1.本发明涉及形状测量系统以及形状测量方法。
背景技术:
2.在专利文献1中记载有自动地对电梯升降路内的尺寸进行测量来降低作业人员的劳力的升降路内测量系统。在专利文献1所记载的升降路内测量系统中,具有设置于电梯的升降路的顶板或上部的构造物且朝向最下部照射激光的基准激光装置、具有对升降路内的水平方向的尺寸进行测量的平面测量装置的移动测量装置、以及设置于升降路的顶板或上部的构造物且使移动测量装置升降的移动装置,移动测量装置具有对从基准激光装置照射出的激光进行检测的基准激光检测装置、以及检测自身的姿势的姿势检测装置。
3.利用对从基准激光装置照射出的激光进行检测的基准激光检测装置,掌握了移动测量装置的升降路内的三维坐标(位置)。在基准激光装置与移动测量装置之间的距离较大的情况下,由于激光随着该距离的大小而扩散,所以通过将光束压缩器等设置在基准激光检测装置的上部,使扩散的激光会聚。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2020-59568号公报
技术实现要素:
7.发明所要解决的课题
8.移动测量装置由作为移动装置使用的卷扬装置的绳索悬挂,通过由卷扬装置卷起或送出绳索,来使移动测量装置在升降路内上下升降移动。因此,若由绳索悬挂的移动测量装置摆动,则有测量装置的测量精度变差的课题。
9.用于解决课题的方案
10.本发明的第一方案的形状测量系统具备:基准光源部,其向预定的方向射出光束;距离测量部,其对在与上述光束的光束光轴垂直的面内的到测量对象的距离进行测量;位置检测部,其设于上述距离测量部,接受上述光束来对上述距离测量部相对于上述光束光轴的相对位置信息进行检测;移动机构,其使上述距离测量部以及上述位置检测部一体地沿上述光束光轴移动;以及运算部,其基于由上述距离测量部测量出的距离信息和由上述位置检测部检测出的上述相对位置信息来计算上述测量对象的三维形状,上述位置检测部具备:检测光学系统,其供上述基准光源部的光束射入;以及位置检测传感器,其配置于比上述检测光学系统的焦点面离上述检测光学系统更近的位置,经由上述检测光学系统接受上述基准光源部的光束,并输出受光位置作为上述相对位置信息。
11.本发明的第二方案的形状测量方法是上述方案的形状测量系统的形状测量方法,在与上述修正数据建立了对应的距离的范围内设定一个以上的停止位置,使上述距离测量部以及上述位置检测部停止在所设定的各个停止位置,使上述基准光源部沿与上述光束光
轴垂直的方向移动预定量,基于移动上述预定量前后的上述受光位置的变化量和上述预定量来校正上述修正数据,代替上述修正数据而根据校正后的修正数据对上述受光位置进行修正并计算上述光束射入位置,基于计算出的光束射入位置来计算上述三维形状。
12.发明的效果如下。
13.根据本发明,即使在产生了振动等的情况下,也能够进行高精度的形状测量。
附图说明
14.图1是示出本发明的形状测量系统的一个实施方式的图。
15.图2是示出位置测量部的主要部分的示意图。
16.图3是示出检测光学系统的结构的另一例的图。
17.图4是示出基准光源部的概要的示意图。
18.图5是说明相对于光束光轴的位置偏移的图。
19.图6是示出形状测量系统的功能框图的一例的图。
20.图7是说明射入位置与受光位置的关系的图。
21.图8是示出运算部的运算处理顺序的一例的流程图。
22.图9是用于说明校正处理的一例的流程图。
23.图10是示出变形例2的图。
24.图11是说明偏摆方向的旋转偏移的图。
25.图中:
26.1—形状测量系统,2—基准光源部,3—距离测量部,4—位置检测部,4a—第一检测部,4b—第二检测部,5—移动机构,6—数据处理部,7、44—通信机,22—光束整形光学系统,23—准直光学系统,24—倾斜调整部,25—位置调整部,31—测距传感器,32—旋转工作台,41、41a、41b—位置检测传感器,42、42a、42b—检测光学系统,43—倾斜角传感器,46—焦点面,61—运算部,62—存储部,100—电梯升降路,200—光束,210—光束光轴,420—球面透镜,421—非球面透镜。
具体实施方式
27.以下,参照附图对本发明的实施方式进行说明。以下的记载以及附图是用于说明本发明的示例,为了使说明变得清楚,适当地进行了省略及简略。本发明也能够以其它各种方式来实施。为了容易理解发明,在附图中示出的各构成要素的位置、大小、形状、范围等有时不表示实际的位置、大小、形状、范围等。因此,本发明不一定限定于在附图中公开的位置、大小、形状、范围等。
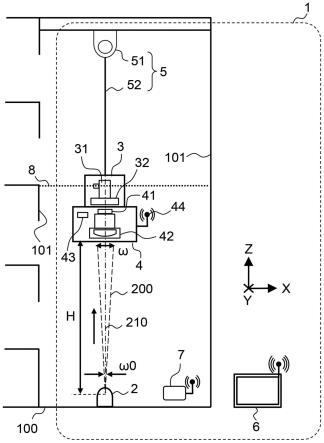
