1.本发明属于监测测量技术领域,尤其属于倾斜度监测技术领域,涉及一种桥梁工程变截面高墩液压爬模施工领域,具体涉及一种变截面超高墩液压爬模模板倾斜度测量方法。
背景技术:
2.变截面高墩桥梁在桥梁施工领域的应用十分广泛,其中高墩的变截面施工质量关系到高墩线形与上部结构的受力与线形。通常采用液压爬模施工方法建设变截面高墩,模板的倾斜度控制是变截面液压爬模施工控制最重要的控制指标之一。
3.现对于模板倾斜度测量的主要手段是全站仪,测量手段单一,没有对比数据,而且使用全站仪进行测控时常存在距离测控点较远、来回不便的问题。
4.专利申请cn214893258u一种工民建建筑工程专用倾斜度测量装置公开了一种测量装置,该装置依据重力原理,将台座下表面平稳接触测量面,在重力作用下指针会指出测角环上角度。专利申请cn103278074b公开了一种倾斜度测量仪,该测量仪通过定位孔确定大范围角度,然后通过测量板与百分表测量精确角度。专利申请cn113418505a公开了一种桥梁墩柱全测面倾斜度测量装置及测量方法,该方法利用倾斜度指向装置和半球刻度板确定待测面倾斜度。专利申请cn109668543a公开了一种基于激光雷达的倾斜度测量方法,该方法利用激光雷达获取角度坐标信息从而计算待测面倾角。
5.但是,由于变截面超高墩高度较大,收坡角度较小,对测量精度要求高,且施工现场情况复杂,以上测量技术在变截面高墩模板倾斜度测量中使用较为困难,存在诸多不足。
技术实现要素:
6.本发明根据现有技术的不足公开了一种模板倾斜度测量方法。本发明目的是针对现有混凝土浇筑模板测量装置受施工条件限制导致的测量手段单一、测控不精准的问题,特别是变截面高墩液压爬模模板倾斜度测量的需要,提供一种适用、方便、监测即时的模板倾斜度测量方法。
7.本发明所采用的技术方案如下:
8.一种模板倾斜度测量方法,由以下测量装置及其测量步骤实现:
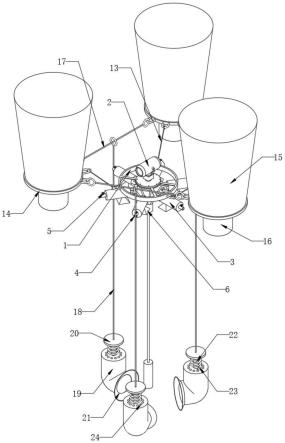
9.测量装置包括:用于获取测量距离的激光测距仪和与激光测距仪组合进行收集、整理、显示数据的控制器,激光测距仪固定设置于支架上;支架包括一平台,平台中心并列竖直设置两竖杆,两竖杆可绕一共同的轴向中心转动,两竖杆上均分别设置可沿竖杆上下移动的激光测距仪,两激光测距仪的测量原点位于两竖杆的轴向中心;两竖杆顶端均分别连接与竖杆垂直的水平横杆,各横杆均分别设置可沿横杆水平移动的悬吊架,各悬吊架悬挂自然垂吊可上下收放的竖直信标;
10.测量包括以下步骤:
11.1)将支架放置在距待测模板一定距离的稳固的操作台上正对待测模板平面,调节
平台水平;
12.2)根据现场情况,调节两根竖杆使两根竖杆张开合适角度以便进行激光测量,将悬吊架调节至横杆前部固定,释放竖直信标并固定;
13.3)将激光测距仪调节至竖杆上部位置,分别测量两横杆上激光测距仪至模板的距离并储存;测量第一横杆上的激光测距仪至竖直信标的距离并储存;
14.4)将激光测距仪调节至竖杆下部位置,期间悬吊架和竖直信标不变,测量第一横杆上激光测距仪至竖直信标的距离并储存;分别测量两横杆上激光测距仪至模板的距离并储存;
15.5)数据处理,完成测量。
16.数据处理包括以下方法;
17.s1:以竖杆轴向中心位置为原点,垂直于模板水平边方向为x轴、平行于模板水平边方向为y轴、竖杆方向为z轴建立空间直角坐标系;
18.s2:过竖直信标所在的直线做平行于模板水平线的竖直平面,辅助竖直平面与模板平面的夹角即为待求倾斜度夹角;
