1.本发明涉及变电站取油样技术领域,尤其是涉及一种变电站取油样机器人。
背景技术:
2.传统变电站通常采用人工方式对变压器进行油样采集及检测,大多数取样环境都处于高危生产作业区域,工作人员通常需要多重防护措施才能开展,安全流程繁琐,存在检查不便、频次低的问题。并且人工采样有操作不规范、劳动强度大、工作效率低、取样方式粗糙等缺陷。
3.现有方案也存在通过取油样机器人的方式进行油样采集,如公开号为cn112229683a的发明公开了一种变压器油样采集机器人,包括行走机构以及设置在所述行走机构上的取油装置、导航装置、导向机构、通信装置和控制装置;其中,所述控制装置与所述导航装置电连接,用以控制所述导航装置指引所述行走机构沿预设路径行进至变压器的取油位置处,实现所述行走机构与所述取油位置之间的粗定位;所述导向机构设置在所述取油装置的上方,且所述导向机构与所述控制装置电连接,用以在所述控制装置的控制下对所述取油装置进行导向,以使所述取油装置对准所述变压器的取油位置,实现所述取油装置与所述取油位置之间的精细定位;所述控制装置还与所述通信装置和所述取油装置电连接,用以在所述行走机构行进至所述变压器的取油位置处时,控制所述通信装置与所述变压器的取油位置处的电动阀进行信息交互,从而控制设置在所述变压器的取油位置处的电动阀动作,进而使得所述取油装置经所述变压器的取油位置采集油样。
4.上述方案需要在变压器取油位置安装电磁阀,通用性差,安装维护成本高。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种能够提高工作效率和安全的变电站取油样机器人。
6.本发明的目的可以通过以下技术方案来实现:
7.一种变电站取油样机器人,包括智能移动组件,其特征在于,该机器人还包括机械手抓取组件、取油样辅助组件和辅助取油样平台组件;
8.所述机器手抓取组件包括机械手本体单元和机械手爪单元,所述机械手爪单元安装在机械手本体单元的一端,所述机械手本体的另一端安装固定在智能移动组件上;
9.所述取油样辅助组件包括油样瓶和阀门开闭工装,所述机械手爪单元设有与油样瓶相配合的第一抓取部以及与阀门开闭工装相配合的第二抓取部;
10.所述取油样平台组件包括连接油管道的辅助取油样工装,所述油管道设有油管开闭阀门,所述辅助取油样工装包括辅助阀门、辅助取油样管道件和辅助取油样管道件基座,辅助取油样管道件固定在辅助取油样管道件基座上,辅助阀门连接辅助取油样管道件,所述油管开闭阀门的出口接入辅助取油样管道件。
11.优选的,所述机械手爪单元包括手爪基座和设置在手爪基座两侧的第一机械爪和
第二机械爪,所述第一机械爪和第二机械爪的抓取部均与所述油样瓶的形状相配合;所述手爪基座的一端设有电磁铁和阀门工装固定柱。
12.优选的,所述第一机械爪和第二机械爪均为机械爪结构,该机械爪结构包括推杆安装基座、电动推杆、手爪摆臂和手爪,所述推杆安装基座固定安装在手爪基座上,所述手爪摆臂的一端转动安装在手爪基座上,所述电动推杆的一端转动连接推杆安装基座,另一端转动连接手爪摆臂,所述手爪固定在手爪摆臂中与电动推杆相对的一端。
13.优选的,所述第一机械爪和第二机械爪均为机械爪结构,该机械爪结构包括推杆安装基座、电动推杆、手爪摆臂和手爪,所述推杆安装基座固定安装在手爪基座上,所述手爪摆臂的一端转动安装在手爪基座上,所述电动推杆的一端转动连接推杆安装基座,另一端转动连接手爪摆臂,所述手爪固定在手爪摆臂中与电动推杆相对的一端。
14.优选的,所述机械手爪单元还包括视觉摄像头,所述视觉摄像头安装在手爪基座上。
15.优选的,所述阀门开闭工装包括阀门开闭工装基板和阀门固定柱,所述阀门开闭工装基板设有与电磁铁相配合的磁吸材料,所述阀门开闭工装基板设有与所述阀门工装固定柱相对应的安装孔,所述阀门固定柱安装在阀门开闭工装基板上,并与阀门中的孔洞分布相配合。
