1.本发明涉及一种永磁同步电机位置估计方法,具体涉及一种基于霍尔传感器的永磁同步电机位置估计方法。
背景技术:
2.永磁同步电机具有高效、高功率密度等优点,被广阔应用于工业领域中。使用高精度位置传感器的永磁同步电机可以实现良好的控制效果,但是高精度传感器在恶劣环境下可靠性、稳定性会受到影响;使用电机的无传感器控制技术在重载启动等应用场合受限。使用霍尔传感器的电机控制系统稳定性好、使用寿命长,但是精度低导致传统方法在动态性能上表现不好,在诸如启动、负载波动等场合控制效果不佳,甚至可能出现失控等风险。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明所提供一种基于霍尔传感器的永磁同步电机位置估计方法,能够得到高分辨率精度的永磁同步电机的转子位置信息。
4.本发明采用的技术方案是:
5.本发明永磁同步电机位置估计方法包括如下步骤:
6.步骤1:采集安装有霍尔传感器的永磁同步电机当前时刻和前一时刻的三相电流值,根据永磁同步电机当前时刻和前一时刻的三相电流值获取前一时刻永磁同步电机的反电动势项;反电动势项包含转子转速位置信息;霍尔传感器安装在永磁同步电机的非驱动端,通过永磁同步电机的检测轴上安装的对应永磁体的小磁钢,检测电机转子位置。
7.永磁同步电机具体采用表贴式永磁同步电机,霍尔传感器是基于霍尔效应的三相霍尔传感器,可根据所对应磁极位置输出三相霍尔信号。
8.步骤2:获取当前时刻永磁同步电机转子的反馈估计角度,根据当前时刻永磁同步电机转子的反馈估计角度和前一时刻永磁同步电机的反电动势项,使用内积运算方法获取永磁同步电机的转子转速函数值,并通过查表法获取前一时刻永磁同步电机转子的转速。
9.步骤3:在永磁同步电机运行时,霍尔传感器输出霍尔信号,根据霍尔信号获得霍尔平均转速;获取前一时刻永磁同步电机转子的反馈转速,将前一时刻永磁同步电机转子的转速和反馈转速输入pi控制器,并将霍尔平均转速作为pi控制器的前馈输入,pi控制器输出永磁同步电机转子的电角速度,将永磁同步电机转子的电角速度进行离散积分获得永磁同步电机转子的位置,最终实现永磁同步电机的位置估计。在pi控制器控制误差收敛为零时即可得到高精度的永磁同步电机转子的电角速度;pi控制器同时输出当前时刻的永磁同步电机转子的反馈转速,以继续进行下一时刻永磁同步电机的位置估计。
10.每隔60
°
电角度可利用霍尔信号进行永磁同步电机转子的位置矫正,在霍尔扇区切换时更新转子位置,消除累计误差。
11.所述的步骤1中,根据永磁同步电机当前时刻和前一时刻的三相电流值获取永磁同步电机的反电动势项,具体为首先将永磁同步电机当前时刻和前一时刻的三相电流经过
坐标变换得到αβ坐标系下的α相静止电流和β相静止电流,即根据永磁同步电机当前时刻和前一时刻的三相电流值获取α相静止电流值和β相静止电流值,再根据永磁同步电机当前时刻和前一时刻的α相静止电流值和β相静止电流值获取永磁同步电机的反电动势项,具体如下:
[0012][0013]
其中,d[k-1]表示前一k-1时刻永磁同步电机的反电动势项;i
α
(k)和i
α
(k-1)分别表示永磁同步电机当前k时刻和前一k-1时刻的α相静止电流值,i
β
(k)和i
β
(k-1)分别表示永磁同步电机当前k时刻和前一k-1时刻的β相静止电流值;ua(k-1)和u
β
(k-1)分别表示永磁同步电机前一k-1时刻的α相电压值和β相电压值;永磁同步电机前一k-1时刻的电压值由矢量控制目标电压值直接给出,即为预设值,无需采样,将永磁同步电机前一k-1时刻的电压值经过坐标变换得到αβ坐标系下的α相电压值和β相电压值。a和b分别为永磁同步电机的反电动势项的第一常数项和第二常数项。
[0014]
所述的永磁同步电机的反电动势项的第一常数项和第二常数项,具体如下:
[0015][0016]
其中,ts表示永磁同步电机的电流环控制周期;rs表示永磁同步电机的电机定子电阻;ls表示永磁同步电机的电机交直轴电感。
[0017]
所述的步骤2中,根据当前时刻永磁同步电机转子的反馈估计角度和前一时刻永磁同步电机的反电动势项,使用内积运算方法获取永磁同步电机的转子转速函数值f(ωe),并通过查表法获取前一时刻永磁同步电机转子的转速,具体如下:
[0018][0019][0020]
其中,ψf表示永磁同步电机的永磁体磁链;ωe[k-1]表示前一k-1时刻永磁同步电机转子的转速;θe[k]和θe[k-1]分别表示当前k时刻和前一k-1时刻永磁同步电机转子的估计角度,即分别表示下一时刻和当前k时刻永磁同步电机转子的反馈估计角度。
[0021]
所述的步骤3中,根据霍尔信号获得霍尔平均转速,具体如下:
[0022][0023]
其中,ω
ehall
表示霍尔平均转速,δt表示霍尔传感器上一个霍尔扇区的持续时间。
[0024]
本发明的有益效果是:
[0025]
本发明使用霍尔传感器能够得到高分辨率精度的永磁同步电机的转子转速和转
子位置信息,并可以实现对永磁同步电机位置的矫正估计。本发明方法在低速阶段,可以弥补霍尔传感器更新滞后带来的角度估计误差,中高速阶段霍尔信号估计准确,将其作为pi控制器的前馈输入可以消除噪声干扰,实现电机良好的稳态和动态性能。
附图说明
[0026]
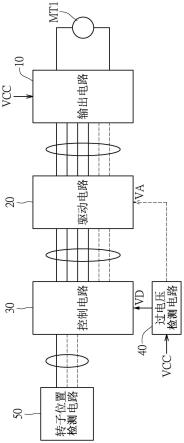
图1为本发明实施例永磁同步电机系统控制框图。
[0027]
图2为本发明永磁同步电机位置估计方法框图。
[0028]
图3为本发明仿真启动过程中永磁同步电机的转速、转子位置和位置误差波形图。
[0029]
图4为本发明负载波动过程中永磁同步电机的转速、转子位置、位置误差和dq轴电流波形图。
具体实施方式
[0030]
下面结合附图及具体实施例对本发明作进一步详细说明。
[0031]
如图2所示,本发明永磁同步电机位置估计方法包括如下步骤:
[0032]
步骤1:采集安装有霍尔传感器的永磁同步电机当前时刻和前一时刻的三相电流值,根据永磁同步电机当前时刻和前一时刻的三相电流值获取前一时刻永磁同步电机的反电动势项;反电动势项包含转子转速位置信息;霍尔传感器安装在永磁同步电机的非驱动端,通过永磁同步电机的检测轴上安装的对应永磁体的小磁钢,检测电机转子位置。
[0033]
永磁同步电机具体采用表贴式永磁同步电机,霍尔传感器是基于霍尔效应的三相霍尔传感器,可根据所对应磁极位置输出三相霍尔信号。
[0034]
步骤1中,根据永磁同步电机当前时刻和前一时刻的三相电流值获取永磁同步电机的反电动势项,具体为首先将永磁同步电机当前时刻和前一时刻的三相电流经过坐标变换得到αβ坐标系下的α相静止电流和β相静止电流,即根据永磁同步电机当前时刻和前一时刻的三相电流值获取α相静止电流值和β相静止电流值,再根据永磁同步电机当前时刻和前一时刻的α相静止电流值和β相静止电流值获取永磁同步电机的反电动势项,具体如下:
[0035][0036]
其中,d[k-1]表示前一k-1时刻永磁同步电机的反电动势项;i
α
(k)和i
α
(k-1)分别表示永磁同步电机当前k时刻和前一k-1时刻的α相静止电流值,i
β
(k)和i
β
(k-1)分别表示永磁同步电机当前k时刻和前一k-1时刻的β相静止电流值;u
α
(k-1)和u
β
(k-1)分别表示永磁同步电机前一k-1时刻的α相电压值和β相电压值;永磁同步电机前一k-1时刻的电压值由矢量控制目标电压值直接给出,即为预设值,无需采样,将永磁同步电机前一k-1时刻的电压值经过坐标变换得到αβ坐标系下的α相电压值和β相电压值。a和b分别为永磁同步电机的反电动势项的第一常数项和第二常数项。
