1.本发明涉及深海潜器辅助装备技术领域,尤其是一种深海坐底支杆自动扶正装置及操作方法。
背景技术:
2.在深海探索中,深海潜器无动力下潜到深海海底,并采用单支杆插入沙质海底。在海流扰动、下潜过程中的水动力非定常力等作用下,支杆无法竖直插入海底,往往存有一定的倾斜角度。支杆偏斜会给设备使用带来不利影响,需要采用其他措施加以消除。此外,为了增加坐底的稳定性,抵抗海流扰动,插入海底的深度需要尽可能的大。在潜器长期驻留海底的过程中,极易遭遇海底暗流的影响,很可能会导致插入海底的深度减小,降低设备坐底的稳定性。因此,需要再次扶正和维持插入深度,即需要自动抗扰动功能。为了应对深海高压,潜器耐压罐往往需要体积更小、厚度更大,耐压罐难以提供足够的正浮力。因而,潜器通常会在水下具有负浮力。而潜器负浮力过大会导致潜器下潜速度过快,对潜器坐底安全性带来不利影响。因此,迫切需要提供一种降低下潜速度的方法。
3.为了解决以上问题,现有的技术方案具有以下不足:
4.提高下潜速度可以增加触底的冲击力,提高插入深度。但是,会增加坐底安全风险。降低下潜速度,可以采用增加浮力块减小负浮力的方式。但是,深海浮力块造价昂贵,大幅提高了建造成本。在触底后,如果采用机械结构辅助扶正,会存深海耐压、长期驻守的腐蚀性以及可靠性问题。该方案需要采用深海电机,要解决超高压环境下的耐压问题,因此,造价昂贵、可靠性不足。如果采用齿轮齿条结构,在坐底时,扬起的海底泥沙会加入到齿轮缝隙中,存在泥沙卡滞的可能。坐底插入的深潜不一,如果插入深度过大,油缸推动支杆扶正需要非常大的推力,机械结构重量较大,减弱潜器的负载能力。如果采用高频振动推杆来缓慢扶正的方式,要求电机或者液压源频繁启动,会产生噪音,降低设备的隐蔽性。长期待机自动抗扰动需要配备更多的传感器、机械设备,系统复杂、可靠程度差。
5.因此,迫切需求一种既能解决以上问题,又能实现适应性广、结构简单、安全可靠的新装置及方法。
技术实现要素:
6.本技术人针对上述现有生产技术中的缺点,提供一种深海坐底支杆自动扶正装置及操作方法,从而可以有效的解决现有技术中种种问题,大大提高工作可靠性,全自动操作方便,噪声低。
7.本发明所采用的技术方案如下:
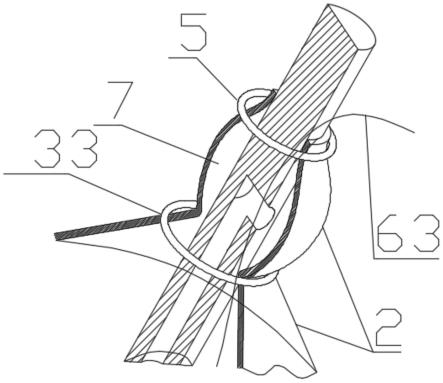
8.一种深海坐底支杆自动扶正装置,包括海底面,所述海底面上插入有坐底支杆,所述坐底支杆的外部套有介电体薄膜,所述介电体薄膜的上部和下部分别通过一号橡胶紧固环和二号橡胶紧固环进行垂向位置的约束和密封,位于一号橡胶紧固环和二号橡胶紧固环之间的介电体薄膜内部形成薄膜腔体;还包括圆环支撑杆组件,所述圆环支撑杆组件的上
方设置有圆环杆,所述圆环杆的圆周方向均匀间隔插入有四根支撑杆,所述支撑杆的上部与圆环杆焊接,支撑杆的下部插入至二号橡胶紧固环中;坐底支杆的底部设置有触底开关,所述触底开关上方通过电导线连接潜器本体。
9.其进一步技术方案在于:
10.所述坐底支杆的主体呈圆柱状结构,所述坐底支杆的内部垂直方向设置有流道,位于流道上方设置有与坐底支杆侧壁连通的上流水孔,位于坐底支杆的底部设置有下流水孔,所述下流水孔处设置有水溶性固体堵头。
11.所述上流水孔位于薄膜腔体的内部,并靠近上方。
12.在下潜之前,薄膜腔体和支杆流道内充有轻油。
13.所述介电体薄膜展开后呈圆环状结构,。
14.介电体薄膜由五层材料组成,中间为介电体材料,介电体材料的上下端分别为一号柔性电极和二号柔性电极,所述一号柔性电极的外层为一号保护膜,二号柔性电极的外层为二号保护膜。
15.所述圆环杆的外径大于二号橡胶紧固环的外径。
16.触底开关的结构为:包括上下间隔固定在坐底支杆上的一号导向环和二号导向环,一号导向环和二号导向环之间焊接有一号弹簧,二号导向环的右端粘贴有一号磁铁,所述一号导向环的端部焊接有控制箱壳体,所述控制箱壳体内充有绝缘气体或者液体,控制箱壳体内底部设置有导电片,二号磁铁通过胶水粘贴于下的导电片上,一号磁铁和二号磁铁的极性相反,二号磁铁与控制箱壳体内顶面之间设置有二号弹簧,控制箱壳体的外侧安装有速度传感器,所述控制箱壳体内安装有控制器,控制箱壳体上安装水密接插件。
