1.本发明涉及一种大坝外观变形监测及预警方法,具体地说,涉及一种监测混凝土坝、土石坝的坝体外观全域变形监测的方法。本发明属于大坝运行安全监测技术领域。
背景技术:
2.混凝土坝、土石坝等挡水建筑物在运行期受水压力、温度等外荷载作用,同时考虑长期运行筑坝材料特性参数演化,坝体结构会产生不同程度的变形,当变形超过设计、计算分析指标或现行规范的要求,即存在安全隐患,需要采取一定的工程措施予以控制变形发展,从而保障大坝运行安全。
3.目前工程实践中应用较广泛的大坝内外观变形监测方法有引张线法、视准线法、正(倒)垂线法、测斜管观测法、真空激光观测法等,近年来随着自动化水平提升,测量机器人、柔性测斜仪等一批测量精度高、易于安装和自动化观测的技术得到了快速发展和应用。上述变形观测方法的优点是精度较高、易于自动化采集数据,其不足之处在于仅能获得坝体局部,即某监测断面上的点、或线反映出的大坝变形,无法观测到大坝全域,即大坝面、体的连续变形。而作为挡水建筑物的土石坝或混凝土坝,空间跨度通常在上百米至上千米,现有观测手段无法覆盖监测断面之间的盲区,而既有工程隐患、险情及事故案例表明,监测盲区内发生异常变形的概率极大,若未能及时发现异常变形并采取工程控制与修补措施,将会造成严重的事故。综上,对大坝全域实现变形安全监测,对保障大坝长期运行安全具有重要意义。
技术实现要素:
4.鉴于上述原因,本发明的目的是提供一种用于监测及预警大坝坝体外观全域变形的方法。
5.为实现上述目的,本发明采用以下技术方案:一种大坝外观全域变形监测及预警方法,它包括如下步骤:
6.s1、获取大坝坝体整个外观三维点云坐标集;
7.s1.1、采用无人机视觉摄影并搭载激光雷达装备等方式,获取大坝坝体全域的坝面图像及激光坐标等数据,采用相邻图像特征点匹配并通过激光雷达校核的方法,对拍摄的全域坝面表面图像进行图像处理,获取t时刻大坝全域坝面三维点云坐标数据集a
t
={x
ti
,y
ti
,z
ti
},其中,i=1,2,3,
…
,p,p为代表大坝坝体全域外观特征的三维点云数据的个数;
8.s1.2、依据大坝坝面的空间位置,将大坝坝面均匀划分为m个坝面拟合区域,则大坝整个坝面三维点云坐标数据集b
t
被划分为{b
t1
,b
t2
,b
t3
,
…
,b
tm
},其中,b
tm
表示t时刻编号为m的坝面拟合区域三维点云坐标数据集合;
9.s2、对t时刻大坝整个坝面三维点云坐标集b
t
进行多元回归统计分析,确定大坝整个坝面多元连续函数集c
t
={f
t1
(x,y,z),f
t2
(x,y,z),f
t3
(x,y,z),
…
,f
tm
(x,y,z)},多元连
续函数集c
t
的计算步骤如下:
10.s2.1、基于大坝整个坝面三维点云坐标数据集b
tm
,分别求解每个坝面拟合区域的多元连续函数f
tm
(x,y,z)及每个坝面拟合区域的决定系数r2:
11.1)设坝面多元连续函数f
tm
(x,y,z)模型为:其中,a
jk
为函数系数,j为x的项数,k为y的项数;
12.2)采用残差平方和s(x,y,z)作为评价函数,带入坐标集b
tm
,同时设置限制函数:求解的最优系数解集{a
00
,a
01
,a
02
,a
03
,a
10
,...,a
jk
},得到了当前t时刻大坝每个坝面拟合区域的多元连续函数f
tm
(x,y,z);
13.3)计算大坝每个坝面拟合区域多元连续函数f
tm
(x,y,z)的决定系数其中,ssr为回归平方和,sst为总平方和;
14.s2.2、判断每个坝面拟合区域的决定系数r2是否大于0.9?