[0037]
永磁同步电机的反电动势项的第一常数项和第二常数项,具体如下:
[0038]
[0039]
其中,ts表示永磁同步电机的电流环控制周期;rs表示永磁同步电机的电机定子电阻;ls表示永磁同步电机的电机交直轴电感。
[0040]
步骤2:获取当前时刻永磁同步电机转子的反馈估计角度,根据当前时刻永磁同步电机转子的反馈估计角度和前一时刻永磁同步电机的反电动势项,使用内积运算方法获取永磁同步电机的转子转速函数值,并通过查表法获取前一时刻永磁同步电机转子的转速。
[0041]
步骤2中,根据当前时刻永磁同步电机转子的反馈估计角度和前一时刻永磁同步电机的反电动势项,使用内积运算方法获取永磁同步电机的转子转速函数值f(ωe),并通过查表法获取前一时刻永磁同步电机转子的转速,具体如下:
[0042][0043][0044]
其中,ψf表示永磁同步电机的永磁体磁链;ωe[k-1]表示前一k-1时刻永磁同步电机转子的转速;θe[k]和θe[k-1]分别表示当前k时刻和前一k-1时刻永磁同步电机转子的估计角度,即分别表示下一时刻和当前k时刻永磁同步电机转子的反馈估计角度。
[0045]
步骤3:在永磁同步电机运行时,霍尔传感器输出霍尔信号,根据霍尔信号获得霍尔平均转速;获取前一时刻永磁同步电机转子的反馈转速ω
e’[k-1],将前一时刻永磁同步电机转子的转速和反馈转速输入pi控制器,并将霍尔平均转速作为pi控制器的前馈输入,pi控制器输出永磁同步电机转子的电角速度,将永磁同步电机转子的电角速度进行离散积分获得永磁同步电机转子的位置,最终实现永磁同步电机的位置估计。在pi控制器控制误差收敛为零时即可得到高精度的永磁同步电机转子的电角速度;pi控制器同时输出当前时刻的永磁同步电机转子的反馈转速,以继续进行下一时刻永磁同步电机的位置估计。
[0046]
步骤3中,根据霍尔信号获得霍尔平均转速,具体如下:
[0047][0048]
其中,ω
ehall
表示霍尔平均转速,δt表示霍尔传感器上一个霍尔扇区的持续时间。
[0049]
每隔60
°
电角度可利用霍尔信号hall
abc
进行永磁同步电机转子的位置矫正,在霍尔扇区切换时更新转子位置,消除累计误差。
[0050]
如图1所示,本发明针对一台使用电压源型逆变器供电的基于霍尔位置传感器的表贴式永磁同步电机在电机位置估计后进行仿真,所述电机及逆变器参数如下表1所示:
[0051]
表1永磁同步电机及逆变器参数
[0052]
[0053][0054]
本发明方法电机位置估计获得了永磁同步电机转子的电角速度,将永磁同步电机转子的电角速度转化为机械角速度,具体如下:
[0055][0056]
其中,ωr表示永磁同步电机转子的机械角速度;pn表示永磁同步电机的电机极对数,具体实施中取4;ωe表示永磁同步电机转子的电角速度。
[0057]
如图1所示的电机系统控制过程中,ia和ib是电机采样得到的相电流,ωr是机械角速度,ω
r*
是目标控制转速,与ωr经过pi运算得到q轴电流给定i
q*
,之后静止轴系目标电流i
d*
和i
q*
经过pi运算分别得到静止轴系目标电压u
d*
和u
q*
,其中表贴式永磁同步电机i
d*
通常给0。然后经过坐标变换求得旋转轴系电压u
α*
和u
β*
,输入svpwm得到逆变器的控制脉冲信号,实现永磁同步电机的运行,如图3所示,为仿真启动过程中永磁同步电机的转速、转子位置和位置误差波形图,如图4所示,为负载波动过程中永磁同步电机的转速、转子位置、位置误差和dq轴电流波形图,可以看出永磁同步电机具有良好的稳态和动态性能。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。