tof装置、tof系统、设置状态通知方法
技术领域
1.本发明涉及tof装置、tof系统以及设置状态通知方法。
背景技术:
2.目前,已知基于由照射光被对象物反射回来为止的飞行时间来测定距离的tof(time of flight:飞行时间)法测定到对象物的距离的tof装置。专利文献1公开了这种tof装置。
3.即,专利文献1公开了一种测距成像装置,具备发光部、受光部和距离运算部。发光部射出由激光二极管(ld)、发光二极管(led)等光源发出的脉冲状的照射光。受光部利用二维状地排列有ccd或cmos等像素的图像传感器对照射到对象物并反射回来的脉冲状的反射光进行曝光,转换为电信号。距离运算部根据受光部的输出信号运算到对象物的距离。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2020-56698号公报
技术实现要素:
7.发明所要解决的课题
8.tof装置的人数计数和移动线取得的用途多,例如考虑设置在服装店等店铺的顶棚上。但是,由于tof装置的设置环境对性能产生影响,因此在开始运用之后进行用于错开设置场所的再次施工作业的情况也不少。
9.说明一个例子,通常,tof装置预先通过现场调查(也称为现调)决定设置场所后向施工人员发出指示,通过施工人员的施工作业来设置。但是,也有不进行现调而仅观察现场的附图而向施工人员指示设置场所的情况,也存在设置的好坏依赖于施工人员的经验的情况。而且,有时在开始运用之后不产生精度,从精度的观点出发,有时也在开始运用之后再次进行施工作业。
10.因此,本发明的目的在于提供一种能够自动地判定设置的好坏,能够降低进行再次的施工作业的损失的tof装置、tof系统以及设置状态通知方法。
11.用于解决课题的手段
12.根据本发明的第一方式,提供下述tof装置。tof装置具备处理器。处理器执行异常判定程序,并基于设置角度、干扰的影响、视野、测量距离中的至少任一个观点,判定所设置的状态是正常还是异常,并通知所述判定的结果。
13.根据本发明的第二方式,提供下述tof系统。tof系统具备tof装置、显示装置以及处理器。处理器执行异常判定程序,并基于设置角度、干扰的影响、视野、测量距离中的至少任一个观点,判定设置有tof装置的状态是正常还是异常,并使显示装置显示与所述判定有关的信息。
14.根据本发明的第三方式,提供下述的设置状态通知方法。设置状态通知方法是由
处理器执行的方法。设置状态通知方法基于设置角度、干扰的影响、视野、测量距离中的至少任一个观点,判定设置有tof装置的状态是正常还是异常,并通知所述判定的结果。
15.发明效果
16.根据本发明,提供一种能够自动地判定设置的好坏,能够降低再施工的损失的tof装置、tof系统以及设置状态通知方法。
附图说明
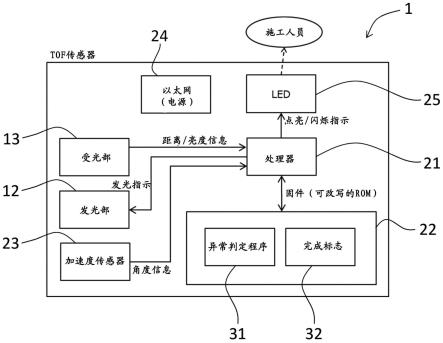
17.图1是用于说明tof传感器的结构的图。
18.图2是用于说明tof传感器的结构的硬件框图。
19.图3是用于说明异常判定程序的处理的一例的流程图。
20.图4是表示设置tof传感器的状态的一例的图。
21.图5是表示设置tof传感器的环境的一例的图。
22.图6是用于说明tof系统的结构的硬件框图。
23.图7是用于说明异常判定程序的处理的一例的流程图。
24.图8是表示角度异常的判定开始的情况下的处理的一例的流程图。
25.图9是表示设置角度与箭头显示的关系以及设置角度异常的情况下的显示图像的一例的图。
26.图10是表示视野异常的判定开始的情况下的处理的一例的流程图。
27.图11是表示视野异常的情况下的显示图像的一例的图。
28.图12是表示距离异常的判定开始的情况下的处理的一例的流程图。
29.图13是表示距离异常的情况下的显示图像的一例的图。
30.图14是异常状态被消除的tof传感器所取得的图像的一例。