17.所述二号导向环沿着坐底支杆上下滑动,所述导电片和箱体壳体均为可导电不带磁性的金属材料。
18.一种深海坐底支杆自动扶正装置的操作方法,。
19.作为上述技术方案的进一步改进:
20.设定坐底支杆的插入深度:对控制箱壳体在坐底支杆上的高度进行调整,设定坐底支杆插入海底的目标深度;
21.然后,控制参数设定:通过遥控设备与控制器进行通讯,对控制器中自动控制程序中的参数进行设定,主要为以下三个:
22.1、自由下潜过程中的最大下潜速度vm;
23.2、坐底后再次开启驱动电压的等待时间tw,通常设定为10分钟;
24.3、扶正或打桩辅助支杆插入过程中,单次开启驱动电压的稳定时长ts,间隔也是ts,通常设定为5分钟;
25.其次,设备充油:
26.在下水前将本装置倒立,通过流水孔倒入轻油,直至充满薄膜腔体和支杆流道;
27.将水溶性固体堵头104塞入流水孔103,封堵出口,防止下水前轻油泄露。
28.在负浮力的作用下无动力下潜;
29.下潜过程中触底开关为开通状态;
30.下水后,水溶性固体堵头会快速溶解,流水孔敞开,轻油与海水连通,压力平衡;在下潜过程中,底座支杆基本处于竖直状态;轻油密度小于水,在正浮力的作用下始终处于流
道和薄膜腔体内,因此,在下潜过程中,轻油给潜器持续提供正浮力,轻油处于潜器上方,提高潜器的浮心,增加稳性高,有利于维持底座支杆竖直状态插入海底;
31.随着下潜速度的增加,水动力逐渐增加,推动薄膜上翻,呈现倒立圆锥状,并覆盖在上方的圆环支撑杆组件上;
32.b、定速下潜功能:
33.在下潜初期,下潜速度逐渐增加,直至大于设定最大下潜速度vm,控制器通过速度传感器感知到这一状态时,增加介电体薄膜的驱动电压,促进介电体薄膜伸展,增加迎风面积,增加阻力,降低速度,直至下潜速度降低到vm,并维持该速度下潜;
34.c、自动扶正支杆过程:
35.在潜器坐底后,坐底支杆插入海底通常具有一定的倾斜度,此时,速度传感器测量到速度突降为零,以此触发控制器开启自动扶正程序;
36.扶正程序启动后,控制器会关闭介电体薄膜的驱动电源,并在tw分钟后开启,这期间介电体薄膜断电柔软,在介电体薄膜负浮力的作用下自然下垂,变成正立圆锥状,此后,控制器多次间歇开启驱动电压促使坐底支杆扶正,单次开启驱动电压的时长为ts,扶正过程主要由两个过程组成:
37.a)吸沙减阻过程:
38.当开启驱动电压时,介电体薄膜会等比例伸长,导致腔体膨大,腔体内部形成负压,吸入海底泥沙水,在驱动电压稳定的时间ts内,泥沙沉积在腔体底部,上层为轻油或者澄净的海水,关闭驱动电压后,介电体薄膜会收缩恢复,挤压腔体内的液体流入坐底支杆底部的海底,由于上流水孔位于腔体的上方,挤压时会优先将上层的轻油或者水挤压进支杆下方,经过多次挤压,坐底支杆底部的泥沙量逐渐减小,底部泥沙的含水率或含油率也逐渐增加,最终减小扶正支杆的阻力;
39.b)晃动和扶正支杆的过程:
40.当开启驱动电压时,介电体薄膜会等比例伸长,介电体薄膜为圆锥形,关于坐底支杆轴对称,伸长后会导致倾斜一侧的下方首先接触海底,介电体薄膜伸长后会推动海底产生反作用力,推动坐底支杆扶正,形成单次推动;
41.经过多次吸沙和晃动坐底支杆,大幅减小扶正所需的推力,促进坐底支杆扶正;
42.最终,坐底支杆的倾斜度逐渐减小,直至另一侧的介电体薄膜也成功坐底,坐底支杆与海底垂直,实现坐底支杆的扶正工作;
43.d、自动调节插入海底深度:
44.在扶正后,如果坐底支杆插入海底深度不够,触底开关没有触底,电路仍然处于开通状态,控制器会持续控制介电体薄膜的收缩和伸长,促进坐底支杆继续插入海底,具体有以下两个过程:
45.a)吸沙过程:
46.介电体薄膜在通电后伸展外凸,腔体内压力减小,将坐底支杆底部的泥沙水通过流道吸入腔体,控制器维持该电压一段时间,等待腔体内泥沙沉降完毕,上方为较为清澈的水或轻质油,控制器改变电压,介电体薄膜收缩,压缩腔体,将上层油或水挤入坐底支杆底部,经过以上多次操作,坐底支杆底部的泥沙逐渐减少,对坐底支杆的支撑逐渐减弱,在潜器负浮力的作用下,坐底支杆逐渐下潜。
