1.本发明属于动态载荷识别领域,尤其涉及一种基于多项式结构选择的电磁时空耦合载荷识别方法和装置。
背景技术:
2.近年来,风电装机规模日益增加,风机的安全运行和状态监测的研究成为风电装备发展的重要研究内容。风力发电机的受载状态是风电装备状态监测的重要监测指标,准确获得其电磁载荷以保证风力发电机运行状态是必不可缺的环节。由于制造时的质量偏心,安装过程中的不当操作、铁心叠材料等使定子和转子的气膜间隙基本上都是不均匀的,故障将会引起气隙磁场畸变,产生不同于正常运行时的气隙电磁力波作用在转子上,受风速、磁场参数及形状误差等因素的影响,在不同位置,定转子之间的气模间隙不同,从而电磁力的大小与空间位置有关,识别其空间函数可了解定转子之间的气模间隙分布情况,评估电机的运行状况。电磁力主要由动静偏心所引起,不随时间变化的径向电磁力为常量不引起定子振动。即风力发电机所受电磁载荷存在着随时间的推进幅值不断变化的与空间位置、时间有关的时空耦合载荷。常见的时空耦合载荷识别方法是将无限个载荷点的分布载荷转化到有限个集中载荷点处理,时间历程用各节点集中动态载荷来识别,物理响应的测试噪声会引起时间历程函数识别过程的不适定性;空间函数通过基函数拟合,拟合时会出现与空间函数弱相关的项,而弱相关的基函数项引起空间分布函数求解的不适定性。物理响应的测试噪声和弱相关的基函数项等产生的不适定性都会引起电磁时空耦合载荷误差过大,造成求解精度不高。
技术实现要素:
3.本发明要解决的技术问题是,提供一种基于多项式结构选择的电磁时空耦合载荷识别方法和装置,提高时空耦合载荷识别的稳定性和求解精度。
4.为实现上述目的,本发明采用如下的技术方案:
5.一种基于多项式结构选择的电磁时空耦合载荷识别方法,包括以下步骤:
6.步骤s1、获得测量点的位移响应;
7.步骤s2、通过所述位移点测试响应进行时域载荷识别,得到载荷点的有效集中时域载荷;
8.步骤s3、根据有效集中时域载荷,得到有效的模态振型矩阵;
9.步骤s4、根据所述有效模态振型矩阵,得到有效的电磁模态载荷,并且以指定阶数模态载荷作为等效时间历程;
10.步骤s5、其他阶数模态载荷与所述指定阶数模态载荷进行对比得到比值;
11.步骤s6、通过所述比值选择有效的切比雪夫正交多项式;
12.步骤s7、根据有效的切比雪夫正交多项式,得到空间函数;
13.步骤s8、通过所述等效时间历程和空间函数,得到电磁时空耦合载荷。
14.作为优选,步骤s3中,基于误差减小比率的多项式结构选择有效的模态振型矩阵。
15.作为优选,步骤s6中,通过比值基于误差减小比率的多项式结构选择有效的切比雪夫正交多项式。
16.作为优选,步骤s8中,得到电磁时空耦合载荷为:
[0017][0018]
其中,s(t)为时间历程,f(z)为空间函数,ri为切比雪夫正交多项式,ai为切比雪夫正交多项式系数,f(e,t)为电磁时空耦合载荷,e 为气模间隙,m为切比雪夫正交多项式的项数。
[0019]
本发明还提供一种基于多项式结构选择的电磁时空耦合载荷识别装置,包括:
[0020]
获取模块,用于获得测量点的位移响应;
[0021]
识别模块,用于通过所述位移点测试响应进行时域载荷识别,得到载荷点的有效集中时域载荷;
[0022]
第一计算模块,用于根据有效集中时域载荷,得到有效的模态振型矩阵;
[0023]
第二计算模块,用于根据所述有效模态振型矩阵,得到有效的电磁模态载荷,并且以指定阶数模态载荷作为等效时间历程;
[0024]
对比模块,用于将其他阶数模态载荷与所述指定阶数模态载荷进行对比得到比值;
[0025]
选择模块,用于通过所述比值选择有效的切比雪夫正交多项式;
[0026]
第三计算模块,用于根据有效的切比雪夫正交多项式,得到空间函数;
[0027]
第四计算模块,用于通过所述等效时间历程和空间函数,得到电磁时空耦合载荷。
