1.本发明实施例涉及光学检测技术,尤其涉及一种激光轮廓检测装置及检测方法。
背景技术:
2.光谱中,波长0.75μm至1000μm的光线称为红外线,通常分为近红外、中红外、远红外三个部分,对应波长分别为0.75μm~3.0μm、3μm~20μm和20μm~1000μm。其中,中远红外波段在遥感、探测、医疗和生物成像领域中均具有重要的应用价值,因其具有高亮度、良好相干性和极高空间分辨率的特点,在诸如激光定向红外干扰、激光通讯、红外测距、大气测风速、温度、生物成像等领域已获得广泛应用。
3.激光光束特性是激光器的重要指标,而对于中远红外激光光束的分析,一般用狭缝二维扫描的方式来测量光斑轮廓,但现有的检测装置存在的共同问题:小功率无法测量,小尺度高精度的狭缝制作难度大,以及两个维度的运动自由度和狭缝占用空间体积较大,难以实现商业化生产。
技术实现要素:
4.本发明实施例提供一种激光轮廓检测装置及检测方法,以实现可以兼容大尺寸、中远红外、大长宽比的光斑轮廓测量。
5.第一方面,本发明实施例提供一种激光轮廓检测装置,用于检测光束生成模块输出的激光光束的二维轮廓分布,所述激光轮廓检测装置包括矩孔模块、能量探测器、移动模块以及处理模块;
6.所述矩孔模块设置于所述光束生成模块的光输出端,所述矩孔模块包括一矩形通光孔;
7.所述能量探测器设置于所述矩形通光孔的出光侧,用于探测所述矩形通光孔透射光的光强;
8.所述移动模块与所述光束生成模块和/或所述矩孔模块连接,用于带动所述光束生成模块和/或所述矩孔模块移动,以使所述矩形通光孔依次透过所述激光光束各个位置的光线;
9.所述处理模块与所述能量探测器电连接,用于根据所述能量探测器接收的信号得出所述激光光束的二维轮廓分布。
10.可选的,所述矩孔模块包括一遮光平板,所述矩形通光孔位于所述遮光平板的中心;
11.所述移动模块用于带动所述光束生成模块和/或所述矩孔模块沿第一方向以第一距离s1依次平移,或者带动所述光束生成模块和/或所述矩孔模块沿第二方向以第二距离s2依次平移;
12.所述第一方向和所述第二方向垂直,且所述第一方向和所述第二方向均平行于所述遮光平板所在平面。
13.可选的,s1≠s2。
14.可选的,所述矩形通光孔的长边与所述第一方向平行,且所述矩形通光孔的长边长度为l1,l1=n
×
s1;
15.当所述光束生成模块和所述矩孔模块的相对运动方向沿所述第一方向,所述矩形通光孔的长边与所述激光光束的交叠长度小于或等于l1时,第k次移动时所述能量探测器获取的光强为i_pdk,第k 1次移动时所述能量探测器获取的光强为i_pd
k 1
,则第k 1次移动对应光斑的光强为i
k 1
=i_pd
k 1-i_pdk;
16.当所述矩形通光孔的长边与所述激光光束的交叠长度大于l1时,第m次移动对应光斑的光强为im=i_pd
m-i_pd
m-1
i
m-n 1
;或者,
17.所述矩形通光孔的长边与所述第二方向平行,且所述矩形通光孔的长边长度为l2,l2=n
×
s2;
18.当所述光束生成模块和所述矩孔模块的相对运动方向沿所述第二方向,所述矩形通光孔的长边与所述激光光束的交叠长度小于或等于l2时,第k次移动时所述能量探测器获取的光强为i_pdk,第k 1次移动时所述能量探测器获取的光强为i_pd
k 1
,则第k 1次移动对应光斑的光强为i
k 1
=i_pd
k 1-i_pdk;
19.当所述矩形通光孔的长边与所述激光光束的交叠长度大于l2时,第m次移动对应光斑的光强为im=i_pd
m-i_pd
m-1
i
m-n 1
;
20.其中,n为大于1的整数,k为正整数,m为大于n的整数。
21.可选的,所述矩形通光孔的短边与所述第一方向平行,且所述矩形通光孔的短边长度为s1;