47.则下方的圆锥薄膜也在同步伸缩,圆锥薄膜在伸长后,推动海底,形成对坐底支杆向上的反推力,圆锥薄膜松弛后,对坐底支杆的支撑力消失,坐底支杆在负浮力的作用下下沉,由此形成对坐底支杆的抬升和下沉的打桩过程,通过这样的多次打桩,有效松软海底底质,便于坐底支杆打桩插入;
48.通过多次的吸沙和打桩,可以逐步的增加坐底支杆的插入深度,避免了一次按压坐底支杆插入的难度;
49.e、自动触发待机过程:
50.随着坐底支杆插入深度增加,底部的二号导向环开始触底,二号导向环在坐底支杆上逐渐上移,一号磁铁与二号磁铁之间距离减小,磁斥力推动二号磁铁上移,二号磁铁带动导电片离开控制箱壳体悬浮,电路断开,系统断电待机,此时,达到设定的插入海底深度;
51.f、收集海底底质过程:
52.在扶正和打桩插入过程中,薄膜腔体会持续间歇性的扩张收缩,吸入海底泥沙,并在沉淀后,喷出清水,实现海底泥沙底质的采集,坐底结束后,泥沙存储在上方的薄膜腔体中,在任务完成后跟随潜器上浮;
53.g、自动抗扰动功能:
54.在长期驻留海底中,海流扰动会导致坐底支杆插入海底的深度减小,本装置可以自动抗扰动,恢复到竖直状态和原来设定的插入深度,具体过程如下:
55.一旦坐底支杆向上拔起,海底对圆环的支撑力消失,在重力的作用下,导向环自然下垂,一号磁铁也会跟着二号导向环下垂,与二号磁铁的距离增加,对二号磁铁的磁斥力减小,二号弹簧推动二号磁铁带着导电片压到控制箱壳体上,此时电路连通,介电体薄膜受到驱动电压作用,开始扶正和打桩作业,直至坐底支杆插入到设定深度后,系统关闭开始待机;
56.h、辅助离底拔出过程:
57.在离底拔出坐底支杆时,坐底支杆下方会形成负压增加离底吸附力,导致离底困难,坐底支杆具有内流道,上方接通到薄膜腔体内,离底时,薄膜腔体内的水会经过流道被吸入到坐底支杆下方进行填充补偿,大幅减小吸附力,便于离底。
58.本发明的有益效果如下:
59.本发明结构紧凑、合理,操作方便,利用介电体薄膜柔软和通电变形的特性,在下潜和坐底时进行主动控制,辅助坐底支杆竖直插入海底,增加插入深度,增强坐底的安全性。在下潜过程中,薄膜上翻呈现倒圆锥状,起到稳定翼的作用,并可以调整下潜速度。坐底后,薄膜伸展支撑支杆扶正,再推动支杆上下浮沉打桩增加插入深度。薄膜凹腔伸展形成负压,吸出支杆下方的泥沙,促进支杆插入。扶正和打桩过程均小幅多次进行,大幅减小所需要的推力。当支杆插入特定深度后,会自动断电待机。在长期驻留过程中,一旦装置插入深度减小,会自动触发设备,恢复到设定深度。该装置不惧外压,可全海深运行,并且噪音低、全自动操作,为深海潜水器支杆安全坐底提供了新的装置和方法。
60.同时,本发明还具备如下优点:
61.(1)无动力下潜过程中,带有轻油囊下潜,提高了稳性高,便于维持竖直状态插入海底。可以降低下潜速度,允许设备具有更大的负浮力。自动控制实现定速下潜。
62.(2)支杆插入海底后,自动开启扶正和打桩功能,在完成设定任务后自动关闭。
63.(3)采用介电体薄膜小幅多次伸展来实现支杆扶正和下插,大幅减小推力需求,减小设备体积和重量。
64.(4)无需采用深海电机或液压设备,消除了主要的噪声源,大幅增加隐蔽性。
65.(5)长期驻留中,当支杆插入海底深度减小,本装置会自动启动,维持竖直状态和一定的插入深度。
66.(6)不存在耐压问题,适用于全海深。
67.(7)离底时,减小海底对支杆的吸附力。
附图说明
68.图1为本发明的结构示意图。
69.图2为本发明的介电体薄膜腔体的结构示意图。
70.图3为本发明坐底支杆的剖面图。
71.图4为本发明触底开关的局部示意图(开通状态)。
72.图5为本发明触底开关的局部示意图(关闭状态)。
73.图6为本发明薄膜的展开图。
74.图7为本发明薄膜的截面图。
75.图8为本发明自动扶正过程的简化示意图。
76.其中:
77.0、海底面;
78.1、坐底支杆;
79.101、流道;102、上流水孔;103、下流水孔;104、水溶性固体堵头;
80.2、介电体薄膜;
81.2101、一号保护膜;2102、二号保护膜;