16.优选的,所述取油样辅助组件还包括工装放置台和阀门开闭工装放置台,所述工装放置台固定在智能移动组件上,所述阀门开闭工装放置台固定在工装放置台上。
17.优选的,所述油样瓶包括清洗油样瓶和采集油样瓶。
18.优选的,所述阀门开闭工装放置台包括永磁体和放置基座。
19.优选的,所述辅助取油样平台组件还包括采集油样瓶放置台、辅助取油样工装基板和永磁铁,所述辅助取油管道件基座固定在辅助取油样工装基板上,所述永磁铁固定在辅助取油样工装基板的背面。
20.优选的,所述辅助取油管道件基座的安装位置,保证辅助取油管道件的出油口在放置在采集油样瓶放置台上的采集油样瓶的瓶口正上方。
21.优选的,所述固定在辅助取油样工装基板上的永磁铁的数量为多个。
22.与现有技术相比,本发明具有以下优点:
23.(1)本发明通过阀门开闭工装和辅助取油样工装实现变压器油管道的阀门开闭,进行油样的采集,辅助取油样工装结构简单,且方便维修,动作灵活,实现了取油样作业的通用性,具有更高的经济效益;
24.(2)本方案设计的辅助取油样平台组件使油样采集机器人能够适应各种场景的油样采集,具有更高的经济效益。
25.(3)本方案设计的油样采集机器人能够替代作业人员进入危险区域取油,保障了人员的生命安全。
附图说明
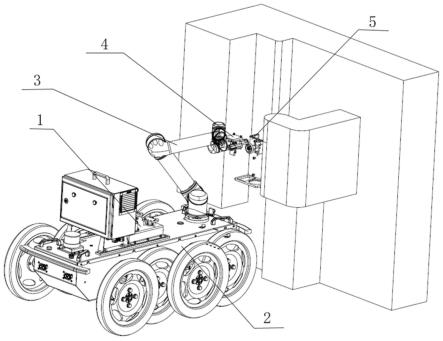
26.图1为本发明提供的结构示意图;
27.图2为本发明提供的取油样辅助组件的结构示意图;
28.图3为本发明提供的大阀门开闭工装的结构示意图;
29.图4为本发明提供的大阀门开闭工装放置台的结构示意图;
30.图5为本发明提供的小阀门开闭工装的结构示意图;
31.图6为本发明提供的小阀门开闭工装放置台的结构示意图;
32.图7为本发明提供的机械手的主视图;
33.图8为本发明提供的机械手的俯视图;
34.图9为本发明提供的机械手爪单元的主视图;
35.图10为本发明提供的机械手爪单元的右视图;
36.图11为本发明提供的机械手爪单元的俯视图;
37.图12为本发明提供的辅助取油样平台组件的结构示意图;
38.图13为本发明提供的辅助取油样工装的主视图;
39.图14为本发明提供的辅助取油样工装的左视图;
40.图15为本发明提供的机械手爪抓取采集油样瓶时的状态示意图;
41.图16为本发明提供的视觉摄像头对大阀门状态进行识别的示意图;
42.图17为本发明提供的视觉摄像头对小阀门状态进行识别的示意图;
43.图18为本发明提供的一种变电站取油样机器人放置取样油瓶时的示意图;
44.图19为本发明提供的一种变电站取油样机器人放置好采集油样瓶后的状态示意图;
45.图20为本发明提供的一种变电站取油样机器人抓取大阀门开闭工装时的状态示意图;
46.图21为本发明提供的机械手驱动机械手爪打开大阀门时的状态示意图;
47.图22为本发明提供的机械手抓取完成油样收集后的采集油样瓶的状态示意图;
48.图23为本发明提供的将采集油样瓶中收集的油样倒入清洗油样瓶的状态示意图;
49.图中,1、取油样辅助工装平台,2、智能移动组件,3、机械手本体,4、机械手爪单元,5、辅助取油样工装组件,101、清洗油样瓶,102、采集油样瓶,103小阀门开闭工装,104、小阀门开闭工装放置台,105、大阀门开闭工装,106、大阀门开闭工装放置台,107、工装放置台,702、固定柱,703、阀门开闭工装基板,601、大阀门开闭工装放置基座,602、第一永磁体,401、小阀门开闭工装放置基座,402、第二永磁体,51、辅助取油样工装,52、油管道,53、大阀门,501、小阀门,502、辅助取油样管道件,503、辅助取油管道件基座,504、辅助取油样工装基板,505、采集取油瓶放置台,506、第三永磁铁,301、视觉摄像头,302、手抓基座,303、手爪转接板,304、第一旋转销钉,305、电磁铁,306、阀门工装固定柱,307、推杆安装基座,308、电动推杆,309、第二旋转销钉,310、手爪摆臂,311、手爪。