28.图1是示出本发明的形状测量系统的一个实施方式的图,且是示出进行电梯升降路的三维形状测量的形状测量系统1的简要结构的示意图。在新设电梯时,首先,进行决定电梯安装工程整个过程中的基准位置的作业。为此,需要进行电梯升降路100的形状测量,使用形状测量系统1进行电梯升降路100的三维形状测量。形状测量系统1具备基准光源部2、距离测量部3、位置检测部4、移动机构5、数据处理部6以及通信机7。
29.在进行电梯升降路100的形状测量的距离测量部3内置有激光位移计等测距传感器31,对到升降路内壁101的距离进行测量。测距传感器31被放置在旋转工作台32之上。旋
转工作台32设定为旋转工作台32的旋转轴与设于位置检测部4的检测光学系统42的光轴一致。通过使旋转工作台32旋转一圈,测距传感器31能够对升降路内壁101的遍及与垂直于铅垂方向的面8交叉的位置的360度整个区域的形状进行测量。从下述的设于位置检测部4的通信机44经由配置在电梯升降路100内的通信机7向设于升降路外的数据处理部6发送距离测量部3的测量数据。
30.距离测量部3通过移动机构5能够沿电梯升降路100的铅垂方向移动。移动机构5具备固定于电梯升降路100的上部的绞盘51、以及由绞盘51卷起或送出的绳索52。由于电梯升降路100的测量作业在新设电梯前进行,所以在电梯升降路100内完全未安装轿厢轨道等构造物。因此,通过在电梯升降路100的上部设置绞盘51,由绞盘51卷起或送出绳索52,来使距离测量部3上下升降移动。
31.在距离测量部3的下部设有位置检测部4,若由移动机构5使距离测量部3升降移动,则位置检测部4也与距离测量部3一体地升降移动。在电梯升降路100的下部配置有基准光源部2。基准光源部2设置为设置位置处于绞盘51的铅垂方向的正下方。基准光源部2朝向铅垂方向的绞盘51射出光束200。基准光源部2的详细内容如下。
32.位置检测部4是测定升降移动的距离测量部3的相对位置数据的装置。位置检测部4具备位置检测传感器41、检测光学系统42、倾斜角传感器43以及通信机44。配置于绞盘51的正下方的基准光源部2的光束200从基准光源部2向铅垂上方射出,并向位置检测部4的检测光学系统42射入。由检测光学系统42会聚的光束200由位置检测传感器41接受。位置检测传感器41例如使用psd(position sensitive detector:位置探测器)等。倾斜角传感器43是测量与距离测量部3设为一体的位置检测部4的倾斜、即距离测量部3的倾斜的传感器。
33.基准光源部2射出光束200,该光束200刚射出之后的光束直径为ω0。光束200在刚射出之后光束直径最小,之后因衍射的影响而光束直径扩大。图1中,当将基准光源部2与检测光学系统42的铅垂方向距离设为h时,将从基准光源部2离开距离h的位置处的光束直径设为ω。点划线所示的线210是将光束直径ω0的光束光点的中心与光束直径ω的光束光点的中心连接的线。以下,将线210称为光束200的光束光轴210。在由绳索52悬挂的距离测量部3以及位置检测部4处于静止状态的情况下,光束光轴210与检测光学系统42的光轴一致。
34.从通信机44发送位置检测传感器41及倾斜角传感器43的相对位置数据和距离测量部3的测量数据。从通信机44发送出的相对位置数据以及测量数据经由配置在电梯升降路100内的通信机7向设于升降路外的数据处理部6发送。数据处理部6例如由个人电脑之类的计算机构成。数据处理部6基于来自位置检测部4的相对位置数据对测量数据进行处理,将其转换成电梯升降路100的三维形状测量数据。此外,在图1所示的例子中,虽然通过无线通信向数据处理部6发送数据,但也可以是通过有线通信来发送的结构。
35.图2是示出图1所示的位置检测部4的主要部分的示意图。设于位置检测部4的位置检测传感器41以及检测光学系统42固定于镜筒45而成为一体。检测光学系统42具备两片球面透镜420。射入至检测光学系统42的光束200由两片球面透镜420会聚,并由位置检测传感器41接受。符号46所示的面是具有焦点距离f的检测光学系统42的焦点面。位置检测传感器41配置于比检测光学系统42的焦点面46离检测光学系统42更近的位置。即,从检测光学系统42到位置检测传感器41的距离设定为比检测光学系统42的焦点距离f小。此外,球面透镜420也可以设有三片以上。
36.如在图1中所说明,刚射出之后的光束直径最小时的光束直径为ω0的光束200因衍射的影响,在沿铅垂方从基准光源部2离开相当于距离h的检测光学系统42的位置处的光束直径扩大至ω(>ω0)。当将光束200的波长设为λ时,距离h处的光束200的光束直径ω由下式(1)表示。