15.如果决定系数r2>0.9,说明该坝面拟合区域连续函数f
tm
(x,y,z)满足精度要求,执行步骤s2.4;
16.如果决定系数r2≤0.9,说明该坝面拟合区域连续函数f
tm
(x,y,z)不满足精度要求,执行步骤s2.3;
17.s2.3、对不满足精度要求的连续函数f
tm
(x,y,z)所在坝面拟合区域坐标集b
tm
,基于几何构造对该坝面拟合区域进行四等分,则此时b
tm
由四个子区域构成{b
t(m1)
,b
t(m2)
,b
t(m3)
,b
t(m4)
},对重新划分后的坐标集区域执行步骤s2.1拟合求解,若重新拟合后的多元连续函数的决定系数r2仍然不大于0.9,则继续对划分后仍不满足精度要求的坝面拟合区域坐标集继续四等分细化,直到大坝坝面内的所有坝面拟合区域的多元连续函数的决定系数r2都大于0.9,则停止划分;
18.此时第m号坝面拟合区域b
tm
有b(b≥1)个子区域{b
t(m1)
,b
t(m2)
,b
t(m3)
,
…
,b
t(mb)
},每个子区域都有一个高精度的多元连续函数f
tmb
(x,y,z);
19.s2.4当m个区域内的所有子区域决定系数r2全部大于0.9时,t时刻的大坝表面一共有n个多元连续函数;
20.s3、对t 1时刻大坝整个坝面三维点云坐标数据集b
(t 1)m
重复上述步骤s1和s2操作,确定t 1时刻大坝整个坝面多元连续函数集c
t 1
={f
(t 1)1
(x,y,z),f
(t 1)2
(x,y,z),f
(t 1)3
(x,y,z),
…
,f
(t 1)m
(x,y,z)},t 1时刻的大坝表面一共有l个多元连续函数;
21.s4、对比t时刻整个坝面多元连续函数集c
t
和t 1时刻整个坝面多元连续函数集c
t 1
,判断大坝坝面是否存在变形情况,并依据变化情况划分预警等级,具体方法如下:
22.(1)当t时刻大坝整个坝面多元连续函数集c
t
和t 1时刻大坝整个坝面多元连续函数集c
t 1
的函数个数相等,即n=l,且同区域的函数模型并未发生变化,说明大坝表面未发生变形,无需预警;
23.(2)当t时刻大坝整个坝面多元连续函数集c
t
和t 1时刻大坝整个坝面多元连续函
数集c
t 1
的函数个数相等,即n=l,但同区域的函数模型发生变化,依据大坝坝面区域编号对变化区域提出一级预警;
24.(3)当t时刻大坝整个坝面多元连续函数集c
t
和t 1时刻大坝整个坝面多元连续函数集c
t 1
的函数个数不相等,即n≠l,且(l-n)/4≤2时,说明大坝坝面局部发生变形,依据大坝坝面区域编号对变化区域提出二级预警;
25.(4)当t时刻大坝整个坝面多元连续函数集c
t
和t 1时刻大坝整个坝面多元连续函数集c
t 1
的函数个数不相等,即n≠l,且2《(l-n)/4≤5时,说明大坝坝面多处发生变形,依据大坝坝面区域编号对变化区域提出三级预警;
26.(5)当t时刻大坝整个坝面多元连续函数集c
t
和t 1时刻大坝整个坝面多元连续函数集c
t 1
的函数个数不相等,即n≠l,且5《(l-n)/4时,说明大坝坝面出现严重变形,依据大坝坝面区域编号对变化区域提出四级预警。
附图说明
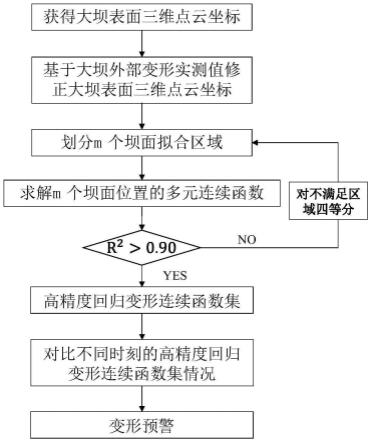
27.图1为本发明大坝外观全域变形监测及预警方法流程图。
具体实施方式
28.下面结合附图和实施例对本发明的结构及特征进行详细说明。需要说明的是,可以对此处公开的实施例做出各种修改,因此,说明书中公开的实施例不应视为对本发明的限制,而仅是作为实施例的范例,其目的是使本发明的特征显而易见。
29.如图1所示,本发明通过以下方法实现大坝坝体外观全域变形监测及预警,具体方法如下:
30.s1、获取大坝坝体整个外观三维点云坐标集。