[0028]
作为优选,所述第一计算模块基于误差减小比率的多项式结构选择有效的模态振型矩阵。
[0029]
作为优选,所述选择模块通过比值基于误差减小比率的多项式结构选择有效的切比雪夫正交多项式。
[0030]
作为优选,所述第四计算模块通过如下计算公式得到电磁时空耦合载荷,
[0031][0032]
其中,s(t)为时间历程,f(z)为空间函数,ri为切比雪夫正交多项式,ai为切比雪夫正交多项式系数,f(e,t)为电磁时空耦合载荷,e 为气模间隙,m为切比雪夫正交多项式的项数。
[0033]
本发明针对电磁时空耦合载荷识别过程中物理响应的测试噪声和弱相关的基函数项引起的求解不适定性,运用多项式结构选择技术选择出有效模态振型矩阵,剔除弱相关的基函数项来改善时间历程及空间函数的不适定性,提高噪声因素影响下的电磁时空耦合载荷识别精度和稳定性。
附图说明
[0034]
为了更清楚地说明本发明的技术方案,下面对实施例中所需要使用的附图作简单
地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0035]
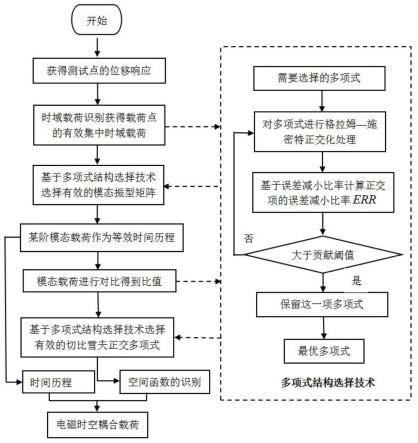
图1为本发明实施例基于多项式结构选择的电磁时空耦合载荷识别方法的流程图;
[0036]
图2为转子系统模型的示意图;
[0037]
图3为测试点的位移响应的示意图;
[0038]
图4为载荷节点上的等效集中时间载荷的示意图;
[0039]
图5为识别的时间历程的示意图;
[0040]
图6为识别的空间函数的示意图;
[0041]
图7为识别的电磁时空耦合载荷的示意图;
[0042]
图8为多项式选择和无多项式选择的识别误差对比的示意图;
[0043]
图9为不同噪声水平识别的误差的示意图。
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0046]
实施例1:
[0047]
电磁载荷由动静偏心所引起,不随时间变化的径向电磁力为常量不引起定子振动。随时间变化的电磁力将激发定子1-4倍于转子机械频率的振动。电磁载荷与时间和空间均有关,需要用时间维度和空间维度的变量共同来表示。其空间分布主要与定转子之间的气模间隙有关,即电磁载荷f(e,t)中的气模间隙e与风力发电机转子所在轴向位置有关,在空间上呈现连续分布性,不同位置的载荷大小不一样;其时间分布主要与转子机械频率相关,在时间上呈现动态性,随时间变化而变化。其时间历程与空间函数是相互独立。对于时空独立的电磁时空耦合载荷,可以表示为如下空间函数与时间历程的乘积形式:
[0048]
f(e,t)=e(z)l(t)
ꢀꢀꢀ
(1)
[0049]
其中,e(z)为电磁时空耦合载荷的空间函数,z为轴向位置,l(t)为电磁时空耦合载荷的时间历程。
[0050]
依据各阶数模态载荷的时间历程与外载荷时间历程具有相同的形式,可知每个载荷节点上的模态载荷与电磁时空耦合载荷中的时间历程具有相同的形式,只是在幅值上差一个系数。如用指定阶数模态载荷p
d(i)
(t)代替其时间历程l(t),则式(1)的电磁时空耦合载荷可改写为:
[0051][0052]
其中,指定阶数模态载荷s(t)=p
d(i)
(t)=cil(t),空间函数在其载荷作用空间可
用m项切比雪夫正交多项式的基底函数进行逼近,ri为第i项切比雪夫正交多项式。ai为相应基底函数前的系数。
[0053]
则电磁时空耦合载荷的识别转化为指定阶数模态载荷s(t)的识别和对应空间函数展开系数ai的确定。将各项基底函数等效到n个载荷节点上。电磁时空耦合载荷等效到n个载荷作用点上,其等效载荷如下所示:
[0054][0055]
其中,fn为等效到第n个载荷作用点上的等效载荷;r
mn