82.2201、一号柔性电极;2202、二号柔性电极;
83.23、介电体材料;
84.3、圆环支撑杆组件;
85.31、圆环杆;32、支撑杆;33、二号橡胶紧固环;
86.4、触底开关;
87.4101、一号导向环;4102、二号导向环;
88.42、紧固螺母;
89.4301、一号弹簧;4302、二号弹簧;
90.4401、一号磁铁;4402、二号磁铁;
91.45、控制箱壳体;46、导电片;47、控制器;48、水密接插件;49、速度传感器;410、信号线;
92.5、一号橡胶紧固环;
93.电导线系统:
94.61、一号电导线;62、二号电导线;63、三号电导线;64、四号电导线;65、五号电导线;
95.7、薄膜腔体;
96.8、潜器本体;
97.潜器本体包括耐压舱、电池、探测设备等。
具体实施方式
98.下面结合附图,说明本发明的具体实施方式。
99.如图1-图8所示,本实施例的深海坐底支杆自动扶正装置,包括海底面0,海底面0上插入有坐底支杆1,坐底支杆1的外部套有介电体薄膜2,介电体薄膜2的上部和下部分别通过一号橡胶紧固环5和二号橡胶紧固环33进行垂向位置的约束和密封,位于一号橡胶紧固环5和二号橡胶紧固环33之间的介电体薄膜2内部形成薄膜腔体7;还包括圆环支撑杆组件3,圆环支撑杆组件3的上方设置有圆环杆31,圆环杆31的圆周方向均匀间隔插入有四根支撑杆32,支撑杆32的上部与圆环杆31焊接,支撑杆32的下部插入至二号橡胶紧固环33中;坐底支杆1的底部设置有触底开关4,触底开关4上方通过电导线连接潜器本体8。
100.坐底支杆1的主体呈圆柱状结构,坐底支杆1的内部垂直方向设置有流道101,位于流道101上方设置有与坐底支杆1侧壁连通的上流水孔102,位于坐底支杆1的底部设置有下流水孔103,下流水孔103处设置有水溶性固体堵头104。
101.上流水孔102位于薄膜腔体7的内部,并靠近上方。
102.在下潜之前,薄膜腔体7和支杆流道101内充有轻油。
103.介电体薄膜2展开后呈圆环状结构,。
104.介电体薄膜2由五层材料组成,中间为介电体材料23,介电体材料23的上下端分别为一号柔性电极2201和二号柔性电极2202,一号柔性电极2201的外层为一号保护膜2101,二号柔性电极2202的外层为二号保护膜2102。
105.圆环杆31的外径大于二号橡胶紧固环33的外径。
106.触底开关4的结构为:包括上下间隔固定在坐底支杆1上的一号导向环4101和二号导向环4102,一号导向环4101和二号导向环4102之间焊接有一号弹簧4301,二号导向环4102的右端粘贴有一号磁铁4401,一号导向环4101的端部焊接有控制箱壳体45,控制箱壳体45内充有绝缘气体或者液体,控制箱壳体45内底部设置有导电片46,二号磁铁4402通过胶水粘贴于下的导电片46上,一号磁铁4401和二号磁铁4402的极性相反,二号磁铁4402与控制箱壳体45内顶面之间设置有二号弹簧4302,控制箱壳体45的外侧安装有速度传感器49,控制箱壳体45内安装有控制器47,控制箱壳体45上安装水密接插件48。
107.二号导向环4102沿着坐底支杆1上下滑动,导电片46和控制箱壳体45均为可导电不带磁性的金属材料。
108.本实施例的深海坐底支杆自动扶正装置的操作方法,。
109.设定坐底支杆1的插入深度:对控制箱壳体45在坐底支杆1上的高度进行调整,设定坐底支杆2插入海底的目标深度;
110.然后,控制参数设定:通过遥控设备与控制器47进行通讯,对控制器47中自动控制程序中的参数进行设定,主要为以下三个:
111.1、自由下潜过程中的最大下潜速度vm;
112.2、坐底后再次开启驱动电压的等待时间tw,通常设定为10分钟;
113.3、扶正或打桩辅助支杆插入过程中,单次开启驱动电压的稳定时长ts,间隔也是
ts,通常设定为5分钟;
114.其次,设备充油:
115.在下水前将本装置倒立,通过下流水孔103倒入轻油,直至充满薄膜腔体7和支杆流道101;
116.将水溶性固体堵头104塞入下流水孔103,封堵出口,防止下水前轻油泄露。
