射线取像模块配置为基于c形臂x线机透视照射获取病人待穿刺处的透视影像,所述建模模块配置为基于所述x射线取像模块获取的透视影像对病人待穿刺处进行三维建模获取立体模型图像,所述模拟穿刺模块配置为基于所述建模模块建立的立体模型图像进行穿刺点定位和穿刺模拟。3.根据权利要求2所述的经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,该种经皮椎弓根穿刺针锚定位置及穿刺方向导航系统的工作方法包括以下步骤:x射线取像模块取像,c形臂x线机对以固定手术姿势在所述手术床(1)上的病人待穿刺处进行照射,获取待穿刺处的透视影像;建模模块建模,所述建模模块基于c形臂x线机透视照射获取的透视影像对待穿刺处进行三维建模,获取待穿刺处的立体模型图像;模拟穿刺模块模拟,所述模拟穿刺模块基于所述建模模块建立的立体模型图像进行模拟,模拟的内容包括穿刺点定位和穿刺模拟;将所述机械操作部的影像与立体模型图像进行合成,获取实时动态图像;穿刺姿态调整,所述蛇形自由臂(3)的第一端向上或向下移动至所述模拟穿刺模块模拟的穿刺点对应的高度处,所述蛇形自由臂(3)的第二端在三维空间内移动进行姿态调整,直至所述蛇形自由臂(3)的第二端处的穿刺针(5)的穿刺方向和对应的穿刺点在所述实时动态图像中与所述穿刺点定位和所述穿刺模拟的结果相重合。4.根据权利要求2或3所述的经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,所述安装座(2)上安装有高度调整驱动单元,所述蛇形自由臂(3)的第一端与所述高度调整驱动单元的输出端相连,所述高度调整驱动单元驱动所述蛇形自由臂(3)的第一端上移或下移;所述可视导航部还包括控制模块,所述控制模块与所述高度调整驱动单元控制连接,配置为控制所述高度调整驱动单元的输出量,用于对所述蛇形自由臂(3)的第一端上移或下移的位移量进行控制;所述控制模块与所述蛇形自由臂(3)控制连接,配置为控制所述蛇形自由臂(3)在三维空间内朝向的任意方向移动进行姿态调整。5.根据权利要求4所述的经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,所述高度调整驱动单元为无杆气缸。6.根据权利要求2或3所述的经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,所述蛇形自由臂(3)的第二端安装有微调关节单元,所述固定器(4)安装于所述微调关节单元上,所述微调关节单元驱动所述固定器(4)在x轴方向和z轴方向上做角度旋转;所
述可视导航部还包括控制模块,所述控制模块与所述微调关节单元控制连接,配置为控制所述微调关节单元的输出量,用于对所述蛇形自由臂(3)的第二端在x轴方向和z轴方向上的转动量进行控制;所述控制模块与所述蛇形自由臂(3)控制连接,配置为控制所述蛇形自由臂(3)在三维空间内朝向的任意方向移动进行姿态调整。7.根据权利要求6所述的经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,所述微调关节单元包括第一步进电机、第二步进电机,所述第一步进电机输出轴的转动方向水平设置,所述第二步进电机安装于所述第一步进电机的输出轴上,所述第二步进电机的输出轴的转动方向竖直设置。8.根据权利要求3所述的经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,所述建模模块建模具体包括:基于c形臂x线机透视照射获取的透视影像获取皮肤数据和骨骼数据范围;基于获取骨骼数据范围在ct数据库中匹配对应的椎体模型;将皮肤数据获取的椎体模型进行融合建模,获取待穿刺处的立体模型图像。9.根据权利要求8所述的经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,将皮肤数据获取的椎体模型进行融合建模后获取虚拟模型,将该虚拟模型与c形臂x线机透视照射获取的透视影像进行比对,基于图像重合度计算方法计算模型拟合度,在模型拟合度达到要求阈值t1时,将虚拟模型作为待穿刺处的立体模型图像;在模型拟合度大于或等于要求阈值t2且小于要求阈值t1时,微调所述椎体模型中的椎体参数,并重新计算模型拟合度;当模型拟合度小于要求阈值t2时,重新进行c形臂x线机透视照射获取透视影像,基于新的透视影像获取椎体模型并获取虚拟模型,以及进行模型拟合度计算比对,直至模型拟合度达到要求阈值t1。10.根据权利要求2所述的经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,其特征在于,所述模拟穿刺模块模拟具体包括:术者通过所述模拟穿刺模块在立体模型图像中进行穿刺点选取,所述穿刺点包括皮肤外表定位点和椎体定位点;术者通过所述模拟穿刺模块中虚拟的穿刺针对选取的穿刺点进行模拟穿刺,确定穿刺方向和穿刺点定位。
技术总结
本申请公开了经皮椎弓根穿刺针锚定位置及穿刺方向导航系统,涉及医疗器械技术领域,包括机械操作部,机械操作部包括手术床、安装座、蛇形自由臂、固定器、穿刺针,确定穿刺针的初始锚定位置及进针方向后,蛇形自由臂的第一端进行高度调整、蛇形自由臂的第二端移动到位后,固定器固定穿刺针,防止在逐步进针过程中发生锚定位置及穿刺方向改变。基于设置的可视导航部对穿刺针的初始锚定位置及进针方向进行确定,降低穿刺过程中对于术者经验的依赖,提高经皮椎弓根穿刺的效率及准确性。本申请能够防止固定器在逐步进针过程中发生锚定位置及穿刺方向改变,从而很好地固定经皮椎弓根穿刺针,以及提高经皮椎弓根穿刺的效率及准确性。性。性。
技术研发人员:杨阳 戎利民 吴锡华 董健文 刘斌
受保护的技术使用者:中山大学附属第三医院
技术研发日:2022.10.17
技术公布日:2022/12/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。