22.当所述光束生成模块和所述矩孔模块的相对运动方向沿所述第一方向时,第k次移动时所述能量探测器获取的光强为ik=i_pdk;或者,
23.所述矩形通光孔的短边与所述第二方向平行,且所述矩形通光孔的短边长度为s2;
24.当所述光束生成模块和所述矩孔模块的相对运动方向沿所述第二方向时,第k次移动时所述能量探测器获取的光强为ik=i_pdk;
25.其中,k为正整数。
26.可选的,所述移动模块用于带动所述光束生成模块和/或所述矩孔模块沿第一方向以第一速度平移,或者带动所述光束生成模块和/或所述矩孔模块沿第二方向以第二速度平移;
27.所述能量探测器以第一采样频率探测所述矩形通光孔透射光的光强;
28.所述第一方向和所述第二方向垂直,且所述第一方向和所述第二方向均平行于所述遮光平板所在平面。
29.可选的,所述矩孔模块包括一圆筒形遮光结构,所述矩形通光孔位于所述圆筒形遮光结构的侧壁,所述能量探测器位于所述圆筒形遮光结构内;
30.所述移动模块用于带动所述圆筒形遮光结构绕中心轴旋转。
31.可选的,所述光束生成模块输出的激光光束为红外光束。
32.可选的,所述能量探测器包括光电式探测器或热电式探测器。
33.可选的,所述矩形通光孔的面积大于所述激光光束的光斑面积。
34.第二方面,本发明实施例还提供一种激光轮廓检测方法,采用上述的激光轮廓检测装置执行,包括:
35.光束生成模块输出待测的激光光束;
36.能量探测器探测矩形通光孔透射光的光强;
37.移动模块带动所述光束生成模块和/或矩孔模块移动,以使所述矩形通光孔依次透过所述激光光束各个位置的光线;
38.处理模块根据所述能量探测器接收的信号得出所述激光光束的二维轮廓分布。
39.本发明实施例提供的激光轮廓检测装置,包括矩孔模块、能量探测器、移动模块以及处理模块;通过在矩孔模块上设置一个矩形通光孔,从而使矩形通光孔至少透射一部分光束;通过能量探测器探测矩形通光孔透射光的光强;通过移动模块带动光束生成模块和/或矩孔模块移动,使光束生成模块和矩孔模块发生相对运动,以实现矩形通光孔对整个光斑的扫描,从而使矩形通光孔依次透过激光光束各个位置的光线;通过处理模块对能量探测器接收的信号进行处理,得出激光光束的二维轮廓分布,以实现可以兼容大尺寸、中远红外、大长宽比的光斑轮廓测量。
附图说明
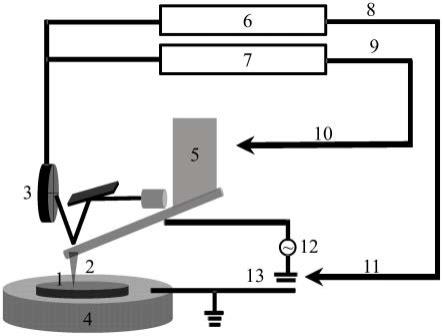
40.图1为本发明实施例提供的一种激光轮廓检测装置的结构示意图;
41.图2和图3分别为本发明实施例提供的一种光斑采样过程中的数据处理算法的示意图;
42.图4和图5分别为本发明实施例提供的另一种光斑采样过程中的数据处理算法的示意图;
43.图6和图7分别为本发明实施例提供的又一种光斑采样过程中的数据处理算法的示意图;
44.图8为本发明实施例提供的一种光斑采样拼接还原仿真结果示意图;
45.图9为本发明实施例提供的另一种激光轮廓检测装置的结构示意图;
46.图10为本发明实施例提供的一种激光轮廓检测方法的流程示意图。
具体实施方式
47.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
48.在本发明实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。需要注意的是,本发明实施例所描述的“上”、“下”、“左”、“右”等方位词是以附图所示的角度来进行描述的,不应理解为对本发明实施例的限定。此外在上下文中,还需要理解的是,当提到一个元件被形成在另一个元件“上”或“下”时,其不仅能够直接形成在另一个元件“上”或者“下”,也可以通过中间元件间接形成在另一元件“上”或者“下”。术语“第一”、“第二”等仅用于描述目的,并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