31.s1.1、采用无人机视觉摄影并搭载激光雷达装备等方式,获取大坝坝体全域的坝面图像及激光坐标等数据,采用相邻图像特征点匹配并通过激光雷达校核的方法,对拍摄的全域坝面表面图像进行图像处理,获取t时刻大坝全域坝面三维点云坐标数据集a
t
={xi,yi,zi},其中,i=1,2,3,
…
,p,p为代表大坝坝体全域外观特征的三维点云数据的个数;
32.为获得更准确的整个坝面三维点云坐标集,本发明用通过传统测量方法例如引垂线法或视准线法或全站仪获得的局部和/或某一大坝断面的数据修正步骤s1.1获得的大坝坝体整个外观三维点云坐标数据集,形成更为准确的大坝整个坝面三维点云坐标数据集bt={xi,yi,zi},其中,i=1,2,3,
…
,p。
33.例如,在获得大坝坝体外观全域三维点云坐标数据集a
t
与a
t-1
后,将两个不同时刻三维点云坐标数据集a
t-1
与a
t
中,与大坝已有的传统外部变形观测点位对应的坐标位置进行标记,分别记录为a
i0t-1
={x
i0t-1
,y
i0t-1
,z
i0t-1
}与a
i0t
={x
i0t
,y
i0t
,z
i0t
},其中,a
0t-1
是大坝已有的传统外部变形观测点位在t-1时刻的三维点云坐标,a
0t
是大坝已有的传统外部变形观测点位在t时刻的三维点云坐标,δa
i0
={x
i0t-x
i0t-1
,y
i0t-y
i0t-1
,z
i0t-z
i0t-1
}是计算得到的t-1时刻到t时刻标记点位的空间三维坐标变化值,即t-1时刻到t时刻通过三维点云坐标计算得到的大坝已有外部变形观测点位的变形数值。此时,通过传统观测技术测量的大坝已有外部变形观测点位从t-1时刻和t时刻的变形数据为δb
it
={δx
it
,δy
it
,δz
it
}(当无任何测量误差时,两者理论上完全相等),工程实践中,一般以传统变形观测技术获取的变形
数值为准,采用传统观测变形数据集δb
t
的实测结果对三维点云坐标数据集a
t
进行修正,修正方法为,当大坝已有外部变形监测点位与三维点云坐标重合时,采用t-1时刻的三维点云坐标与δb
it
相加,得到t时刻修正后的三维点云坐标b
it
,其他a
t
中的三维坐标采用内部插值法进行修正。综上,获得修正后的大坝整个坝面三维点云坐标数据集b
t
={x
ti
,y
ti
,z
ti
},其中,i=1,2,3,
…
,p。
34.s1.2、为能够快速地定位坝面变形区域位置,本发明依据大坝坝面的空间位置,将大坝坝面均匀划分为m个坝面拟合区域,则修正后的整个大坝坝面三维点云坐标数据集b
t
被划分为{b
t1
,b
t2
,b
t3
,
…
,b
tm
},其中,b
tm
表示t时刻编号为m的坝面拟合区域三维点云坐标数据集合。
35.在本发明较佳实施例中,划分的每个坝面拟合区域面积不超过1m2。
36.s2、对t时刻大坝整个坝面三维点云坐标集b
t
进行多元回归统计分析,确定整个坝面多元连续函数集c
t
={f
t1
(x,y,z),f
t2
(x,y,z),f
t3
(x,y,z),
…
,f
tm
(x,y,z)},多元连续函数集c
t
的计算步骤如下:
37.s2.1基于大坝整个坝面三维点云坐标数据集b
tm
,分别求解每个坝面拟合区域的多元连续函数f
tm
(x,y,z)及每个坝面拟合区域的决定系数r2:
38.1)本发明设坝面多元连续函数f
tm
(x,y,z)模型为:其中,a
jk
为函数系数,j为x的项数,k为y的项数;
39.2)采用残差平方和s(x,y,z)作为评价函数,带入坐标集b
tm
,同时设置限制函数:求解的最优系数解集{a
00
,a
01
,a
02
,a
03
,a
10
,...,a
jk
},得到了当前t时刻大坝每个坝面拟合区域的多元连续函数f
tm
(x,y,z);
40.3)计算大坝每个坝面拟合区域多元连续函数f
tm
(x,y,z)的决定系数其中,ssr为回归平方和,sst为总平方和;
41.s2.2、判断每个坝面拟合区域的决定系数r2是否大于0.9?
