1.本发明涉及传感器设计与整体制备技术领域,特别涉及一种生理化岛连柔性传感器及其制作方法。
背景技术:
2.随着人类社会向工业化、信息化、智能化的不断发展,相关领域对电子技术中的传感器提出了更高的要求,迫切需要具有柔韧、可弯曲、可拉伸的柔性传感技术,以满足可穿戴电子、医疗、机器人工业、航空航天等领域的需求。
3.申请号为cn201520559184.5的中国专利公开了一种集成柔性传感器的智能手环,其包括手环本体、柔性传感器模块、柔性电源、柔性气袋和微型泵;柔性传感器模块包括转换线路层、衬底层、传感层、保护层、连接电极和微型蓝牙;转换线路层设置于柔性气袋的表面,微型泵设置于手环本体内;衬底层设置于转换线路层的表面;传感层设置于衬底层的表面;保护层设置于传感层的表面;转换线路层和传感层之间通过连接电极连接;微型蓝牙与转换线路层相连;柔性电源与柔性传感器模块相连;柔性电源设置于手环本体的内部,柔性传感器模块设置于手环本体的内侧。本专利集成高灵敏度的柔性传感器,能快速实时准确的无创伤检测人体生理健康体征信号。
4.申请号为cn201910210750.4的中国专利公开了一种基于多种柔性传感器的体感服饰。服饰本体上集成有一个或者多个柔性传感器、导电基座以及安装在导电基座上的控制器模块,柔性传感器与控制器模块之间通过柔性导线电性连接。在服饰上增设柔性传感器、控制器模块,可实时获取身体主要部位的尺寸数据以及全面的运动监测数据和人体生理体征信息,另外通过结合其他计算设备和云端服务器,可将用户身体各监测部位的动态数据通过驱动模块中的通信单元实时的传送到各智能终端,并结合软件实现与智能空间、虚拟环境的互动体验,同时通过结合云端的大数据分析和ai算法模型及时给出反馈,为健身者制定个性化的健身解决方案。
5.申请号为cn202023203407.4的中国专利公开了一种基于生理特征的手势识别柔性传感器,其包括柔性基底、传感单元,所述柔性基底粘附在手背,所述传感单元设置在所述柔性基底上用于检测手背肌腱对所述传感单元的压力;通过设置的柔性基底能够适用与不同大小的手背,适用范围较广,通过传感单元能够准确的检测手背上肌腱的运动状态,进而准确的识别手势。将传感单元设置在手背上,距离手指关节较远,对手的运动影响不大,更方便、更舒适。并且在使用时对传感单元的破坏性较小,可重复使用性较高。
6.申请号为cn202111470195.2的中国专利公开了一直可穿戴式健康监测设备及其柔性传感器及制作方法,所述柔性传感器包括:柔性超声换能器,所述柔性超声换能器用于发射超声波,并基于用户反射的超声波,采集超声检测信号,所述超声检测信号用于确定超声影像信息;与所述柔性超声换能器相对固定的柔性电子层,所述柔性电子层背离所述柔性超声换能器的一侧表面用于和用户皮肤贴附,采集生理信号。所述柔性传感器可以通过柔性超声换能器采集超声检测信号,通过柔性电子层采集生理信号,可以实现基于多种诊
断信息的健康监测方案。而且可以将所述柔性超声换能器作为基材,直接在其上形成所述柔性电子层,无需单独的粘合层。
7.上述专利都是基于柔性传感器的生理信号采集系统,均是对人体生理信号的单一采集,所制备的柔性传感的针对性极强,不具备可拓展性。
技术实现要素:
8.为了实现根据本发明的上述目的和其他优点,本发明的第一目的是提供一种生理化岛连柔性传感器,包括:数据功能岛模块、无线传输岛模块、电源控制及数据功能岛模块、岛连模块、启动开关模块、充电模块、柔性外壳;
9.所述数据功能岛模块、无线传输岛模块、电源控制及数据功能岛模块、岛连模块、启动开关模块、充电模块置于所述柔性外壳内;
10.所述数据功能岛模块内设有若干生理参数采集岛,所述生理参数采集岛用于采集生理参数;
11.所述启动开关模块与所述无线传输岛模块连接;
12.所述数据功能岛模块通过所述岛连模块与所述无线传输岛模块连接;
13.所述无线传输岛模块通过所述岛连模块与所述电源控制及数据功能岛模块连接;
14.所述电源控制及数据功能岛模块与所述充电模块连接;