117.在负浮力的作用下无动力下潜;
118.下潜过程中触底开关4为开通状态;
119.下水后,水溶性固体堵头104会快速溶解,下流水孔103敞开,轻油与海水连通,压力平衡;在下潜过程中,底座支杆1基本处于竖直状态;轻油密度小于水,在正浮力的作用下始终处于流道101和薄膜腔体7内,因此,在下潜过程中,轻油给潜器持续提供正浮力,轻油处于潜器上方,提高潜器的浮心,增加稳性高,有利于维持底座支杆1竖直状态插入海底;
120.随着下潜速度的增加,水动力逐渐增加,推动薄膜上翻,呈现倒立圆锥状,并覆盖在上方的圆环支撑杆组件3上;
121.b、定速下潜功能:
122.在下潜初期,下潜速度逐渐增加,直至大于设定最大下潜速度vm,控制器47通过速度传感器49感知到这一状态时,增加介电质薄膜2的驱动电压,促进介电质薄膜2伸展,增加迎风面积,增加阻力,降低速度,直至下潜速度降低到vm,并维持该速度下潜;
123.c、自动扶正支杆过程:
124.在潜器坐底后,坐底支杆1插入海底通常具有一定的倾斜度,此时,速度传感器49测量到速度突降为零,以此触发控制器47开启自动扶正程序;
125.扶正程序启动后,控制器47会关闭介电质薄膜2的驱动电源,并在tw分钟后开启,这期间介电质薄膜2断电柔软,在介电质薄膜2负浮力的作用下自然下垂,变成正立圆锥状,此后,控制器47多次间歇开启驱动电压促使坐底支杆1扶正,单次开启驱动电压的时长为ts,扶正过程主要由两个过程组成:
126.a)吸沙减阻过程:
127.当开启驱动电压时,介电质薄膜2会等比例伸长,导致薄膜腔体7膨大,腔体内部形成负压,吸入海底泥沙水,在驱动电压稳定的时间ts内,泥沙沉积在腔体底部,上层为轻油或者澄净的海水,关闭驱动电压后,介电质薄膜2会收缩恢复,挤压腔体内的液体流入坐底支杆底部的海底,由于上流水孔102位于腔体的上方,挤压时会优先将上层的轻油或者水挤压进支杆下方,经过多次挤压,坐底支杆1底部的泥沙量逐渐减小,底部泥沙的含水率或含油率也逐渐增加,最终减小扶正支杆的阻力;
128.b)晃动和扶正支杆的过程:
129.当开启驱动电压时,介电质薄膜2会等比例伸长,介电质薄膜2为圆锥形,关于坐底支杆1轴对称,伸长后会导致倾斜一侧的下方首先接触海底,介电质薄膜2伸长后会推动海底产生反作用力,推动坐底支杆1扶正,形成单次推动;
130.经过多次吸沙和晃动坐底支杆1,大幅减小扶正所需的推力,促进坐底支杆1扶正;
131.最终,坐底支杆1的倾斜度逐渐减小,直至另一侧的介电质薄膜2也成功坐底,坐底支杆1与海底垂直,实现坐底支杆1的扶正工作;
132.d、自动调节插入海底深度:
133.在扶正后,如果坐底支杆1插入海底深度不够,触底开关4没有触底,电路仍然处于开通状态,控制器47会持续控制介电质薄膜2的收缩和伸长,促进坐底支杆1继续插入海底,具体有以下两个过程:
134.a)吸沙过程:
135.介电质薄膜2在通电后伸展外凸,薄膜腔体7内压力减小,将坐底支杆1底部的泥沙水通过流道101吸入薄膜腔体7,控制器47维持该电压一段时间,等待薄膜腔体7内泥沙沉降完毕,上方为较为清澈的水或轻质油,控制器47改变电压,介电质薄膜2收缩,压缩薄膜腔体7,将上层油或水挤入坐底支杆1底部,经过以上多次操作,坐底支杆1底部的泥沙逐渐减少,对坐底支杆1的支撑逐渐减弱,在潜器负浮力的作用下,坐底支杆1逐渐下潜。
136.则下方的圆锥薄膜也在同步伸缩,圆锥薄膜在伸长后,推动海底,形成对坐底支杆1向上的反推力,圆锥薄膜松弛后,对坐底支杆1的支撑力消失,坐底支杆1在负浮力的作用下下沉,由此形成对坐底支杆1的抬升和下沉的打桩过程,通过这样的多次打桩,有效松软海底底质,便于坐底支杆1打桩插入;
137.通过多次的吸沙和打桩,可以逐步的增加坐底支杆1的插入深度,避免了一次按压坐底支杆1插入的难度;
138.e、自动触发待机过程:
139.随着坐底支杆1插入深度增加,底部的二号导向环4102开始触底,二号导向环4102在坐底支杆1上逐渐上移,一号磁铁4401与二号磁铁4402之间距离减小,磁斥力推动二号磁铁4402上移,二号磁铁4402带动导电片46离开控制箱壳体45悬浮,电路断开,系统断电待机,此时,达到设定的插入海底深度;