为第m 项切比雪夫正交多项式等效到第n个载荷节点上的等效幅值系数。切比雪夫正交多项式为已知函数,将其等效到n个载荷节点上,通过有限元方法中载荷等效到节点上的方法可以获得一系列的等效幅值系数r
ij
(为第i项切比雪夫正交多项式在第j个载荷作用点上的等效幅值系数);am是第m项切比雪夫正交多项式前的系数。
[0056]
根据fd(e,t)=φ
t
f(e,t)的模态关系,n个载荷节点上的电磁载荷fi与相应的模态载荷f
id
关系为:
[0057]
或
[0058]
其中,ψ为从风力发电机模态振型矩阵φ中提取的与等效载荷作用节点相关联的局部模态振型矩阵,为第o阶局部模态振型矩阵。每个等效载荷作用节点相关联的局部模态振型有很多阶,对选择出
o#
阶模态阶数,可以得到新的模态振型矩阵将新的模态振型矩阵ψ
*
带入式(4)可得相应的模态载荷f
id
。λj为j个载荷节点上的模态载荷与指定阶数模态载荷s(t)的比值。由式(4)可知电磁时空耦合载荷的时间历程用模态载荷f
id
来等效,其识别精度与所选取的模态振型矩阵相关。
[0059]
对比(3)和(4)式,可得:
[0060]
或
[0061]
只要识别出各载荷节点的模态载荷,相应基函数前的系数ai可通过式(5)求解。则空间函数可通过有限载荷节点利用m项切比雪夫正交多项式进行拟合重建,其拟合精度与等效幅值系数ri相关。
[0062]
如图1所示,本发明提供一种基于多项式结构选择的电磁时空耦合载荷识别方法,包括以下步骤:
[0063]
步骤s1、获得测量点的位移响应;
[0064]
步骤s2、通过所述位移点测试响应进行时域载荷识别,获得载荷点的有效集中时域载荷;
[0065]
步骤s3、根据有效集中时域载荷,得到有效的模态振型矩阵;
[0066]
步骤s4、根据所述有效模态振型矩阵,得到有效的电磁模态载荷,并且以指定阶数模态载荷作为等效时间历程;
[0067]
步骤s5、其他阶数模态载荷与所述指定阶数模态载荷进行对比得到比值;
[0068]
步骤s6、通过所述比值选择有效的切比雪夫正交多项式;
[0069]
步骤s7、根据有效的切比雪夫正交多项式,得到空间函数;
[0070]
步骤s8、通过所述等效时间历程和空间函数,得到电磁时空耦合载荷。
[0071]
作为本发明实施例的一种实施方式,步骤s3中,基于误差减小比率的多项式结构选择技术选择有效的模态振型矩阵。
[0072]
应用多项式结构选择技术对式(4)局部模态振型矩阵中选择有效的模态振型矩阵,φo(j)通过格拉姆—施密特正交化变化为wo(j),φo(j)为模态振型矩阵的列向量。根据多项式结构选择技术的原理,可得模态振型矩阵的选择判别式erro为式(6):
[0073][0074]
其中,n为载荷作用点的个数;o=1,2,
…
,b;o
#
=0,...,b-1;b为选择前模态总阶数。
[0075]
作为本发明实施例的一种实施方式,步骤s6中,通过比值λj基于误差减小比率的多项式结构选择技术选择有效的切比雪夫正交多项式ri。
[0076]
对式(5)中的等效幅值系数ri进行选择,ri(j)通过格拉姆—施密特正交化变化为vi(j),ri(j)为等效幅值系数ri的列向量。根据多项式结构选择技术的原理,可得对于空间分布函数的切比雪夫正交多项式的选择判别式erri为如下公式:
[0077][0078]
其中,n为载荷作用点的个数;i=1,2,...,m;i
#
=0,...,m-1。
[0079]
作为本发明实施例的一种实施方式,步骤s7中,通过选择出的有效的切比雪夫正交多项式ri,识别出切比雪夫正交多项式系数ai,获得空间函数f(z)。
[0080]
作为本发明实施例的一种实施方式,步骤s8中,通过时间历程 s(t)和空间函数f(z)获得电磁时空耦合载荷为:
[0081][0082]