具体实施方式
31.首先,参照图1,对第一实施方式中的tof传感器1(tof装置)的结构进行说明。tof传感器1能够取得距离数据的图像和ir图像(亮度图像),能够测量到对象物的距离。如图1所示,tof传感器1具备壳体11、发光部12、受光部13以及安装部14。发光部12射出由激光二极管(ld)、发光二极管(led)等光源发出的脉冲状的照射光。受光部13利用ccd、cmos等将像素排列成二维状的图像传感器对照射到对象物并反射回来的脉冲状的反射光进行曝光,并转换为电信号。发光部12和受光部13能够以可进行适当的测量的方式设置于适当的位置,在本实施方式中,如图1所示,发光部12和受光部13以相邻的方式设置。
32.安装部14是安装装置的部分,能够设为适当的结构。安装部14例如形成有多个螺纹孔,能够设为可进行使用了螺钉的施工的结构。另外,安装部14也可以是能够进行另外使用了固定器、托架等部件的施工的结构。
33.另外,tof传感器1也可以构成为能够相对于设置部分旋转来变更设置角度。因此,安装部14也可以具有用于变更设置角度的适当的旋转机构。另外,tof传感器1也可以另外使用具有能够变更设置角度的旋转机构的部件来进行安装。将tof传感器1安装于结构物内侧的上表面侧(例如,顶棚)来使用。而且,tof传感器1能够相对于安装的部分(例如,顶棚的设置面)变更设置角度。
34.接着,使用图2的硬件框图对tof传感器的结构进行说明。如图2所示,tof传感器1具备处理器21和固件22。处理器21具有运算功能,作为一例,能够设为cpu(central processing unit:中央处理单元)。固件22被设为可改写的rom,处理器21存储处理所使用的数据。固件22存储用于判定所设置的状态是正常还是异常的异常判定程序31。另外,在固件22中配置有作为在异常判定程序31的执行中使用的标志即完成标志32。
35.tof传感器1具备加速度传感器23(设置角度检测传感器)、电源24以及led25(灯)。加速度传感器23被适当地设置成能够检测出装置相对于设置面的倾斜角度作为角度信息。在本实施方式中,在考虑3轴的正交坐标系时(将相对于设置面为水平方向且观察发光部12以及受光部13的方向设为z轴,将相对于设置面垂直的方向设为y轴,将相对于设置面为水平方向且与z轴以及y轴正交的方向设为x轴时),加速度传感器23至少检测出绕x轴及绕z轴的相对于设置面的倾斜角度。
36.电源24是用于供给电力的结构。在本实施方式中,通过poe(power of ethernet:以太网的功率)来供给电力,并连接lan电缆。led25可以由适当的led灯构成。led25被适当地设置成施工人员等能够视觉确认,用于通知异常判定程序31的执行中的判定结果。
37.在本实施方式中,在设置有tof传感器1的情况下,执行异常判定程序31。接着,参照图3,对异常判定程序31的处理的一例进行说明。图3是用于说明异常判定程序的处理的一例的流程图。另外,异常判定程序31的处理的主体是处理器21。
38.在设置tof传感器1并供给电力的情况下(步骤101),执行异常判定程序31,首先,进行关于完成标志32是否为打开的检查(步骤102)。在此,在工厂出货时,完成标志32被设定为关闭。因此,在设置tof传感器1时,认为完成标志32为关闭。在步骤102中,在确认了完成标志32为打开的情况下,进行后述的步骤110的处理。另一方面,在确认了完成标志32为关闭的情况下,利用来自加速度传感器23的角度信息,开始关于设置角度是否正常的判定(步骤103)。
39.如图4所示,tof传感器1优选以相对于设置面水平的状态设置,例如,在设置于顶棚的情况下,优选相对于顶棚的面水平地设置。然而,存在相对于设置面倾斜的情况。另外,即使在使用固定器、托架等部件的情况下,也认为难以相对于设置面水平地设置。因此,在步骤103中,进行关于设置角度是否适当的判定(即,关于设置角度是否在预定范围内的判定)。