19.s3:利用余弦定理与三角函数求解计算控制点的局部坐标;
20.s4:根据控制点局部坐标求竖直平面和模板平面的法向量;
21.s5:求解模板平面与竖直平面的夹角,完成测量。
22.本发明支架采用三脚支架,由支撑腿与平台构成;支撑腿上设有用于调平的调节螺栓,平台表面设有调平气泡和用于两竖杆转动的旋转轨道。
23.进一步所述旋转轨道上设置有用于定位固定竖杆转动的固定螺钉,并设置用于获得两激光测距仪测量夹角的角度刻度。
24.进一步所述竖杆外壳横截面为开口矩形,激光测距仪设置于矩形外壳内,两竖杆通过位于轴向中心的旋转轴固定在一起,旋转轴固定于平台上,两竖杆可沿旋转轨道、绕旋转轴转动张开实现两激光测距仪测量成一夹角固定。
25.进一步所述横杆外壳横截面为开口矩形,悬吊架通过矩形横杆内横轨移动。
26.本发明测量装置横杆顶部设有弧形导轨,横杆可随竖杆的旋转而旋转,两横杆与弧形导轨形成三脚体系,增加了两横杆的稳定性。
27.本发明有益性,本发明采用可调节支架进行支撑,设有两套悬吊架及竖直信标,采用激光测距仪进行测距,并且激光测距仪与竖直信标的高度可调,可在复杂情况的放置平台上近距离对表面附有各种装置的平面进行倾斜度测量,降低了装置对测量环境的要求;采用两激光测距仪同时测距,结合数学方法求解待测平面的倾斜度,减小了由于仪器不正对待测平面引起的误差。
附图说明
28.图1是本发明测量装置三维示意图;
29.图2是本发明测量装置三脚支架立面图;
30.图3是本发明测量装置三脚支架俯视图;
31.图4是本发明测量装置三脚支架仰视图;
32.图5是本发明测量装置竖杆立面图;
33.图6是本发明测量装置横杆俯视图;
34.图7是本发明测量装置横杆横截面图;
35.图8是本发明测量装置竖杆横截面图;
36.图9是本发明测量装置电缆联接示意图;
37.图10是本发明测量方法计算模型示意图;
38.图11是本发明测量方法计算模型s点平面示意图;
39.图12是本发明测量方法计算模型o点平面示意图。
40.图中,1是支架,12是支撑腿,13是调节螺栓,14是平台,15是调平气泡,16是旋转轨道,17是固定螺钉;2是竖杆,21是竖杆外壳,22是电动竖轨,23是旋转轴,24是第一竖杆,25是第二竖杆;3是横杆,31是横杆外壳,32是电动横轨,33是悬吊架,34是竖直信标,35是弧形导轨,36是第一横杆,37是第二横杆;4是激光测距仪,5是控制器。
具体实施方式
41.下面结合具体实施方式对本发明进一步说明,具体实施方式是对本发明原理的进一步说明,不以任何方式限制本发明,与本发明相同或类似技术均没有超出本发明保护的范围。
42.如图所示,本发明变截面高墩液压爬模模板倾斜度测量装置,包括三脚支架、竖杆、横杆、激光测距仪、控制器;三脚支架包括架体支撑和支架平台,架体支撑上设有调节螺旋;竖杆下端垂直固定于三脚支架顶面上,包括第一竖杆与第二竖杆,两竖杆相同,内设电动轨道,激光测距仪安装在电动轨道上,可上下移动并射出与对应竖杆垂直、对应横杆平行的激光进行测距,两激光测距仪在沿竖杆方向位置相同;横杆垂直固定在竖杆上端,包括第一横杆与第二横杆,两横杆完全相同,内部设有电动轨道、悬吊装置、竖直装置,悬吊装置固定在电动轨道上,竖直装置与悬吊装置连接;集中控制器连接并可电动控制激光测距仪、电动轨道、悬吊装置;
43.如图1所示,三脚支架包括金属制架体支撑与支架平台,架体支撑上设有调节螺旋,支架平台上设有调平气泡、旋转轨道和竖杆,通过调节架体支撑上的调节螺旋对三脚支架进行调平操作,旋转轨道外围设有角度刻度,底面设有固定螺旋;
