1.本实用新型涉及曲木设备技术领域,尤其涉及多模具曲木机器人工作站。
背景技术:
2.木材弯曲是将实木在特定工艺下经过弯曲变形成为所需要形状的家具或其他木制品,现有曲木设备采用工人上下料方式工作,工作效率低下、工人劳动强度大,影响木材弯曲效率。
3.为此,提出了多模具曲木机器人工作站,具备节省人工成本以及智能化程度高的优点,进而解决上述背景技术中的问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的多模具曲木机器人工作站。
5.为了实现上述目的,本实用新型采用了如下技术方案:多模具曲木机器人工作站,包括物流线、第一控制箱、液压站、第二控制箱、曲木机a和曲木机b,所述物流线的侧面焊接有多个矩形框架,且多个矩形框架内分别通过链条传动有下料辊筒a、下料辊筒b和上料辊筒,所述下料辊筒b一侧固定有六轴机器人,且六轴机器人一侧固定有曲木机a和曲木机b,所述曲木机a内侧安装有模具a,所述曲木机b的内侧安装有模具b,所述曲木机a一侧设置有液压站,且液压站一侧设置有第一控制箱,并且液压站上设置有油箱,所述液压站的顶面通过安装座固定有油泵电机,且油泵电机一端安装有柱塞泵,所述柱塞泵一侧对应油箱安装有油路块,且油路块的表面由上至下依次安装有电磁阀、保压阀、溢流阀和泄压阀,所述柱塞泵通过管路与油箱连通,所述液压站的侧面安装有控制机构,且控制机构由第二控制箱和操作面板组合而成,所述六轴机器人的第六轴上固定有机器人转接框架,且机器人转接框架的一端通过螺栓固定有机械爪,并且机器人转接框架的另一端通过螺栓固定有吸盘。
6.作为上述技术方案的进一步描述:所述物流线内侧等距安装有多个输送辊筒,且多个输送辊筒之间通过链条和链轮传动。
7.作为上述技术方案的进一步描述:所述上料辊筒的表面活动安置有板材支架,且板材支架上堆叠安置有多个板材。
8.作为上述技术方案的进一步描述:所述曲木机a和曲木机b的顶部通过螺栓固定安装有液压油缸,且液压油缸通过管路与液压站的油箱连通。
9.作为上述技术方案的进一步描述:所述第一控制箱输出端与六轴机器人电性连接。
10.作为上述技术方案的进一步描述:所述液压站的顶面贯通油箱开设有加油口,且加油口内密封安装有油盖,所述液压站的侧壁面对应油箱安装有液位计。
11.本实用新型具有如下有益效果:
12.本实用新型中,通过启动六轴机器人,促使六轴机器人的吸盘吸取上料辊筒表面
堆叠安置的板材,促使板材在六轴机器人的作用下转移至曲木机a和曲木机b的模具之中,实现自动上料,通过启动液压站上的油泵电机,促使柱塞泵将液压油灌注至曲木机a和曲木机b的液压油缸之中,使得液压油缸的活塞杆下压曲木机a的模具a以及曲木机b的模具b,实现板材的弯曲成型,而通过机器人转接框架切换机械爪101和吸盘103的位置,促使六轴机器人的机械爪抓取曲木机a和曲木机b成型后的板材,再转移至下料辊筒a和下料辊筒b上,实现自动下料,相较于传统人工上、下料的方式,能够显著提升曲木成型效率,节省人工成本。
附图说明
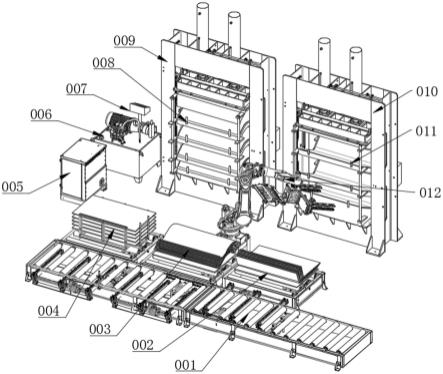
13.图1为本实用新型多模具曲木机器人工作站的结构示意图;
14.图2为本实用新型多模具曲木机器人工作站的六轴机器人结构示意图;
15.图3为本实用新型多模具曲木机器人工作站的液压站结构示意图。
16.图例说明:
17.001、物流线;002、下料辊筒a;003、下料辊筒b;004、上料辊筒;005、第一控制箱;006、液压站;007、控制机构;008、模具a;009、曲木机a;010、曲木机b;011、模具b;012、六轴机器人;101、机械爪;102、机器人转接框架;103、吸盘;104、第六轴;201、第二控制箱;202、操作面板;203、柱塞泵;204、油泵电机;205、电磁阀;206、保压阀;207、溢流阀;208、油路块;209、泄压阀;210、加油口;211、液位计;212、油箱。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.根据本实用新型的实施例,提供了多模具曲木机器人工作站。