本发明引入多项式结构选择技术改进电磁载荷识别,通过误差减小比率基本原理计算出每一项的贡献率,剔除贡献率小的项,改善识别过程中的不适定性。提高时空耦合载荷识别的稳定性和求解精度,可有效准确识别出风力发电机的电磁时空耦合载荷,保证风机系统乃至整个风电机组的安全和高效运行。
[0083]
本发明实施例具有以下有益效果:
[0084]
1)本发明实施例基于多项结构式选择技术通过识别的有限点集中载荷选择有效的模态振型矩阵,克服由物理响应的测试噪声引起的求解不适定性,提高时间历程的识别精度。多项式结构选择技术选择有效的模态振型矩阵,减小噪声对模态载荷的影响,提高电磁时空耦合载荷的时间历程的识别精度。
[0085]
2)本发明实施例基于多项式结构选择技术剔除切比雪夫正交多项式的弱相关项,改善问题的不适定性,提高空间函数拟合的稳定性。通过对切比雪夫正交多项式进行选择优化,剔除微小项对基函数前的系数ai的影响,提高电磁时空耦合载荷的空间函数的求解的精度和稳定性。
[0086]
通过如下算例(如图2、表1)验证本发明方法的正确性和有效性。先以仿真计算得到的理想位移来检验本发明方法的正确性,再以注入随机噪声来检验本发明方法的鲁棒性。基于测试的位移响应识别风力发电机的电磁载荷。
[0087]
表1
[0088][0089]
电机在第1和第2圆盘中间,电磁载荷沿轴段335mm到495mm分布。时间与空间相互独立的电磁载荷作用于风电转子表面,假定其空间函数和时间历程分别为:
[0090]
e(z)=(z-3)(z-2),z∈[335,495]mm, l(t)=3sin(60πt) 2sin(90πt),t∈[0,0.1]s。通过瞬态位移仿真获得位移节点1,2,5,28,30的5个位移响应为图3所示:
[0091]
采用如下6项切比雪夫正交多项式对空间函数进行拟合。
[0092][0093]
对于空间函数的区间不是[-1,1]的问题,任意作用区间[z0,z1]可通过坐标系统变换到[-1,1]。将各项切比雪夫正交多项式离散到12-16这5个载荷节点上。即在四个轴段区域[335,375], [375,415],[415,455],[455,495]将相应的各项切比雪夫正交多项式等效到各区域端点(载荷节点12,13,14,15,16)上。通过载荷等效节点法得等效幅值系数r
ij
如下表2所示:
[0094]
表2
[0095][0096]
1无噪声位移的电磁载荷识别
[0097]
基于无噪声位移响应识别出5个载荷节点上的等效集中时间载荷,如图4所示,与时间历程不具有相同的形式,不能等效替代电磁时空耦合载荷的时间历程。对如图2中转子
模型共划分34个节点,有136阶模态,通过多项式结构选择技术选出5阶有效模态,分别为第39、80、81、105、117阶。如图5所示,通过式(3)获得5个载荷节点上的模态载荷,以真实的时间历程与第1个载荷节点的模态载荷相对比,只差一个幅值,即c2为-0.1992,将各幅值与对应的模态载荷相乘,结果与电磁时空耦合载荷的真实时间历程高度吻合。各个载荷节点的模态载荷与电磁时空耦合载荷中的时间历程具有相同的形式,只是在幅值上差一个系数,如表3的第二行所示。
[0098]
提取5个载荷节点的模态载荷与第1个载荷节点的模态载荷的比值为:λ1=1,λ2=-0.3080,λ3=-5.1930,λ4=-1.0654,λ5=-10.7412。通过比值λi基于误差减小比率的多项式结构选择技术对6项切比雪夫正交多项式选出第1项和第3项为有效项。根据式(5)识别切比雪夫正交多项式系数a1=-0.0993,a2=0,a3=-0.1001,a4=0,a5=0, a6=0。将各系数与对应的基函数相乘拟合电磁时空耦合载荷的空间函数,并与真实的空间函数进行对比如图6所示,可知实际的电磁时空耦合载荷的空间函数与拟合的空间函数差一个幅值,其幅值的倒数也为-0.1992。由图6识别的空间函数可以看出通过多项式结构选择技术比无多项式结构选择技术的空间函数可以更好的跟真实空间函数吻合,其空间函数的拟合精度更高。