37.ω=h
×
tan(λ/πω0)
……
(1)
38.当将检测光学系统42的开口直径设为d时,开口直径d需要比将要射入的光束200的光束直径ω大。因此,检测光学系统42的开口直径d所需要的条件式由下式(2)表示。
39.d>h
×
tan(λ/πω0)
……
(2)
40.例如,在光束200使用普通的红色激光(λ=650nm,ω0=0.5mm)的情况下,式(2)如下式(3)表示。其中,开口直径d是由mm表示时的值,距离h是由m表示时的值。
41.d(mm)>h(m)
×
0.4
……
(3)
42.在通过移动机构5使距离测量部3以及位置检测部4在电梯升降路100内从铅垂方向的下端移动至上端的情况下,式(2)或(3)的条件在任何高度都需要成立。因此,在将上端的距离h表示为hmax的情况下,开口直径d需要满足在式(2)或(3)中由hmax置换h后的算式。在本实施方式中,检测光学系统42的开口直径d设定为相对于距离h满足式(2)或(3)。其结果,即使光束200因衍射的影响而扩大,在距离测量部3以及位置检测部4的整个升降范围,光束200整体也可靠地射入至检测光学系统42而由位置检测传感器41接受。
43.此外,在使用波长比红色激光(λ=650nm,ω0=0.5mm)的波长短的光束200的情况下,式(2)的tan(λ/πω0)的值比式(3)中的0.4小。即,在使用波长λ≤650nm的光束200的情况下,换言之,在不使用波长比λ=650nm长的光束200的范围内,若满足式(3)的条件,则可以说光束200整体可靠地射入至检测光学系统42。
44.图3是示出检测光学系统42的结构的另一例的图。在图3所示的例子中,通过将检测光学系统42的结构设为一片非球面透镜421,从而降低在透镜周边部产生的像差的影响,提高了位置检测精度。与图2的情况相同,位置检测传感器41配置于比检测光学系统42的焦点面46离检测光学系统42更近的位置。此外,也可以使用两片以上的非球面透镜421来构成。
45.图4是示出基准光源部2的概要的示意图。图4的z轴方向是铅垂方向,x轴及y轴是水平面内的坐标轴。从基准光源部2的发光部21射出光束200。刚射出之后的光束200的光束光点形状(光束截面形状)呈椭圆形,但由光束整形光学系统22修正成大致圆形的光束光点形状。另外,光束200由准直光学系统23大致准直成平行光。若由位置检测传感器41接受的光束光点形状变形成椭圆,则位置检测精度变差,但通过由光束整形光学系统22修正成大致圆形,来提高位置检测精度。除此之外,通过由准直光学系统23将光束200大致准直成平行光,能够抑制光束200的几何光学的扩大,从而能够抑制位置检测传感器41的受光面中的光束光点的照射区域的扩大。
46.另外,基准光源部2具备调整光束光轴210的倾斜的倾斜调整部24和调整光束光轴210的水平方向位置的位置调整部25。倾斜调整部24通过变更自身的倾斜,能够将光束200的射出方向调整为铅垂上方(z轴正方向)。在图4所示的例子中,通过使设于支撑部件240的底面的多个螺纹件241旋转,来调整光束光轴210的倾斜。作为另一例,考虑万向接头方式的结构,例如,通过电动驱动对光轴的倾斜进行自动控制,由此即使在基准光源部2因外部干
扰等而产生振动之类的情况下,也能够向铅垂方向照射光束200。
47.倾斜调整部24被载置在位置调整部25的xy工作台250上。xy工作台250构成为能够沿x方向及y方向在基座251上移动。xy工作台250的驱动方法可以是电动驱动或手动驱动中任一种。通过xy工作台250的移动,能够在将光束光轴210维持为铅垂方向的状态下变更光束光轴210的xy位置。
48.在电梯升降路100内的形状测量作业中,遍及升降路延长方向的长距离要求高精度的形状测量。例如,在未设置位置检测部4而仅由距离测量部3进行形状测量的情况下,在被绳索52悬挂的距离测量部3摆动时,测量误差增加,从而有测量精度变差的问题。为了实现高精度测量,需要对测量数据中的、在距离测量部3摆动时距离测量部3的位置从静止状态位置偏移的影响进行修正。因此,在本实施方式的形状测量系统1中,具备用于检测距离测量部3相对于光束光轴210的相对位置的位置检测部4。由位置检测部4检测自身相对于光束光轴210的相对位置,并基于该相对位置信息由数据处理部6进行测量数据的修正处理。