40.在本实施方式中,在步骤103中,在判定为装置相对于设置面的设置角度小于正负5度的情况下,向发光部12输出发光指示而发出激光(即,使光源发光),开始基于距离数据和亮度信息的ir图像的取得(步骤104)。
41.另一方面,在判定为装置相对于设置面的设置角度为正负5度以上的情况下,将每个预定时间的led25的闪烁次数设定为1次(步骤121),使激光熄灭(即,熄灭光源),停止距离数据和ir图像的取得(步骤125)。然后,进行后述的步骤126。
42.在步骤105中,以没有人或物体的移动的环境为前提(即,以不取得来自移动的物体的距离数据为前提),测定在步骤104中取得的距离数据的偏差,判定有无干扰。即,认为在离不移动的物体的距离数据中不产生偏差。因此,基于在预定时间(适当地设定,在本实施方式中为10秒钟)的距离数据中是否存在预定以上(适当地设定,在本实施方式中为10%以上)的偏差,来判定有无干扰。另外,作为一例,认为干扰是因设置在附近的其他tof传感
器、lidar的影响而产生的。
43.在步骤105中,在判定为距离数据没有10%以上的偏差的情况下,测定在步骤104中取得的ir图像的亮度,判定视野的异常(步骤106)。
44.另一方面,在判定为距离数据存在10%以上的偏差的情况下,将每个预定时间的led25的闪烁次数设定为2次(步骤122),使激光熄灭(即,熄灭光源),停止距离数据和ir图像的取得(步骤125)。然后,进行后述的步骤126。
45.在步骤106中,从亮度的观点出发进行关于视野的异常的判定。例如,如图5所示,认为由于反射率高的物体(在该例子中为白板),在ir图像中生成亮度高的部分,能够进行适当的测量的范围比正常的情况窄,视野变窄。因此,基于在步骤104中取得的ir图像中包含何种程度的预定亮度以上的像素,来判定视野是否正常。在此,该判定的基准能够适当地设定,但在本实施方式中,在ir图像中预定亮度以上的像素占30%以上的情况下,判定视野的异常。
46.在步骤106中,在判定为在ir图像中预定的亮度以上的像素不占30%以上的情况下,基于在步骤104中取得的距离数据,判定与测量距离是否适当有关的距离异常(步骤107)。
47.另一方面,在判定为在ir图像中预定的亮度以上的像素占30%以上的情况下,将每个预定时间的led25的闪烁次数设定为3次(步骤123),使激光熄灭(即,熄灭光源),停止距离数据和ir图像的取得(步骤125)。然后,进行后述的步骤126。
48.在步骤107中,从到对象物的距离的观点出发,进行关于测量距离的异常的判定。例如,如图5所示,通过接近装置的物体(在该例子中为照明)在距离数据的图像中生成无法进行适当测量的部分。因此,基于在步骤104中取得的距离数据,判定测量距离是否正常。在此,判定的基准能够适当地设定,但在本实施方式中,在图像中小于1m的距离数据占30%以上的情况下,判定测量距离的异常。
49.在步骤107中,在判定为图像中小于1m的距离数据不占30%的情况下,熄灭激光(即,熄灭光源),停止距离数据和ir图像的取得(步骤108)。然后,将完成标志32设定为打开(步骤109)。在步骤110中,使led25点亮(即,保持打开led的状态),结束异常判定程序31的处理。通过步骤110,tof传感器1成为能够进行通常动作的状态。
50.另一方面,在判定为图像中小于1m的距离数据占30%以上的情况下,将每个预定时间的led25的闪烁次数设定为4次(步骤124),使激光熄灭(即,熄灭光源),停止距离数据和ir图像的取得(步骤125)。然后,进行步骤126。