具体实施方式
50.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
51.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通
技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
53.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
54.需要说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
55.此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
56.实施例1
57.如图1所示,本实施例提供了一种变电站取油样机器人,包括智能移动组件2、机械手抓取组件、取油样辅助组件1和辅助取油样平台组件5;
58.机械手抓取组件包括机械手本体3和机械手爪单元4,机械手爪单元4安装在机械手本体3的一端,机械手本体的另一端安装固定在智能移动组件2上;
59.所述取油样辅助组件1包括油样瓶和阀门开闭工装,所述机械手爪单元4设有与油样瓶相配合的第一抓取部以及与阀门开闭工装相配合的第二抓取部;
60.所述取油样平台组件5包括连接油管道52的辅助取油样工装,所述油管道设有油管开闭阀门53,所述辅助取油样工装包括辅助阀门501、辅助取油样管道件502和辅助取油样管道件基座503,辅助取油样管道件502固定在辅助取油样管道件基座503上,辅助阀门501连接辅助取油样管道件502,所述油管开闭阀门53的出口接入辅助取油样管道件502。
61.工作原理:需要进行油样采集时,首先通过远程遥控智能移动组件2移动到指定的位置区域,紧接着,驱动机械手本体3到油样瓶的位置,通过机械手爪单元4抓取油样瓶,驱动机械手本体3移动到辅助取油样管道件502的出油口下方,并放置油样瓶;
62.驱动机械手本体3移动到阀门开闭工装的位置,通过机械手爪单元4抓取阀门开闭工装并固定,通过机械手爪单元4上的视觉摄像头确定油管开闭阀门53和辅助阀门501的位置,机械手本体3驱动机械手爪单元4通过阀门开闭工装带动阀门旋转,依次打开油管开闭阀门53和辅助阀门501,油样瓶进行油样采集;
63.油样采集完成后,机械手本体3驱动机械手爪单元4通过阀门开闭工装带动阀门向相反的旋转,依次关闭辅助阀门501和油管开闭阀门53,机械手爪单元4将阀门开闭工装放置到指定位置,机械手爪单元4抓取完成油样采集的油样瓶,将油样瓶放置到指定位置,机器人完成本次油样采集作业。
64.本方案提供的变电站油样采集机器人通过机械手、取油样辅助组件和辅助取油样
工装有利于取油样高效化和自动化,而且辅助取油样工装结构巧妙、维修方便,大大提高了取油样的经济效益。
65.作为一种可选的实施方式,如图2-14所示,机械手爪单元4包括手爪基座302和设置在手爪基座两侧的第一机械爪和第二机械爪,第一机械爪和第二机械爪的抓取部均与所述油样瓶的形状相配合;手爪基座302的一端设有电磁铁305和阀门工装固定柱306,手爪基座302与电磁铁305相对的一侧设有手爪转接板303,用于连接机械手本体3。
66.第一机械爪和第二机械爪均为机械爪结构,该机械爪结构包括推杆安装基座307、电动推杆308、手爪摆臂310和手爪311,推杆安装基座固定安装在手爪基座302上,手爪摆臂310的一端转动安装在手爪基座302上,电动推杆308的一端转动连接推杆安装基座307,另一端转动连接手爪摆臂310,手爪311固定在手爪摆臂310中与电动推杆308相对的一端。