49.图1为本发明实施例提供的一种激光轮廓检测装置的结构示意图,本实施例提供的激光轮廓检测装置用于检测光束生成模块1输出的激光光束的二维轮廓分布,激光轮廓检测装置包括矩孔模块10、能量探测器20、移动模块30以及处理模块40;矩孔模块10设置于光束生成模块1的光输出端,矩孔模块10包括一矩形通光孔101;能量探测器20设置于矩形通光孔101的出光侧,用于探测矩形通光孔101透射光的光强;移动模块30与光束生成模块1和/或矩孔模块10连接,用于带动光束生成模块1和/或矩孔模块10移动,以使矩形通光孔101依次透过激光光束各个位置的光线(图1示出移动模块30与光束生成模块1和矩孔模块10均连接,带动光束生成模块1沿x方向运动,带动矩孔模块10沿y方向运动仅是示意性的,并不是对本发明实施例的限定,其他实施例中移动模块30可以只连接一个模块,带动该模块沿两个方向移动);处理模块40与能量探测器20电连接,用于根据能量探测器20接收的信号得出激光光束的二维轮廓分布。
50.其中,光束生成模块1可以用于半导体领域各类使用高能激光的设备,例如可以是激光退火设备等,示例性的,由于高能激光设备一般利用红外激光,可选的,光束生成模块1输出的激光光束为红外光束,在其他实施例中,光束生成模块1输出的激光光束可以为其他波段的光束,只需设置匹配的能量探测器20即可。矩孔模块10设置有一个矩形通光孔101,相对于现有技术中要制作透光狭缝,可以降低加工难度,通过控制光束生成模块1和矩孔模块10在两个自由度(x方向和y方向)的相对运动,实现矩形通光孔101对待测激光光束的二维遍历扫描,使每一个x坐标和y坐标对应点的光强均可以被测量,综合所有数据即可以得到光斑的二维轮廓分布,其重复性可以达到微米甚至纳米量级,具有较高的探测精度。各采样位置的光线透过矩形通光孔101后被能量探测器20接收,根据待测光束的能量和波长,可选的,能量探测器20包括光电式探测器或热电式探测器,具体实施时可以根据实际情况选择。由移动模块30带动光束生成模块1和/或矩孔模块10移动实现激光光束和矩形通光孔101的二维遍历后,通过数据处理可以获得每个采样位置点的能量,拼接后即可获得待测光斑的二维轮廓分布。其中,图1中示出的矩形通光孔101的面积小于激光光束的光斑面积只是示意性的,在具体实施时,矩形通光孔101的面积可以小于、等于或大于激光光束的光斑面积,在某一实施例中,可选的,矩形通光孔101的面积大于激光光束的光斑面积,面积较大的矩形通光孔101容易制作,这样可以避免制备宽度非常小的狭缝,从而减小工艺难度,降低激光轮廓检测装置的成本。
51.本实施例的技术方案,通过在矩孔模块上设置一个矩形通光孔,从而使矩形通光孔至少透射一部分光束;通过探测模块探测矩形通光孔透射光的光强;通过移动模块带动光束生成模块和/或矩孔模块移动,使光束生成模块和矩孔模块发生相对运动,以实现矩形通光孔对整个光斑的扫描,从而使矩形通光孔依次透过激光光束各个位置的光线;通过处理模块对能量探测器接收的信号进行处理,得出激光光束的二维轮廓分布,以实现可以兼容大尺寸、中远红外、大长宽比的光斑轮廓测量。
52.在上述技术方案的基础上,可选的,继续参考图1,矩孔模块10包括一遮光平板102,矩形通光孔101位于遮光平板102的中心;移动模块30用于带动光束生成模块1和/或矩孔模块10沿第一方向x以第一距离s1依次平移,或者带动光束生成模块1和/或矩孔模块10沿第二方向y以第二距离s2依次平移(图1中未示出s1和s2的大小);第一方向x和第二方向y垂直,且第一方向x和第二方向y均平行于遮光平板102所在平面。