140.f、收集海底底质过程:
141.在扶正和打桩插入过程中,薄膜腔体7会持续间歇性的扩张收缩,吸入海底泥沙,并在沉淀后,喷出清水,实现海底泥沙底质的采集,坐底结束后,泥沙存储在上方的薄膜腔体7中,在任务完成后跟随潜器上浮;
142.g、自动抗扰动功能:
143.在长期驻留海底中,海流扰动会导致坐底支杆1插入海底的深度减小,本装置可以自动抗扰动,恢复到竖直状态和原来设定的插入深度,具体过程如下:
144.一旦坐底支杆1向上拔起,海底对圆环的支撑力消失,在重力的作用下,二号导向环4102自然下垂,一号磁铁4401也会跟着二号导向环4102下垂,与二号磁铁4402的距离增加,对二号磁铁4402的磁斥力减小,二号弹簧4302推动二号磁铁4402带着导电片46压到控制箱壳体45上,此时电路连通,介电体薄膜2受到驱动电压作用,开始扶正和打桩作业,直至坐底支杆1插入到设定深度后,系统关闭开始待机;
145.h、辅助离底拔出过程:
146.在离底拔出坐底支杆1时,坐底支杆1下方会形成负压增加离底吸附力,导致离底困难,坐底支杆1具有内流道,上方接通到薄膜腔体7内,离底时,薄膜腔体7内的水会经过流道101被吸入到坐底支杆1下方进行填充补偿,大幅减小吸附力,便于离底。
147.本发明深海坐底支杆自动扶正装置的具体结构和功能如下:
148.主要由坐底支杆1、介电体薄膜2、圆环支撑杆组件3、触底开关4、一号橡胶紧固环5、电导线系统等组成。
149.其中坐底支杆1:
150.坐底支杆1主体为圆柱,下方带有半椭球凸体,内部有流道101,在中上部具有上流水孔102,在底部具有下流水孔103。水溶性固体堵头104用于在下水之前封堵下流水孔103。水溶性固体堵头104不可溶于支杆流道内的轻油,可迅速溶于水,且不产生气体。
151.介电体薄膜2:
152.介电体薄膜2展开后为圆环状,套于坐底支杆1上,并通过一号橡胶紧固环5和二号橡胶紧固环33进行垂向位置的约束和密封。因此二者之间形成密闭的薄膜腔体7,上流水孔102位于薄膜腔体7内,并靠近上方。在下潜之前薄膜腔体7和支杆流道101内充有轻油。在下潜过程中,轻油提供正浮力。轻油需不溶于水、低粘度、无腐蚀性,并且密度小于水,比如汽油(密度0.74g/ml)。
153.介电体薄膜2由五层材料组成,中间为介电体材料23,最外面为一号保护膜2101和二号保护膜2102,这两者中间为一号柔性电极2201和二号柔性电极2202。二号电导线62和三号电导线63通过保护膜深入到柔性电极,由于驱动电压的输入。介电体材料23在电场力的作用下产生变形,厚度减小,面积扩张。一号保护膜2101和二号保护膜2102具有弹性和负浮力,实现整个薄膜2为水下负浮力。
154.圆环支撑杆组件3:
155.圆环支撑杆组件3由圆环杆31、四根支撑杆32和二号橡胶紧固环33组成。支撑杆32上方焊接到圆环杆31上,下方插入到二号橡胶紧固环33上。
156.电导线系统:
157.电导线系统由一号电导线61、二号电导线62、三号电导线63、四号电导线64、五号电导线65组成,用于传递电力。
158.一号电导线61与三号电导线63接于潜器主电源,二者极性相反。四号电导线64接于三号电导线63上。
159.一号电导线61和三号电导线63均通过薄膜2与坐底支杆1之间的缝隙进入到薄膜2下方,并接入触底开关4。
160.一号电导线61通过水密接插件48进控制箱壳体45内,并接到控制器47上。
161.水密接插件48镶嵌在控制箱壳体45上。
162.控制器47下方的焊接到导电片46上,控制器47的电压直接输出到导电片46上,控制器47串联到电路上,可以控制电压的大小。
163.五号电导线65连接到一号电导线61上,五号电导线65和四号电导线64接入速度传感器49,用于提供电能。速度传感器49采集潜器速度,通过信号线410传入控制箱壳体45内的控制器47上,用于速度信号的反馈,信号线410也是通过水密接插件48进行密封。