15.所述启动开关模块用于开启或关闭所述生理化岛连柔性传感器;
16.所述无线传输岛模块用于与外部终端连接,并将所述数据功能岛模块采集的生理参数传输至所述电源控制及数据功能岛模块。
17.进一步地,所述电源控制及数据功能岛模块包括电源管理模块和皮电采集数据岛,所述电源管理模块用于给所述生理化岛连柔性传感器供电,所述皮电采集数据岛用于通过皮电数据分析人体的精神情绪状态。
18.进一步地,所述岛连模块为类蛇形结构。
19.进一步地,所述生理参数采集岛包括运动数据采集岛、心电数据采集岛、肌电数据采集岛、呼吸数据采集岛,所述运动数据采集岛用于采集运动数据,所述心电数据采集岛用于采集心电数据,所述肌电数据采集岛用于采集肌电数据,所述呼吸数据采集岛用于采集呼吸数据,所述运动数据采集岛、所述心电数据采集岛、所述肌电数据采集岛、所述呼吸数据采集岛通过所述岛连模块与所述无线传输岛模块连接。
20.进一步地,所述柔性外壳包括底部柔性外壳和顶部柔性外壳。
21.本发明的第二目的是提供一种生理化岛连柔性传感器的制作方法,包括以下步骤:
22.利用底壳模具制作柔性传感器的底部柔性外壳;
23.将柔性传感器中各模块按照形状放入所述底壳模具上的底部柔性外壳内,利用底部外壳柔性的粘性将柔性传感器进行固定;
24.利用顶壳模具制作柔性传感器的顶部柔性外壳;
25.通过顶壳模具上的标定模块将固定有柔性传感器的底壳模具固定在顶壳模具上。
26.进一步地,所述利用底壳模具制作柔性传感器的底部柔性外壳包括以下步骤:
27.将ecoflex00-30的a型胶和ecoflex00-30的b型胶进行一比一混合,搅拌均匀之后
放入蓝色的铂金固化硅胶着色剂,再次搅拌均匀,然后将其放入真空机中进行抽真空处理,最后将抽真空后的混合液的倒入底壳模具,进行静止凝固,最终成形成稳定的底部柔性外壳。
28.进一步地,所述利用顶壳模具制作柔性传感器的顶部柔性外壳包括以下步骤:
29.将ecoflex00-30的a型胶和ecoflex00-30的b型胶进行一比一混合,搅拌均匀之后放入白色的铂金固化硅胶着色剂,再次搅拌均匀,然后将其放入真空机中进行抽真空处理,最后将抽真空后的混合液倒入顶壳模具。
30.进一步地,所述利用底壳模具制作柔性传感器的底部柔性外壳步骤中,抽真空处理的时间为5分钟,静止凝固的时间为两小时。
31.进一步地,所述利用顶壳模具制作柔性传感器的顶部柔性外壳步骤中,抽真空处理的时间为10分钟。
32.与现有技术相比,本发明的有益效果是:
33.本发明提供了一种生理化岛连柔性传感器及其制作方法,通过对传感器的电路进行岛连的模块化设计,并为其设计出个性化的外壳模型,实现能够直接实用化的贴合人体皮肤的柔性传感器,实现对人体的健康生理参数的实时采集。
34.本发明采用岛型设计,将不同功能模块设计成柔性岛形,各个模块利用类蛇形线进行连接,使得各个模块之间互相不受到机械干扰,拥有更强的模块独立性,岛形的设计使得柔性传感器打破尺寸的限制,各个岛形拥有自己的最小尺寸,通过类蛇形线进行相互连接,使得传感器即使整体尺寸较大,也能够拥有最小的功能岛区,使之更加容易贴合人体皮肤,能够最大限度的发挥柔性传感器的拉伸和弯曲性能。岛形的设计可以依据不同场景下进行变形,如根据一些自然生物外形所设计的岛形造型均包括在该岛形里面。同时类蛇形的连接线不仅可以是带弧度的矩形,还可以是圆弧形。
35.本发明通过设计不同纵高的岛封装,适配柔性传感不同岛区的关键封装。
36.本发明采用多个柔性传感中的生理信号采集功能岛区的设计,能够根据实际使用情况选取针对性的生理信号采集柔性电路进行类蛇形线连接,能够实现个性化柔性传感器的快速制备组装,实现更多场景下的生理柔性传感器的快速应用。
37.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
附图说明
38.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