42.如果决定系数r2>0.9,说明该坝面拟合区域连续函数f
tm
(x,y,z)满足精度要求,执行步骤s2.4;
43.如果决定系数r2≤0.9,说明该坝面拟合区域连续函数f
tm
(x,y,z)不满足精度要求,执行步骤s2.3;
44.s2.3、对不满足精度要求的连续函数f
tm
(x,y,z)所在坝面拟合区域坐标集b
tm
,基于几何构造对该坝面拟合区域进行四等分,则此时b
tm
由四个子区域构成{b
t(m1)
,b
t(m2)
,b
t(m3)
,b
t(m4)
},对重新划分后的坐标集区域进行步骤s2.1拟合求解过程,若重新拟合后的多元连续函数的决定系数r2仍然不大于0.9,则继续对划分后仍不满足的坐标集继续四等分细化,直到大坝坝面内的所有区域的多元连续函数的决定系数r2都大于0.9,则停止划分;
45.此时第m号坝面拟合区域b
tm
有b(b≥1)个子区域{b
t(m1)
,b
t(m2)
,b
t(m3)
,
…
,b
t(mb)
},每个区域都有一个高精度的多元连续函数f
tmb
(x,y,z);
46.s2.4当m个区域内的所有子区域决定系数r2全部大于0.9时,t时刻的大坝表面一共有n个多元连续函数。
47.s3、对t 1时刻大坝整个坝面三维点云坐标数据集b
(t 1)m
重复上述步骤s1和s2操作,确定t 1时刻大坝整个坝面多元连续函数集c
t 1
={f
(t 1)1
(x,y,z),f
(t 1)2
(x,y,z),f
(t 1)3
(x,y,z),
…
,f
(t 1)m
(x,y,z)},t 1时刻的大坝表面一共有l个多元连续函数。
48.s4、对比t时刻大坝整个坝面多元连续函数集c
t
和t 1时刻大坝整个坝面多元连续函数集c
t 1
,对大坝的变形情况进行快速判别,并依据变化情况划分预警等级,具体情况如下:
49.(1)当函数集c
t
和c
t 1
的函数个数并未发生变化,即n=l,且同区域的函数模型并未发生变化,说明大坝坝面并未发生变形,无需预警;
50.(2)当函数集c
t
和c
t 1
的函数个数并未发生变化,即n=l,但是同区域的函数模型发生变化,说明大坝坝面发生微小变形,依据大坝坝面区域编号对变化区域提出一级预警;
51.(3)当函数集c
t
和c
t 1
的函数个数发生变化,n≠l,且(l-n)/4≤2时,说明土石坝坝面局部出现管涌、渗漏等变形现象;混凝土坝面局部出现开裂、膨胀、剥落等变形现象,依据大坝坝面区域编号对变化区域提出二级预警;
52.(4)当函数集c
t
和c
t 1
的函数个数发生变化,n≠l,且2《(l-n)/4≤5时,说明土石坝坝面多处出现管涌、渗漏等变形现象;混凝土坝面局部多处出现开裂、膨胀、剥落等变形现象,依据大坝坝面区域编号对变化区域提出三级预警;
53.(5)当函数集c
t
和c
t 1
的函数个数发生变化,n≠l,且5《(l-n)/4时,说明大坝坝面严重变形,依据大坝坝面区域编号对变化区域提出四级预警。
54.当监测到大坝坝面为一级预警状况时,管理人员需要增加巡检频率;当监测到大坝坝面为二级以上预警时,需要降低运行水位,并对大坝采取加固修复等措施。
55.本发明基于区域划分及回归变形连续函数比较方法,可以快速实现变形区域及变形状态的识别。由于本发明通过精细划分大坝表面区域和判定系数r2的高精度要求,能在坝面局部发生微小变形时,快速识别并定位变形区域并发出预警,提示采取合理工程技术措施,有效控制大坝外观变形的进一步扩大,保障大坝安全。
56.最后应说明的是:以上所述的各实施例仅用于说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或全部技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。