53.可以理解的是,图1的实施例中,移动模块30带动光束生成模块1沿第一方向x移动,带动矩孔模块10沿第二方向y移动,其中每次光束生成模块1在第一方向x的移动距离为s1,矩孔模块10在第二方向y的移动距离为s2,即s1和s2表示每次移动时矩形通光孔101和光斑的相对移动距离,例如当光束生成模块1和矩孔模块10同时沿第一方向x移动时,可以设置一个沿x正方向移动s1/2,另一个沿x负方向移动s1/2,而不是每个部件都移动s1的距离。通过设置光束生成模块1和矩孔模块10在第一方向x和第二方向y上相对移动,实现矩形通光孔101对光斑的二维遍历,具体实施时,移动模块30可以只带动光束生成模块1移动,也可以只带动矩孔模块10移动,还可以既带动光束生成模块1移动,也带动矩孔模块10移动,具体实施时可以根据实际情况设计。在其他实施例中,必要时移动模块还可以带动能量探测器20移动,以避免使用大面积的探测器,降低成本。
54.可选的,s1≠s2。
55.可以理解的是,在具体实施时,两个自由度的位移互不干涉,因此两个方向运动分辨率可以相同,也可以不同,在某一实施例中,激光光束的光斑形状可以为长条形,此时可以设置s1≠s2,以保证两个方向的测量精度。
56.可选的,矩形通光孔的长边与第一方向平行,且矩形通光孔的长边长度为l1,l1=n
×
s1;当光束生成模块和矩孔模块的相对运动方向沿第一方向,矩形通光孔的长边与激光光束的交叠长度小于或等于l1时,第k次移动时能量探测器获取的光强为i_pdk,第k 1次移动时能量探测器获取的光强为i_pd
k 1
,则第k 1次移动对应光斑的光强为i
k 1
=i_pd
k 1-i_pdk;当矩形通光孔的长边与激光光束的交叠长度大于l1时,第m次移动对应光斑的光强为im=i_pd
m-i_pd
m-1
i
m-n 1
;或者,矩形通光孔的长边与第二方向平行,且矩形通光孔的长边长度为l2,l2=n
×
s2;当光束生成模块和矩孔模块的相对运动方向沿第二方向,矩形通光孔的长边与激光光束的交叠长度小于或等于l2时,第k次移动时能量探测器获取的光强为i_pdk,第k 1次移动时能量探测器获取的光强为i_pd
k 1
,则第k 1次移动对应光斑的光强为i
k 1
=i_pd
k 1-i_pdk;当矩形通光孔的长边与激光光束的交叠长度大于l2时,第m次移动对应光斑的光强为im=i_pd
m-i_pd
m-1
i
m-n 1
;其中,n为大于1的整数,k为正整数,m为大于n的整数。
57.示例性的,图2和图3分别为本发明实施例提供的一种光斑采样过程中的数据处理算法的示意图,参考图2,矩形通光孔101的长边与第一方向x平行,且矩形通光孔101的长边长度为l1,l1=n
×
s1(图2中示意性示出n=4,并不是对本发明实施例的限定);当光束生成模块和矩孔模块的相对运动方向沿第一方向x,矩形通光孔101的长边与激光光束的交叠长度小于或等于l1,即矩形通光孔101未完全进入光斑时,第k次移动时能量探测器获取的光强为i_pdk,第k 1次移动时能量探测器获取的光强为i_pd
k 1
,则第k 1次移动对应光斑的光强为i
k 1
=i_pd
k 1-i_pdk;参考图3,当矩形通光孔101的长边与激光光束的交叠长度大于l1,即矩形通光孔101完全进入光斑时,在第m次移动前的能量i1~i
m-1
均为已知,第m次移动对应光斑的光强为im=i_pd
m-i_pd
m-1
i
m-n 1
;图4和图5分别为本发明实施例提供的另一种光斑采样过程中的数据处理算法的示意图,参考图4,矩形通光孔101的长边与第二方向y平行,且矩形通光孔101的长边长度为l2,l2=n
×
s2(图4中示意性示出n=4,并不是对本发明实施例的限定);当光束生成模块和矩孔模块的相对运动方向沿第二方向y,矩形通光孔101的长边与激光光束的交叠长度小于或等于l2,即矩形通光孔101未完全进入光斑时,第k次移动时能量探测器获取的光强为i_pdk,第k 1次移动时能量探测器获取的光强为i_pd