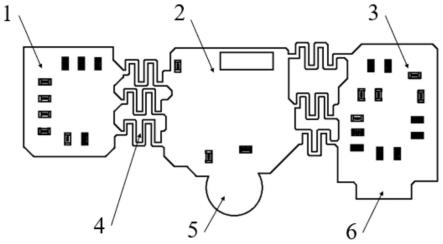
39.图1为实施例1的生理化岛连柔性传感器内部模块示意图;
40.图2为实施例1的底壳模具示意图一;
41.图3为实施例1的底壳模具示意图二;
42.图4为实施例1的顶壳模具外部示意图;
43.图5为实施例1的顶壳模具内部示意图;
44.图6为实施例1的柔性传感器内部模块连接示意图;
45.图7为实施例2的生理化岛连柔性传感器的制作方法流程图。
46.附图中:1、数据功能岛模块;2、无线传输岛模块;3、电源控制及数据功能岛模块;4、岛连模块;5、启动开关模块;6、充电模块;7、顶壳模具; 71、标定模块;72、电源模块;73、无线模块;74、功能模块;8、底壳模具。
具体实施方式
47.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
48.实施例1
49.一种生理化岛连柔性传感器,如图1所示,包括:数据功能岛模块1、无线传输岛模块2、电源控制及数据功能岛模块3、岛连模块4、启动开关模块5、充电模块6、柔性外壳;
50.数据功能岛模块1、无线传输岛模块2、电源控制及数据功能岛模块3、岛连模块4、启动开关模块5、充电模块6置于柔性外壳内;启动开关模块5 与无线传输岛模块2连接;数据功能岛模块1通过岛连模块4与无线传输岛模块2连接;无线传输岛模块2通过岛连模块4与电源控制及数据功能岛模块3连接;电源控制及数据功能岛模块3与充电模块6连接;充电模块6位于电源控制及数据功能岛模块3的下方,将电源管理和充电放在一个岛上,符合电路设计规范。本实施例中,充电模块6设计成平面模式,方便探针按压式充电的使用。
51.数据功能岛模块1内设有若干生理参数采集岛,生理参数采集岛用于采集生理参数;数据功能岛模块1中的功能模块74采用自由组合的形式,可以根据人体的需要进行个性化的功能定制。以运动数据为例,将运动数据的电路转印到该传感器的数据功能岛模块1中,并通过岛连模块4与无线传输岛模块2连接,并受其控制。
52.启动开关模块5用于开启或关闭生理化岛连柔性传感器;启动开关模块 5位于无线传输岛模块2的下方,呈圆形,具有一定的美观性,同时也方便触摸。
53.无线传输岛模块2用于通过岛连模块4与数据功能岛模块1进行数据的有线传输,将数据功能岛模块1采集的生理参数传输至电源控制及数据功能岛模块3,以及与外部终端连接,将来自数据功能岛模块1中的数据通过蓝牙无线传输到手机端或者电脑端。
54.无线传输岛模块2可以根据自身的生理数据形式,借助蓝牙底层代码定制不同的数据格式,实现个性化的数据传输。
55.电源控制及数据功能岛模块3包括电源管理模块和皮电采集数据岛,电源管理模块用于给生理化岛连柔性传感器供电,实现整体传感器稳定的能量供给,皮电采集数据岛用于通过皮电数据分析人体的精神情绪状态。
56.岛连模块4为类蛇形结构,能够更加方便不同岛区之间的相对运动,比如拉伸、弯曲、折叠等,从而实现更加柔性化的传感器性能。类蛇形的连接线不仅可以是带弧度的矩形,还可以是圆弧形。其中,数据功能岛模块1属于该类皮肤传感器的功能区。如图6所示,生理参数采集岛包括运动数据采集岛、心电数据采集岛、肌电数据采集岛、呼吸数据采集岛,运动数据采集岛用于采集运动数据,心电数据采集岛用于采集心电数据,肌电数据采集岛用于采集肌电数据,呼吸数据采集岛用于采集呼吸数据,能够实现基本的人体生理参数数据的采集获取。运动数据采集岛、心电数据采集岛、肌电数据采集岛、呼吸数据采集岛通过
岛连模块4与无线传输岛模块2连接。
57.为了保证整体传感器的大小尺寸问题和贴附人体的舒适性,将各个模块设计成岛的形式,并通过岛连模块4进行连接,从而可以更加灵活方便的取舍各个功能区,实现传感器的个性设计和灵活制备,同时整体大小尺寸控制也更加方便。