49.图5是示出距离测量部3以及位置检测部4因摆动而位置从光束光轴210偏移的情况的图。此外,图5中,为了容易理解,将摆动的大小描绘为比实际大,因此虽然光束光轴210从检测光学系统42偏移,但实际上在摆动较小的状态下进行形状测量动作。在距离测量部3以及位置检测部4摆动时,如图5所示,距离测量部3以及位置检测部4整体的位置不仅在水平方向偏移,距离测量部3以及位置检测部4整体还产生倾斜。图5的d1是检测光学系统42的光轴位置相对于光束光轴210在水平方向上的位置偏移量,即,表示检测光学系统42中的光束200的射入位置。
50.如上所述,旋转工作台32的旋转轴设定为与设于位置检测部4的检测光学系统42的光轴一致。因此,测距传感器31对与铅垂方向垂直的面8内的到升降路内壁101的距离进行检测。即,距离测量部3对以旋转工作台32的旋转轴为基准的距离、即以检测光学系统42的光轴为基准的距离进行测量。如图5所示,若距离测量部3以及位置检测部4产生倾斜偏移以及位移偏移,则不能正确地测量应测量的距离。因此,通过基于位置检测部4所检测出的相对位置数据对测量数据中的倾斜偏移以及位移偏移的影响进行修正处理,来进行正确的三维形状测量。
51.另外,位置检测传感器41的受光面中的光束200的光束光点具有某程度的扩大,而以下将与光束光轴210对应的位置设为受光位置。而且,受光面中的光束光点的移动量由受光面中的光束光轴210的移动量即受光位置的移动量表示。并且,如图1所示,在位置检测部4静止在光束光轴210上的状态下,受光位置位于受光面的原点。
52.在图1所示的静止状态下,即使位置检测部4仅倾斜,受光面中的受光位置也变化,并且即使位置检测部4不倾斜而仅在水平方向上产生位置偏移,受光面中的受光位置也变化。在图5所示的情况下,受光位置的变化包括由位置检测部4的倾斜引起的位置变化和由位置检测部4的水平方向的位置偏移引起的位置变化。以下,将位置检测部4的倾斜称为倾斜偏移,将位置检测部4的水平方向的位置偏移称为位移偏移。
53.位置检测部4的倾斜偏移以及位移偏移与受光面中的受光位置的变化量的关系在倾斜偏移和位移偏移的情况下不同。位置检测传感器41离检测光学系统42越近,则伴随倾斜偏移产生的受光位置的变化量越小。另一方面,若位置检测传感器41配置于焦点面46(参照图2)附近,则伴随位移偏移产生的受光位置的变化量变小,随着从焦点面46向检测光学
系统42侧或其相反侧远离,伴随位移偏移产生的受光位置的变化量变大。
54.在位置检测部4中,位置检测部4的倾斜即倾斜偏移由倾斜角传感器43检测,位置检测部4的位移偏移由位置检测传感器41检测。位置检测传感器41的检测信号优选针对光束光轴210相对于检测光学系统42的光轴的位置偏移而示出线形的响应。但是,若受光面中的受光位置的变化较小,则相对于光束光轴210的位置偏移的检测信号的线形性变差,从而难以正确地检测光束光轴210的位置偏移。并且,若位置检测传感器41配置于离检测光学系统42的焦点面46较远的位置,则由倾斜偏移引起的光束光点的移动量增加,光束光点从位置检测传感器41偏移,从而难以进行正常的信号检测。
55.因而,在本实施方式中,如图2、图3所示,将位置检测传感器41配置于比检测光学系统42的焦点面46离检测光学系统42更近的位置。由此,受光位置变化中的位移偏移的贡献变大而倾斜偏移的贡献变小,能够改进检测信号的线形性。并且,由于受光位置变化中的倾斜偏移的贡献变小,所以能够防止光束光点因倾斜偏移的影响而从受光面偏移的情况。其结果,能够提高对位置检测部4的倾斜偏移以及位移偏移的鲁棒性,提高位置检测精度。
56.此外,若使位置检测传感器41过于接近检测光学系统42侧,则位置检测传感器41上的光点尺寸变大,从而当距离测量部3以及位置检测部4摆动时,光束光点的一部分从位置检测传感器12偏移,难以进行正常的信号检测。因此,在位置检测传感器41且在检测光学系统42与焦点面46之间存在最适当的位置。根据光学模拟,可知通过将位置检测传感器41配置为从焦点面46向检测光学系统42接近相当于检测光学系统42的焦点距离f的10%~15%左右的距离,从而能够适当地抑制光点尺寸的增大,从而能够进行良好的信号检测。例如,在检测光学系统42的焦点距离为83mm的情况下,从焦点面46到位置检测传感器41的距离为8.3mm~12.5mm。
57.图6是示出形状测量系统1的功能框图的一例的图。如上所述,设于位置检测部4的通信机44将由距离测量部3获取到的测量数据和由位置检测部获取到的相对位置数据作为测量信号而向通信机7发送。经由通信机7向数据处理部6发送测量信号。相对位置数据包括位置检测传感器41的受光位置数据和倾斜角传感器43的倾斜角数据。通过设为像这样经由通信机7向数据处理部6发送测量信号的结构,通信机44能够采用电力消耗较少的短距离通信。当然,也可以不经由通信机7而直接从通信机44向数据处理部6发送测量信号。