164.水密接插件48为非金属材质,可以传递无线电信号。
165.触底开关4:
166.一号导向环4101通过紧固螺母42固定在坐底支杆1上,一号弹簧4301和控制箱壳体45焊接于一号导向环4101上,二号导向环4102套在坐底支杆1上,可以自由上下滑动,但是上方焊接在一号弹簧4301上,因而受到约束,处于悬垂状态。二号导向环4102右边粘贴有一号磁铁4401,控制箱壳体45内充有绝缘气体或者液体,二号磁铁4402通过胶水粘贴于下的导电片46上,导电片46和控制箱壳体45均为可导电不带磁性的金属材料。一号磁铁4401
和二号磁铁4402靠近的面极性相反,具有互斥推力。二号电导线62接在控制箱壳体45上,二号弹簧4302上方焊接到控制箱壳体45上,下方粘接到二号磁铁4402上。
167.控制器47为多功能模块,串联于电路上,可以调节薄膜的驱动电压。控制器47与触底开关4串联于电路上,需要二者同时开启介电体薄膜2才能受到驱动电压。控制器47有无线电通讯功能,水密接插件48可以作为无线电信道。在下潜前,可以通过无线电信号进行控制器47参数的修改。控制器47内存有定速下潜控制程序、坐底扶正打桩控制程序,并根据潜器速度量触发自动激活。
168.速度传感器49通过四号电导线64和五号电导线65与上方潜器主电源相接,始终处于通电状态,因此,一直在测量速度,并通过信号线410将速度信号传入控制器47。
169.实际使用过程中:
170.(一)下潜前的准备工作:
171.首先,设定坐底支杆1的插入深度:调节紧固螺母42,对控制箱壳体45在坐底支杆1上的高度进行调整,设定坐底支杆2插入海底的目标深度。
172.然后,控制参数设定:通过专用的遥控设备与控制器47进行通讯,对控制器47中自动控制程序中的参数进行设定,主要为以下三个:
173.1、自由下潜过程中的最大下潜速度vm;
174.2、坐底后再次开启驱动电压的等待时间tw,通常设定为10分钟;
175.3、扶正或打桩辅助支杆插入过程中,单次开启驱动电压的稳定时长ts,间隔也是ts,通常设定为5分钟。
176.其次,设备充油:
177.在下水前将本装置倒立,通过下流水孔103倒入轻油,直至充满薄膜腔体7和支杆流道101。
178.将水溶性固体堵头104塞入下流水孔103,封堵出口,防止下水前轻油泄露。
179.(二)下潜过程定速功能:
180.a、自由下潜初期:
181.潜器从母船抛下后,在负浮力的作用下无动力下潜。
182.下潜过程中触底开关4为开通状态。
183.下水后,水溶性固体堵头104会快速溶解,下流水孔103敞开,轻油与海水连通,压力平衡。在下潜过程中,支杆基本处于竖直状态。轻油密度小于水,在正浮力的作用下始终处于流道和薄膜腔体7内。因此,在下潜过程中,轻油给潜器持续提供正浮力。轻油处于潜器上方,提高l潜器的浮心,增加稳性高,有利于维持支杆竖直状态插入海底。
184.随着下潜速度的增加,水动力逐渐增加,推动薄膜上翻,呈现倒立圆锥状,并覆盖在上方的圆环支撑杆组件3上,如图5所示。支撑杆32支撑薄膜2,避免其变形。倒立圆锥膜处于潜器的上方,起到稳定翼的作用。既可以增加横摇、纵摇阻尼,抑制潜器晃动,也会增加潜器的动稳定性,促进支杆竖直下潜。
185.b、定速下潜功能:
186.在下潜初期,下潜速度逐渐增加,直至大于设定最大下潜速度vm。控制器47通过速度传感器49感知到这一状态时,增加薄膜的驱动电压,促进薄膜2伸展,增加迎风面积,增加阻力,降低速度,直至下潜速度降低到vm,并维持该速度下潜。
187.c、自动扶正支杆过程:
188.在潜器坐底后,坐底支杆1插入海底通常具有一定的倾斜度。此时,速度传感器49测量到速度突降为零,以此触发控制器47开启自动扶正程序。
189.扶正程序启动后,控制器47会关闭薄膜的驱动电源,并在tw分钟后开启。这期间薄膜2断电柔软,在薄膜2负浮力的作用下自然下垂,变成正立圆锥状。此后,控制器47多次间歇开启驱动电压促使支杆扶正,单次开启驱动电压的时长为ts。扶正过程主要由2个过程组成:
190.a)吸沙减阻过程:
191.当开启驱动电压时,薄膜2会等比例伸长,导致薄膜腔体7膨大,腔体内部形成负压,吸入海底泥沙水。在驱动电压稳定的时间ts内,泥沙沉积在腔体底部,上层为轻油或者澄净的海水。关闭驱动电压后,薄膜会收缩恢复,挤压腔体内的液体流入坐底支杆底部的海底。由于上流水孔102位于腔体的上方,挤压时会优先将上层的轻油或者水挤压进支杆下方。经过多次挤压,支杆底部的泥沙量逐渐减小,底部泥沙的含水率或含油率也逐渐增加,最终减小扶正支杆的阻力。
192.b)晃动和扶正支杆的过程:
193.当开启驱动电压时,薄膜2会等比例伸长。薄膜2为圆锥形,关于坐底支杆1轴对称,伸长后会导致倾斜一侧的下方首先接触海底。薄膜2伸长后会推动海底产生反作用力,推动支杆扶正,形成单次推动,如图6所示。如果单次无法将支杆扶正,薄膜2会自动外凸,释放应力,避免破坏薄膜。
194.经过多次吸沙和晃动支杆,大幅减小扶正所需的推力,促进支杆扶正。
195.最终,支杆的倾斜度逐渐减小,直至另一侧的薄膜也成功坐底,支杆与海底垂直,实现支杆扶正。
196.d、自动调节插入海底深度:
197.在扶正后,如果支杆插入海底深度不够,触底开关4没有触底,电路仍然处于开通状态。控制器47会持续控制薄膜2的收缩和伸长,促进支杆继续插入海底。具体有以下2个过程:
198.a)吸沙过程:
199.薄膜2在通电后伸展外凸,薄膜腔体7内压力减小,将支杆底部的泥沙水通过流道101吸入薄膜腔体7。控制器47维持该电压一段时间,等待薄膜腔体7内泥沙沉降完毕,上方为较为清澈的水或轻质油。控制器47改变电压,薄膜2收缩,压缩薄膜腔体7,将上层油或水挤入坐底支杆1底部。经过以上多次操作,坐底支杆1底部的泥沙逐渐减少,对坐底支杆1的支撑逐渐减弱,在潜器负浮力的作用下,坐底支杆1逐渐下潜。
200.b)打桩过程:
201.薄膜2在驱动电压的控制下持续伸缩,则下方的圆锥薄膜也在同步伸缩。圆锥薄膜2在伸长后,推动海底,形成对坐底支杆1向上的反推力。圆锥薄膜松弛后,对坐底支杆1的支撑力消失,坐底支杆1在负浮力的作用下下沉。由此形成对支杆的抬升和下沉的打桩过程,通过这样的多次打桩,有效松软海底底质,便于坐底支杆1打桩插入。
202.通过多次的吸沙和打桩,可以逐步的增加坐底支杆1的插入深度,避免了一次按压坐底支杆1插入的难度。
203.e、自动触发待机过程:
204.随着坐底支杆1插入深度增加,底部的二号导向环4102开始触底。二号导向环4102在坐底支杆1上逐渐上移,一号磁铁4401与二号磁铁4402之间距离减小,磁斥力推动二号磁铁4402上移。二号磁铁4402带动导电片46离开控制箱壳体45悬浮,电路断开,系统断电待机。此时,达到设定的插入海底深度。
205.f、收集海底底质过程:
206.在扶正和打桩插入过程中,薄膜腔体7会持续间歇性的扩张收缩,吸入海底泥沙,并在沉淀后,喷出清水,实现海底泥沙底质的采集。坐底结束后,泥沙存储在上方的薄膜腔体7中,在任务完成后跟随潜器上浮。
207.g、自动抗扰动功能:
208.在长期驻留海底中,海流扰动会导致坐底支杆1插入海底的深度减小,本装置可以自动抗扰动,恢复到竖直状态和原来设定的插入深度。具体过程如下:
209.一旦坐底支杆1向上拔起,海底对圆环的支撑力消失,在重力的作用下,二号导向环4102自然下垂,一号磁铁4401也会跟着二号导向环4102下垂,与二号磁铁4402的距离增加,对二号磁铁4402的磁斥力减小。二号弹簧4302推动二号磁铁4402带着导电片46压到控制箱壳体45上,此时电路连通。介电体薄膜2受到驱动电压作用,开始扶正和打桩作业,直至坐底支杆1插入到设定深度后,系统关闭开始待机。
210.h、辅助离底拔出过程:
211.在离底拔出坐底支杆1时,支杆1下方会形成负压增加离底吸附力,导致离底困难。本装置支杆1具有内流道,上方接通到薄膜腔体7内。离底时,薄膜腔体7内的水会经过流道101被吸入到支杆1下方进行填充补偿,大幅减小吸附力,便于离底。
212.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