[0099]
将识别的和真实的电磁时空耦合载荷及误差对比如图7、8所示。整体来说误差很小,识别结果与真实电磁时空耦合载荷吻合程度很高。识别参量与原始参量的评价指标显示如表4的中第二行,时间函数的最小相关系数为1,空间函数的最小相关系数为1;电磁时空耦合载荷的最小相关系数为1,最大整体相对误差为0.86%。无多项式结构选择识别出的时间历程的最小相关系数为1,空间函数的最小相关系数为0.9979;电磁时空耦合载荷的最小相关系数为0.9989,最大整体相对误差为4.87%。从图7可看出基于多项式结构选择技术识别的时空耦合载荷和真实的时空耦合载荷之间的误差在-0.04n与0.03n 之间波动,其识别误差比无多项式结构选择呈现的-0.2n与0.2n之间波动更小,识别精度得到提升。该方法提高了时间历程和空间函数的识别精度,其最大整体相对误差的精度足足提升了4.01%。
[0100]
2有噪声位移的电磁载荷识别
[0101]
表3
[0102][0103]
表4
[0104][0105]
为检验本发明方法对测量噪声的鲁棒性。加入不同的噪声水平来模拟实验测量的位移响应。在三种噪声下电磁时空耦合载荷的识别过程参数及评价指标如表3和表4中第三行至第五行:通过给5个测试点的位移加入3%、5%、10%的随机噪声,检验该方法的鲁棒性。识别参量与原始参量的评价指标显示,时间历程的最小相关系数分别为 0.9998、0.9998、0.9999,空间函数的最小相关系数分别为1、1、 0.9947。通过图9可以看出,在3%、5%、10%的随机噪声水平下识别的时空耦合载荷的绝对误差都在合理的区间波动。其电磁时空耦合载荷的最小相关系数分别为0.9998、0.9998、0.9971,最大整体相对误差分别为2.23%、2.17%、8.01%。这些指标参数直观有力地证明了基于多项式结构选择技术改进的时空耦合载荷识别方法具有较好的鲁棒性。
[0106]
实施例2:
[0107]
本发明还提供一种基于多项式结构选择的电磁时空耦合载荷识别装置,包括:
[0108]
获取模块,用于获得测量点的位移响应;
[0109]
识别模块,用于通过所述位移点测试响应进行时域载荷识别,得到载荷点的有效集中时域载荷;
[0110]
第一计算模块,用于根据有效集中时域载荷,得到有效的模态振型矩阵;
[0111]
第二计算模块,用于根据所述有效模态振型矩阵,得到有效的电磁模态载荷,并且以指定阶数模态载荷作为等效时间历程;
[0112]
对比模块,用于将其他阶数模态载荷与所述指定阶数模态载荷进行对比得到比值;
[0113]
选择模块,用于通过所述比值选择有效的切比雪夫正交多项式;
[0114]
第三计算模块,用于根据有效的切比雪夫正交多项式,得到空间函数;
[0115]
第四计算模块,用于通过所述等效时间历程和空间函数,得到电磁时空耦合载荷。
[0116]
作为本发明实施例的一种实施方式,所述第一计算模块基于误差减小比率的多项式结构选择有效的模态振型矩阵。
[0117]
作为本发明实施例的一种实施方式,所述选择模块通过比值基于误差减小比率的多项式结构选择有效的切比雪夫正交多项式。
[0118]
作为本发明实施例的一种实施方式,所述第四计算模块通过如下计算公式得到电磁时空耦合载荷,
[0119]
[0120]
其中,s(t)为时间历程,f(z)为空间函数,ri为切比雪夫正交多项式,ai为切比雪夫正交多项式系数,f(e,t)为电磁时空耦合载荷,e 为气模间隙,m为切比雪夫正交多项式的项数。
[0121]
以上所述的实施例仅是对本发明优选方式进行的描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。