58.移动机构5的绞盘51具备检测移动量hm的旋转编码器等。向数据处理部6发送由移动机构5检测出的移动量hm。此外,也可以构成为在位置检测部4设置激光测距仪等对位置检测部4与升降路底部的距离进行测量,来代替由移动机构5检测移动量hm。数据处理部6具备由cpu等构成的运算部61和由ram、rom等存储器、硬盘、cd-rom等记录介质构成的存储部62。运算部61通过执行存储部62所储存的数据处理程序,来进行将测量数据转换成对象物的三维形状测量数据的处理等。
59.另外,位置检测传感器41所使用的psd是能够求解所接受到的光束光点的光量的重心位置的传感器。该重心位置相当于受光位置。在数据处理部6的运算部61中,基于所得到的受光位置和由倾斜角传感器43检测出的倾斜角来求解距离测量部3的位置(xy位置以及倾斜),并基于该位置来修正测量数据,从而成为正确的三维形状测量用的数据。
60.图7是说明检测光学系统42中的光束200的射入位置与受光面中的受光位置的关系的图。此处,假定为受光位置相对于射入位置呈线形的响应,以射入位置与受光位置的相
关关系由直线表示的情况为例进行说明。此外,将相关关系称为修正系数线。图7中,横轴的射入位置表示检测光学系统42离光轴的距离,纵轴的受光位置表示受光面离原点位置的距离。
61.修正系数线l1示出检测光学系统42离基准光源部2的距离为h1的情况下的修正系数线。在受光位置为d0的情况下,射入位置为d1。该射入位置d1是图2所示的检测光学系统42的光轴相对于光束光轴210的位置偏移量。在修正系数线l1由直线表示的情况下,即在呈线形的响应的情况下,当将修正系数线l1与横轴的角度设为β时,射入位置d1由d1=d0/tanβ计算。1/tanβ是用于将受光位置d0修正成射入位置d1的修正系数。
62.如图1所示,光束200因衍射的影响,在从基准光源部2离开距离h的位置具有光束直径ω的扩大。这样,在光束200扩大的情况下,受光面中的光束光点的光量的重心位置根据光束直径ω的大小而不同。即,即使检测光学系统42中的光束200的射入位置相同,受光面中的光束光点的光量的重心位置也根据距离h而不同。图7中,修正系数线l2表示距离h2的情况,修正系数线l3表示距离h3的情况。此处,h3>h2>h1。即,即使由位置检测传感器41检测的受光位置为相同的d0,使用修正系数线计算出的射入位置在距离h1的情况下为d1,在距离h2的情况下为d2,在距离h3的情况下为d3。
63.在存储部62中预先存储有与距离h对应的多个修正系数线所相关的修正系数数据。运算部61基于从移动机构5输入的移动量hm来计算距离h。运算部61选择与根据多个修正系数线计算出的距离h对应的修正数线,并基于所选择的修正系数线和检测出的受光位置来求解射入位置。在使用图7所示的三种修正系数线l1~l3从距离h的下端hmin到上端hmax为止进行测量的情况下,例如,在hmin~{hmin (hmax-hmin)/3}的范围内使用修正系数线l1,在{hmin (hmax-hmin)/3}~{hmin 2(hmax-hmin)/3}的范围内使用修正系数线l2,在{hmin 2(hmax-hmin)/3}~hmax的范围内使用修正系数线l3。
64.图8是示出运算部61中的运算处理顺序、即从距离测量部3以及位置检测部4获取测量数据以及相对位置数据直到求解三维形状测量用的数据为止的处理顺序的一例的流程图。此处,以使用与距离h的大小对应的两种修正系数线l1、l2的情况为例进行说明。具体而言,关于可能的最大距离hmax,在距离h满足0<h≤hmax/2的情况下使用修正系数线l1,在hmax/2<h≤hmax的情况下使用修正系数线l2。
65.在步骤s101中,运算部61获取数据。此处获取的数据是由距离测量部3测量出的测量数据、由位置检测部4检测出的相对位置数据以及移动机构5的移动量hm。在步骤s102中,基于由倾斜角传感器43检测出的倾斜角,从由位置检测传感器41检测出的受光位置除去倾斜偏移贡献量,来计算仅依存于位移偏移的受光位置从原点的偏移、即受光位置。在步骤s103中,根据移动量hm来计算距离h。
66.在步骤s104中,判定计算出的距离h是否为hmax/2以下。当在步骤s104中判定为h≤hmax/2的情况下,进入步骤s105而选择修正系数线l1作为要使用的修正系数线。当步骤s105的处理结束后进入步骤s107。另一方面,当在步骤s104中判定为h>hmax/2的情况下,进入步骤s106而选择修正系数线l2作为要使用的修正系数线。当步骤s106的处理结束后进入步骤s107。