20.现结合附图和具体实施方式对本实用新型进一步说明,如图1-3所示,根据本实用新型实施例的多模具曲木机器人工作站,包括物流线001、第一控制箱005、液压站006、第二控制箱201、曲木机a009和曲木机b010,物流线001的侧面焊接有多个矩形框架,且多个矩形框架内分别通过链条传动有下料辊筒a002、下料辊筒b003和上料辊筒004,下料辊筒b003一侧固定有六轴机器人012,且六轴机器人012一侧固定有曲木机a009和曲木机b010,曲木机a009内侧安装有模具a008,曲木机b010的内侧安装有模具b011,曲木机a009一侧设置有液压站006,且液压站006一侧设置有第一控制箱005,并且液压站006上设置有油箱212,液压站006的顶面通过安装座固定有油泵电机204,且油泵电机204一端安装有柱塞泵203,柱塞泵203一侧对应油箱212安装有油路块208,且油路块208的表面由上至下依次安装有电磁阀205、保压阀206、溢流阀207和泄压阀209,柱塞泵203通过管路与油箱212连通,液压站006的侧面安装有控制机构007,且控制机构007由第二控制箱201和操作面板202组合而成,六轴机器人012的第六轴104上固定有机器人转接框架102,且机器人转接框架102的一端通过螺栓固定有机械爪101,并且机器人转接框架102的另一端通过螺栓固定有吸盘103;
21.在一个实施例中,物流线001内侧等距安装有多个输送辊筒,且多个输送辊筒之间
通过链条和链轮传动,通过物流线001内侧的多个输送辊筒,有利于板材的传送。
22.在一个实施例中,上料辊筒004的表面活动安置有板材支架,且板材支架上堆叠安置有多个板材,通过板材支架便于板材的堆叠安放,有利于六轴机器人012的抓取上料。
23.在一个实施例中,曲木机a009和曲木机b010的顶部通过螺栓固定安装有液压油缸,且液压油缸通过管路与液压站006的油箱212连通,通过液压油缸便于对曲木机a009和曲木机b010内的模具a和模具b施加压力,有利于板材的弯曲成型,其中模具a和模具b的构造可根据实际木材弯曲需求进行适应性调整,本实用新型中的模具a和模具b内部轮廓分别为波浪型和v型。
24.在一个实施例中,第一控制箱005输出端与六轴机器人012电性连接,通过第一控制箱005便于控制六轴机器人012的机械爪101以及吸盘103位置的切换以及转移。
25.在一个实施例中,液压站006的顶面贯通油箱212开设有加油口210,且加油口210内密封安装有油盖,液压站006的侧壁面对应油箱212安装有液位计211,通过加油口210便于添加液压油,通过液位计211便于获悉液位高度,其中,操作面板202的输出端分别与油泵电机和液压油缸电性连接,具体为常规技术,不做过多赘述。
26.工作原理:
27.使用时,将物流线001、第一控制箱005、液压站006、第二控制箱201、曲木机a009和曲木机b010置于合适的位置,通过启动六轴机器人012,促使六轴机器人012的吸盘103吸取上料辊筒004表面堆叠安置的板材,促使板材在六轴机器人012的作用下转移至曲木机a009和曲木机b010的模具之中,实现自动上料,通过启动液压站006上的油泵电机204,促使柱塞泵203将液压油灌注至曲木机a009和曲木机b010的液压油缸之中,使得液压油缸的活塞杆下压曲木机a009的模具a008以及曲木机b010的模具b011,实现板材的弯曲成型,而通过机器人转接框架102切换机械爪101和吸盘103的位置,促使六轴机器人012的机械爪101抓取曲木机a009和曲木机b010成型后的板材,再转移至下料辊筒a002和下料辊筒b003上,实现自动下料。
28.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。