58.柔性外壳包括底部柔性外壳和顶部柔性外壳。顶壳模具7和底壳模具8 用于制作整体传感器的外壳。如图2、图3所示,底壳模具8用于制作柔性传感器的底部柔性外壳;如图4、图5所示,顶壳模具7用于制作柔性传感器的顶部柔性外壳。顶壳模具7包括标定模块71,以及用于实际封装的电源模块72、无线模块73和功能模块74。标定模块71由四个固定尺寸的方形块组成,其所组成的长宽尺寸与底壳模具8的长和宽相匹配,用于顶壳模具7 和底壳模具8的相互固定。电源模块72用于封装电源控制及数据功能岛模块 3,其弧型凹槽在匹配电源和柔性线路板的同时具有柔性美观性。无线模块 73用于封装无线传输岛模块2,功能模块74用于封装数据功能岛模块1。
59.生理化岛连柔性传感器设计以岛形设计为基准,将不同的生理参数采集功能以岛的形式区分开,可以实现不同柔性传感的快速制备。同时岛形的连接很大程度上放大了柔性传感器本身的拉伸和弯曲性能。
60.生理化岛连柔性传感器的使用流程为:首先确认使用环境和使用功能,并将对应的功能模块74(运动数据采集岛、心电数据采集岛、肌电数据采集岛、呼吸数据采集岛)设计到数据功能岛模块1中,与预先设计好的无线传输岛模块2和电源控制及数据功能岛模块3形成完整的生理化岛连柔性传感器的柔性电路板设计,接着借助顶壳模具7和底壳模具8设计个性化的柔性传感外壳。待制作完成,将传感器贴附到人体上。通过对启动开关模块5的按压触发,打开生理化岛连柔性传感器,通过无线传输岛模块2与电脑端进行蓝牙连接,并开始进行生理参数的采集和实时传输,待数据采集完成之后,从电脑端进行蓝牙断开,并通过对启动开关模块5的按压触发来关闭生理化岛连柔性传感器。
61.现有的柔性传感器均是实现单一功能的一种载体,其特异性比较高,使用前景比较受限制,灵活度不强。本发明打破了这些限制,在不损耗柔性传感器的特有性能(可拉伸、可弯曲)的前提下实现了个性化功能化柔性传感器的快速制备,这使得生理化柔性传感器可以更方便的实现制备。
62.实施例2
63.一种生理化岛连柔性传感器的制作方法,如图7所示,包括以下步骤:
64.利用底壳模具8制作柔性传感器的底部柔性外壳;首先将ecoflex00-30 的a型胶和ecoflex00-30的b型胶进行一比一混合,搅拌均匀之后放入蓝色的铂金固化硅胶着色剂,再次搅拌均匀,然后将其放入真空机中进行5分钟的抽真空处理,最后将抽真空后的混合液的倒入底壳模具8,进行两小时的静止凝固,最终成形成稳定的底部柔性外壳。
65.将柔性传感器中各模块按照形状放入底壳模具8上的底部柔性外壳内,利用底部外壳柔性的粘性将柔性传感器进行固定;
66.利用顶壳模具7制作柔性传感器的顶部柔性外壳;首先将ecoflex00-30 的a型胶和ecoflex00-30的b型胶进行一比一混合,搅拌均匀之后放入白色的铂金固化硅胶着色剂,再次搅拌均匀,然后将其放入真空机中进行10分钟的抽真空处理,最后将抽真空后的混合液倒入顶壳模具7。
67.通过顶壳模具7上的标定模块71将固定有柔性传感器的底壳模具8固定在顶壳模具7上,从而实现柔性传感器的完全封装。此封装方式不仅可以将柔性传感器的器件完全封装进硅胶中对其进行保护,同时完全封装可以形成一个完整的整体,增强传感器的拉伸和弯曲性能。
68.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、商品或者设备中还存在另外的相同要素。
69.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
70.以上仅为本说明书实施例而已,并不用于限制本说明书一个或多个实施例。对于本领域技术人员来说,本说明书一个或多个实施例可以有各种更改和变换。凡在本说明书一个或多个实施例的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本说明书一个或多个实施例的权利要求范围之内。本说明书一个或多个实施例本说明书一个或多个实施例本说明书一个或多个实施例本说明书一个或多个实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