67.在步骤s107中,将计算出的受光位置应用于所选择的修正系数线,来计算射入位置。在步骤s108中,基于计算出的射入位置以及由倾斜角传感器43检测出的倾斜角,对由距
离测量部3获取到的测量数据进行修正。其结果,作为三维形状测量用的数据能够得到更正确地表示电梯升降路内的形状的修正后测量数据。
68.此外,在图8的流程图中,对修正系数线为两种的情况进行了说明,但根据电梯升降路100的高度、光束200的扩大来设定要使用的修正系数线的数量即可。修正系数线为一种的情况、三种以上的情况也与两种的情况相同地考虑即可。
69.根据以上说明的本发明的实施方式,起到以下的作用效果。
70.(c1)如图1及图2所示,形状测量系统1具备:基准光源部2,其向预定的方向射出光束200;距离测量部3,其对在与光束200的光束光轴210垂直的面8内的到测量对象的距离进行测量;位置检测部4,其设于距离测量部3,接受光束200来对距离测量部3相对于光束光轴210的相对位置信息进行检测;移动机构5,其使距离测量部3以及位置检测部4一体地沿光束光轴210移动;以及运算部61,其基于由距离测量部3测量出的距离信息和由位置检测部4检测出的相对位置信息来计算作为测量对象的电梯升降路100的三维形状。而且,位置检测部4具备:检测光学系统42,其供基准光源部2的光束200射入;以及位置检测传感器41,其配置于比检测光学系统42的焦点面46离检测光学系统42更近的位置,经由检测光学系统42接受基准光源部2的光束200,并输出受光位置作为相对位置信息。
71.通过将位置检测传感器41配置于比检测光学系统42的焦点面46离检测光学系统42更近的位置,受光位置变化中的位移偏移的贡献变大而倾斜偏移的贡献变小,能够改进检测信号的线形性。并且,由于受光位置变化中的倾斜偏移的贡献变小,所以能够防止光束光点因倾斜偏移的影响而从受光面偏移的情况。其结果,能够提高对位置检测部4的倾斜偏移以及位移偏移的鲁棒性,提高位置检测精度。
72.(c2)另外,通过将位置检测传感器41与焦点面46的距离设定为检测光学系统42的焦点距离f的10%~15%,能够适当地抑制位置检测传感器41的受光面中的光点尺寸的增大,从而能够进行光束200的良好的检测。
73.(c3)并且,在形状测量系统1中,当将图1所示的基准光源部2与检测光学系统42之间的距离设为h、将光束200的波长设为λ、将光束200的光束直径最小的部位的光束直径设为ω0、将检测光学系统13的开口直径设为d时,优选满足条件式“d>h
×
tan(λ/πω0)”。通过像这样构成,即使在因衍射的影响而在长距离传播时光束200的光束直径ω扩大的状况下,也能够使光束200整体可靠地射入至检测光学系统42。
74.(c4)尤其是,通过满足条件式“d>h
×
0.4”,相对于普通的红色激光(λ=650nm,ω0=0.5mm)、与其相比波长较短的光束200,能够使光束200整体可靠地射入至检测光学系统42。即,能够使用波长范围大的光束200,从而通用性优异。
75.(c5)并且,如图2、图3所示,优选检测光学系统42由两片以上的球面透镜420或一片以上的非球面透镜421构成。通过设为这样的结构,降低在周边部产生的像差的影响,能够提高长距离地进行形状测量时的位置检测精度。
76.(c6)并且,如图4所示,优选构成为在基准光源部2设置准直光学系统23,射出大致准直后的光束200。由此,能够抑制光束200的几何光学的扩大,从而能够抑制光束200的照射区域的扩大。
77.(c7)另外,如图4所示,优选设置光束整形光学系统22。由光束整形光学系统22将光束200的截面形状即光束光点形状修正成大致圆形,能够提高位置检测精度。
78.(c8)并且,如图4所示,优选还具备使基准光源部2移动来变更从基准光源部2射出的光束的方向以及与光束光轴210垂直的面中的基准光源部2的位置的作为变更部的倾斜调整部24以及位置调整部25。通过设置变更部,能够容易地进行调整以便基准光源部2的姿势以及位置成为适当的状态。
79.(c9)如图1所示,优选位置检测部4还具备检测距离测量部3的倾斜的倾斜角传感器43,输出由倾斜角传感器43检测出的倾斜和位置检测传感器41的受光位置作为相对位置信息。通过考虑由倾斜角传感器43检测出的倾斜,能够更高精度地进行形状测量。
80.(变形例1)