67.上述转动连接的方式采用现有的转动连接结构即可,本实施例中均采用旋转销钉的方式实现,如手爪摆臂310可通过第二旋转销钉309安装在手爪基座302上,电动推杆308的一端通过第一旋转销钉304连接推杆安装基座307。
68.机械手爪单元4中的视觉摄像头301安装在手爪基座302的一侧,实现对辅助阀门501和油管开闭阀门53的位置的识别与确定。
69.取油样辅助组件1还包括工装放置台107和阀门开闭工装放置台,所述工装放置台107固定在智能移动组件2上,所述阀门开闭工装放置台固定在工装放置台107上。
70.工装放置台107上放置有清洗油样瓶101和采集油样瓶102,为了保证收集油样的干净,将第一遍收集到的油样倒入清洗油样瓶101中,用采集油样瓶102收集第二遍的油样。
71.阀门开闭工装放置台包括大阀门开闭工装放置台106和小阀门开闭工装放置台104,其中,大阀门开闭工装放置台106包括第一永磁铁602和大阀门开闭工装放置基座601,第一永磁铁602固定在大阀门开闭工装放置基座601的底部;小阀门开闭工装放置台104包括第二永磁铁402和小阀门开闭工装放置基座401,第二永磁铁402也固定在大阀门开闭工装放置基座401的底部。
72.考虑到阀门开闭工装上会固定磁吸材料,阀门开闭工装放置台固定有永磁铁,保证阀门开闭工装能够稳定的固定在工装放置台107上。
73.阀门开闭工装包括阀门开闭工装基板703和阀门固定柱702,所述阀门开闭工装基板703设有与电磁铁305相配合的磁吸材料,所述阀门开闭工装基板703设有与所述阀门工装固定柱306相对应的安装孔701,所述阀门固定柱702安装在阀门开闭工装基板703上,并与阀门中的孔洞分布相配合。
74.现有技术中的阀门一般设有三个通孔,因此本实施例中阀门固定柱的数量为三个,阀门固定柱的数量可根据阀门中通孔的数量进行对应设置,三个阀门固定柱的分布形式和间距与阀门的大小相配合,在本实施例中设置有大阀门开闭工装105和小阀门开闭工装103。
75.辅助取油样平台组件51还包括采集油样瓶放置台505、辅助取油样工装基板504和永磁铁506,所述辅助取油管道件基座503固定在辅助取油样工装基板504上,所述永磁铁固定在辅助取油管道件基座的背面。
76.上述固定在辅助取油样工装基板上的永磁铁的数量为多个。
77.工作步骤:
78.1、如图12所示,取油样机器人在被远程控制移动到取油样的位置后,通过机械手爪单元4抓取采集油样瓶102,将其放置在采集油样瓶放置台505上。
79.2、如图13-18所示,放置好采集油样瓶102后,机械手抓单元4抓取大阀门开闭工装106,机械手爪单元4中视觉摄像头识别并确认油管开闭阀门53的位置和状态,机械手本体3移动至油管开闭阀门53位置,将大阀门开闭工装106的固定柱702插入油管开闭阀门53的孔隙中,驱动机械手爪单元4带动油管开闭阀门53旋转,实现油管开闭阀门53的打开;和打开油管开闭阀门53相同的方法,利用小阀门开闭工装103打开辅助阀门501,采集油样瓶102开始收集油样。
80.3、如图19-20所示,油样收集完成后,驱动小阀门开闭工装103关闭辅助阀门501;将采集油样瓶102收集的油样倒入清洗油样瓶101中,再将采集油样瓶102放置到采集油样瓶放置台505上,重复第2步。
81.4、采集油样瓶102收集完成后,驱动小阀门开闭工装103关闭辅助阀门501,辅助阀门501关闭后,将小阀门开闭工装103放置在小阀门开闭工装放置台104上,机械手爪单元4抓取采集油样瓶102放置到工装放置台107的指定位置上,机械手恢复至初始状态,远程控制取油样机器人返回,完成整个取油样任务。
82.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