k 1
,
则第k 1次移动对应光斑的光强为i
k 1
=i_pd
k 1-i_pdk;参考图5,当矩形通光孔101的长边与激光光束的交叠长度大于l2,即矩形通光孔101完全进入光斑时,在第m次移动前的能量i1~i
m-1
均为已知,第m次移动对应光斑的光强为im=i_pd
m-i_pd
m-1
i
m-n 1
;其中,n为大于1的整数,k为正整数,m为大于n的整数。
58.在另一实施例中,光束生成模块和矩孔模块相对运动方向可以与矩形通光孔的短边平行,为了简化,每次移动的距离可以等于短边的距离。示例性的,图6和图7分别为本发明实施例提供的又一种光斑采样过程中的数据处理算法的示意图,参考图6,可选的,矩形通光孔101的短边与第一方向x平行,且矩形通光孔101的短边长度为s1;当光束生成模块和矩孔模块的相对运动方向沿第一方向时,此时矩形通光孔101变为狭缝,单个采样位置探测器接收到的能量即可代表该位置的能量,第k次移动时能量探测器获取的光强为ik=i_pdk;或者,参考图7,矩形通光孔101的短边与第二方向平行,且矩形通光孔101的短边长度为s2;当光束生成模块和矩孔模块的相对运动方向沿第二方向时,第k次移动时能量探测器获取的光强为ik=i_pdk;其中,k为正整数。
59.图8为本发明实施例提供的一种光斑采样拼接还原仿真结果示意图,其中采样间隔δx为37.5μm,由图8可知,还原轮廓中仅丢失高频信号,尺寸和位置还原精度很高,实际光斑长边半高全宽fwhm=11.141mm,短边fwhm=75μm,还原后光斑长边fwhm=11.175mm,短边fwhm=75μm。
60.上述实施例中,光束生成模块和矩孔模块采用步进的方式扫描,其空间采样分辨率又移动步长决定,在另一实施例中,也可以由移速和采样频率共同决定。可选的,移动模块用于带动光束生成模块和/或矩孔模块沿第一方向以第一速度平移,或者带动光束生成模块和/或矩孔模块沿第二方向以第二速度平移;能量探测器以第一采样频率探测矩形通光孔透射光的光强;第一方向和第二方向垂直,且第一方向和第二方向均平行于遮光平板所在平面。具体实施时,光束生成模块和/或矩孔模块的移动速度以及能量探测器的采样频率可以根据实际情况灵活选择。
61.图9为本发明实施例提供的另一种激光轮廓检测装置的结构示意图,参考图9,可选的,矩孔模块10包括一圆筒形遮光结构103,矩形通光孔101位于圆筒形遮光结构103的侧壁,能量探测器20位于圆筒形遮光结构103内;移动模块30用于带动圆筒形遮光结构103绕中心轴旋转。
62.通过降矩孔模块10设计为旋转扫描的形式,有利于减小检测装置的体积。
63.图10为本发明实施例提供的一种激光轮廓检测方法的流程示意图,本实施例提供的激光轮廓检测方法采用上述实施例提供的任意一种激光轮廓检测装置执行,包括:
64.步骤s110、光束生成模块输出待测的激光光束;
65.步骤s120、能量探测器探测矩形通光孔透射光的光强;
66.步骤s130、移动模块带动光束生成模块和/或矩孔模块移动,以使矩形通光孔依次透过激光光束各个位置的光线;
67.步骤s140、处理模块根据能量探测器接收的信号得出激光光束的二维轮廓分布。
68.本实施例的技术方案,通过光束生成模块输出待测的激光光束,通过探测模块探测矩形通光孔透射光的光强;通过移动模块带动光束生成模块和/或矩孔模块移动,使光束生成模块和矩孔模块发生相对运动,以实现矩形通光孔对整个光斑的扫描,从而使矩形通
光孔依次透过激光光束各个位置的光线;通过处理模块对能量探测器接收的信号进行处理,得出激光光束的二维轮廓分布,以实现可以兼容大尺寸、中远红外、大长宽比的光斑轮廓测量。
69.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。