81.存储部62所存储的多个修正系数线的数据是在同一结构的位置检测部4中共用的数据。但是,根据位置检测部4的机台差异等,有射入位置与受光位置的相关产生微妙的差异的情况、应用修正系数线的距离范围的上端和下端产生微妙的不同的情况。为了进行更准确的三维形状测量,确认对于实际使用的位置检测部4,修正系数线是否正确地发挥功能,在并未正确地发挥功能的情况下需要进行校正处理。在变形例1中,对修正系数线的校正处理进行说明。
82.图9是用于说明校正处理的一例的流程图。优选利用移动机构5使距离测量部3以及位置检测部4升降移动,对应用修正系数线的距离范围的多个距离h进行修正系数线的校正处理,至少优选在距离h的范围的上端附近以及下端附近进行。校正处理在多个距离h的任一距离的情况下都是相同的处理,图9的流程图示出任意一处的距离h的校正处理。校正处理在数据处理部6的运算部61中进行。以下,作为修正系数线,假定使用图7的修正系数线l1(修正系数=1/tanβ)来进行说明。
83.在步骤s201中,使距离测量部3以及位置检测部4移动至应进行校正处理的预定距离h0。若距离测量部3以及位置检测部4不摆动而处于静止状态,则由位置检测传感器41检测的光束光点的受光位置位于受光面的原点。在步骤s202中,驱动图4所示的位置调整部25,使基准光源部2沿水平方向、例如x方向移动一定量d。在步骤s203中,获取位置检测传感器41的受光位置d0。在步骤s204中,使用修正系数线l1并根据受光位置来计算射入位置d1。
84.在步骤s205中,判定所计算出的射入位置d1的值是否与步骤s202中的基准光源部2的移动量d相等。当在步骤s205中判定为d=d1的情况(是)下,修正系数线l1适当,因此不校正修正系数线l1就结束校正处理。另一方面,当在步骤s205中判定为d≠d1的情况(否)下,在步骤s206中,校正修正系数线l1以使对d0的响应成为d。校正后的修正系数线l11存储在存储部62中,用作根据测量数据求解三维形状测量用的数据时的修正系数线。例如,在修正系数线l1是图7所示的倾斜β的直线的情况下,修正系数为1/tanβ(=d1/d0)。校正后的修正系数线l11的修正系数(1/tanα)使用受光位置d0以及移动量d由d/d0=(1/tanα)给出。
85.此外,在使用多个修正系数线的情况下,对各修正系数线分别进行校正处理。这样,通过进行修正系数线的校正,能够更高精度地进行三维形状测量。
86.根据上述的变形例1,起到以下的作用效果。
87.(c10)如图6~图8所示,还具备:存储部62,其存储基准光源部2与检测光学系统42之间的光束光轴方向距离即铅垂方向距离h所对应的多种修正数据(即,修正数据系数线l1、l2);作为光束光轴方向距离测量部的移动机构5,其测量光束光轴方向距离h;以及作为修正部的运算部61,其基于由移动机构5测量出的距离而选择多种修正数据的任一种(例
如,修正数据系数线l1),根据所选择的修正数据对受光位置d0进行修正并计算检测光学系统42的光束射入位置d1,运算部61基于计算出的光束射入位置d1来计算三维形状。准备与铅垂方向距离h对应的多种修正数据,基于由移动机构5测量出的距离而使用多种修正数据的任一种,从而能够更加精度良好地进行使用了修正数据的修正。其结果,能够实现三维形状的计算精度的提高。
88.(c11)如图9所示,优选在与修正数据建立了对应的距离的范围内设定一个以上的停止位置,使距离测量部3以及位置检测部4停止在所设定的各个停止位置(步骤s201),使基准光源部2沿与光束光轴210垂直的方向移动预定量d(步骤s202),并基于移动预定量d前后的受光位置的变化量(受光位置d0)和预定量d来校正修正数据(步骤s206)。然后,代替修正数据,数据处理部6的运算部61根据校正后的修正数据对受光位置进行修正来计算光束射入位置,并基于计算出的光束射入位置来计算三维形状。通过进行这样的修正数据的校正,能够进行与实际的测定状况对应的更高精度的形状测量。
89.(变形例2)
90.图10是示出变形例2中的形状测量系统1的简要结构的示意图。在电梯升降路100内,在水平方向上分离预定距离地设有两个基准光源部2a、2b。在位置检测部4设有包括位置检测传感器41a和检测光学系统42a的第一检测部4a、以及包括位置检测传感器41b和检测光学系统42b的第二检测部4b。其它结构与图1所示的结构相同,省略说明。
91.第一检测部4a以及第二检测部4b各自的位置检测传感器41a、41b以及检测光学系统42a、42b的结构设定为与图1所示的位置检测部4的位置检测传感器41以及检测光学系统42的结构相同。例如,位置检测传感器41a、41b配置于比检测光学系统42a、42b的焦点面离检测光学系统42a、42b更近的位置。并且,构成为也满足与光束直径ω相关的式(1)。