44.竖杆外壳横截面为开口矩形,两竖杆通过旋转轴固定在一起,旋转轴固定于支架平台上,两竖杆可沿旋转轨道、绕旋转轴转动从而张开一定角度,并利用固定螺旋拧紧固定;
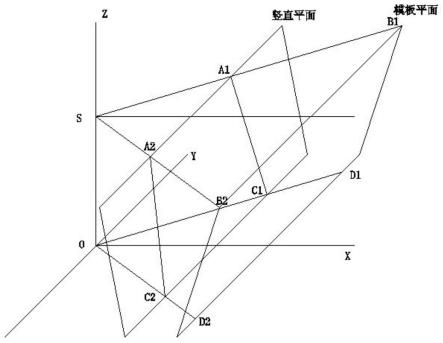
45.横杆外壳横截面为向下开口的矩形,悬吊装置固定在横杆内部电动轨道上可沿电动轨道移动,悬吊装置可沿电动导轨移动,横杆顶部设有旋转导轨,横杆可随竖杆的旋转而旋转,弧形导轨的设置可增加其旋转时的稳定性;
46.竖直装置与悬吊装置连接,可通过控制悬吊装置转动控制竖直装置在竖直方向上的长度,竖直装置由金属条带和吊锤组成,金属条带具有软、薄、窄的特点;
47.集中控制器为总控制设备,设有显示屏和按键,可控制激光测距仪沿电动导轨上下移动、测距并记录其移动的距离,可控制悬吊装置沿横杆内电动导轨移动并通过控制悬吊装置调整竖直装置的长度;
48.一种变截面高墩液压爬模模板倾斜度测量装置,具体操作方法为:将三脚支架放
置在待测模板不远处,调节架体支撑上的三脚螺旋使架体平台近似水平,手动控制两竖杆张开一定角度并拧紧以便测量,将两横杆上的悬吊装置调节至合适位置并将竖直装置收起;将两激光测距仪调节至竖杆上部,测量两者至模板的距离,调节第一横杆的竖直装置的长度,测量第一竖杆内激光测距仪至竖直装置的距离;将两激光测距仪调节至竖杆下部,测量第一竖杆内激光测距仪至竖直装置的距离,将竖直装置收起,测量两激光测距仪至模板的距离;
49.如图10、图11、图12所示,假设一种变截面高墩液压爬模模板倾斜度测量装置测量数据为:
50.sa1=a
1 sb1=b
1 sb2=b251.oc1=c
1 od1=d
1 od2=d252.os=h ∠a1sa2=∠c1oc2=α
53.其中,sa1是第一竖杆激光测距仪上部测点与竖直平面的测量距离,sb1是第一竖杆激光测距仪上部测点与模板平面的测量距离,sb2是第二竖杆激光测距仪上部测点与模板平面的测量距离,oc1是第一竖杆激光测距仪下部测点与竖直平面的测量距离,od1是第一竖杆激光测距仪下部测点与模板平面的测量距离,od2是第二竖杆激光测距仪下部测点与模板平面的测量距离,os是上下两测点之间的距离,∠a1sa2是上部测点两横杆的夹角,∠c1oc2是下部测点两横杆的夹角。
54.s1,建立空间直角坐标系,以激光测距仪第二测点为原点,竖杆方向为z轴,垂直于模板平面内水平线为x轴,平行于模板平面内为y轴,建立空间直角坐标系;
55.s2,过第一横杆的竖直装置所在直线做平行于模板平面内水平线的辅助平面a1a2c2c1;
56.s3,利用正、余弦定理求解控制点局部坐标,计算方法如下:
[0057][0058][0059]ya2
=-a2cos∠sa2a
1 x
a2
=a2sin∠sa2a
1 z
a2
=h
[0060]
同理可求a1、c1、b1、b2、d1局部坐标;
[0061]
s4,求解两平面的法向量,计算流程如下:
[0062]
设竖直平面a1a2c2c1的法向量为:
[0063][0064]
则:
[0065][0066]
即:
[0067][0068]
设模板平面b1b2d2d1的法向量为:
[0069][0070]
则:
[0071][0072]
即:
[0073][0074]
s5,所以竖直平面与模板平面的夹角为:
[0075][0076]
测量完成。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。