92.向数据处理部6发送距离测量部3的测量数据和位置检测部4的相对位置数据。相对位置数据包括第一检测部4a以及第二检测部4b的位置检测传感器41a、41b的各受光位置数据和倾斜角传感器43的倾斜角数据。数据处理部6基于所接收到的测量数据以及相对位置数据来计算电梯升降路100的三维形状。此时,数据处理部6基于位置检测传感器41a、41b的各受光位置来计算距离测量部3以及位置检测部4的偏摆方向的旋转偏移、即在铅垂方向上的旋转偏移,也考虑计算出的偏摆方向的旋转偏移来计算三维形状。
93.图11是说明偏摆方向的旋转偏移的图。x1-y1坐标是表示第一检测部4a的受光位置的坐标系,x2-y2坐标是与第一检测部4a的受光位置相关的坐标系。l10是位置检测传感器41a与位置检测传感器41b之间的水平方向的距离。图11中,位置检测传感器41a以及位置检测传感器41b在x方向上分离。图10的基准光源部2a、2b也设为在x方向上分离距离l10。
94.在位置检测部4没有偏摆方向旋转偏移的情况下,位置检测传感器41a的受光位置由圆形标记p1a表示,位置检测传感器41b的受光位置由圆形标记p1b表示。受光位置p1a位于x1-y1坐标的原点,受光位置p1b位于x2-y2坐标的原点。在位置检测部4有偏摆方向旋转偏移的情况下,例如,位置检测传感器41a的受光位置如方形标记p2a,位置检测传感器41b的受光位置如方形标记p2b。
95.距离测量部3例如将x1、x2轴正方向作为测量开始的基准而使旋转工作台32旋转360度,测量水平的面8中的360度整周的距离。由于在检测受光位置p1a、p1b的情况下没有偏摆方向旋转偏移,所以获取x1、x2轴正方向的距离数据作为基准位置的距离数据。另一方
面,在如受光位置p2a、p2b那样距离测量部3以及位置检测部4有角度θ的偏摆方向旋转偏移的情况下,测量开始时的距离数据成为相对于x1、x2轴偏移角度θ的方向的距离数据。
96.数据处理部6的运算部61基于受光位置p2a、p2b的坐标数据来计算角度θ。并且,运算部61将在360度整周的距离数据内的在角度(360-θ)处测量出的距离数据作为基准位置的距离数据。通过进行这样的修正而使基准位置的距离数据沿铅垂方向一致,能够提高位置检测精度,从而能够进行高精度的三维形状测量。
97.根据上述的变形例2,起到以下的作用效果。
98.(c12)如图10所示,基准光源部、位置检测传感器以及检测光学系统分别各设有两个,位置检测部4具备第一检测部4a和第二检测部4b。第一检测部4a包括配置在第一基准光源部2a的光束光轴上且供第一基准光源部2a的光束射入的第一检测光学系统42a、以及配置于比第一检测光学系统42a的焦点面离第一检测光学系统42a更近的位置且经由第一检测光学系统42a接受第一基准光源部2a的光束200的第一位置检测传感器41a。第二检测部4b包括配置在第二基准光源部2b的光束光轴上且供第二基准光源部2b的光束200射入的第二检测光学系统42b、以及配置于比第二检测光学系统42b的焦点面离第二检测光学系统42b更近的位置且经由第二检测光学系统42a接受第二基准光源部2b的光束200的第二位置检测传感器41b。而且,运算部61基于由距离测量部3测量出的距离信息和由第一检测部4a以及第二检测部4b分别检测出的相对位置信息来计算测量对象的三维形状。
99.通过具备第一检测部4a以及第二检测部4b,即使在距离测量部3以及位置检测部4产生了偏摆方向旋转偏移的情况下,也能够基于第一检测部4a以及第二检测部4b分别检测出的相对位置信息来修正偏摆方向旋转偏移的影响,从而能够实现三维形状测量的精度的提高。
100.此外,在以上的说明中,结构中的功能部、例如数据处理部6等除了电气电路、电子电路、逻辑电路、以及内置有上述各电路的集成电路之外,还可以通过由微型计算机、处理器以及类似的运算装置、rom、ram、闪存、硬盘、ssd、存储卡、光盘以及类似的存储装置、总线、网络以及类似的通信装置、以及周边的各装置的组合执行的程序来实现,在任一实现方式中,本发明都能够成立。
101.以上说明的各实施方式、各种变形例只不过是一例,在不损害发明特征的范围内,本发明不限定于上述内容。并且,在上文中对各种实施方式、变形例进行了说明,但本发明不限定于上述内容。在本发明的技术思想的范围内能想到的其它方式也包括在本发明的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。