51.在步骤126中,在上述的步骤121、步骤122、步骤123或者步骤124中设定的条件下使led25闪烁。然后,异常判定程序31的处理结束。此外,在步骤126中,完成标志32不被打开,与步骤110不同,不成为能够进行通常的动作的状态。因此,为了通常使用tof传感器1,需要改变设置环境而再次执行异常判定程序31,而将完成标志32设为打开。
52.根据本实施方式,在判定为设置角度异常的情况下,在判定为存在干扰的情况下,在判定为视野异常的情况下,以及在判定为测量距离异常的情况下,使led25分别以不同的方式闪烁,因此施工人员等通过着眼于led25,能够容易地掌握判定为哪种异常。
53.在tof传感器1的施工中,例如考虑在设置场所形成有台阶部,或者因现有的设置物而产生死角。例如,在将tof传感器1设置于顶棚的情况下,考虑在顶棚形成有台阶部,或
者因照明、空调等而产生死角。而且,例如,认为由于死角的产生,照射光的照射、图像的取得受到限制,测量精度降低,伴随于此,人数计数、移动路线取得的精度降低。这样,tof传感器1受到设置环境的影响,但根据本实施方式,能够对设置环境是否适当进行判定并通知,因此能够适当地进行施工作业。因此,在开始运用之后,从精度的观点出发,能够减少再次进行施工作业的损失。
54.接着,对第二实施方式进行说明。在第二实施方式中,对使用tof传感器的tof系统的例子进行说明。图6是用于说明tof系统的结构的硬件框图。另外,有时省略与在第一实施方式中说明的内容相同的说明。
55.如图6所示,tof系统41具备tof传感器42和pc43(个人计算机)。tof传感器42和pc43构成为能够进行基于以太网51的通信。并且,与第一实施方式的情况相比,省略tof传感器的led的结构,pc43保存异常判定程序61。
56.pc43具备存储器52、处理器53以及画面54。存储器52构成为保存数据的适当的存储装置,例如能够设为hdd(hard diskd rive:硬盘驱动器)、rom。而且,存储器52存储有异常判定程序61。处理器53具有运算功能,作为一例,能够设为cpu。处理器53能够执行存储在存储器52中的异常判定程序61。画面54由显示器等适当的显示装置构成。如后所述,在画面54中,在异常判定程序61的执行中显示信息。
57.接着,参照图7对异常判定程序61的处理的一例进行说明。图7是用于说明异常判定程序的处理的一例的流程图。另外,异常判定程序61由pc43所具备的处理器53执行。
58.在设置有tof传感器42的情况下,异常判定程序61启动(步骤201)。然后,发出命令,开始与tof传感器42的通信(步骤202),发出命令并取得tof传感器42的设置角度的信息即角度信息(步骤203)。然后,进行tof传感器42的设置角度是否适当的判定。在本实施方式中,进行设置角度是否为正负5度以上的判定。
59.在此,在判定为设置角度适当的情况下,执行后述的步骤204。另一方面,在判定为设置角度不适当的情况下(即,判定为设置角度异常的情况下),在画面54中显示表示角度异常的信息和表示调整角度的方向的箭头(步骤221)。另外,表示角度异常的信息的显示方式只要能够掌握角度异常即可,没有特别限定。例如,也可以通过显示文字信息来表示角度异常。另外,例如也可以通过显示特定的符号来表示角度异常。
60.参照图8,对判定为设置角度异常的情况下的处理的详细情况进行说明。图8是表示角度异常的判定开始的情况下的处理的一例的流程图。在开始了角度异常的判定的情况下(步骤301),对绕x轴的角度(angle x)进行是否存在异常的判定(步骤301-a),与该处理不同地,针对绕z轴的角度(angle z)进行是否存在异常的判定(步骤301-b)。然后,在步骤301-a中对绕x轴的角度判定为有异常的情况下,在画面54显示表示改善倾斜的方向的蓝色箭头(步骤302-a)。在步骤301-b中对绕z轴的角度判定为有异常的情况下,同样地,在画面54上显示表示改善倾斜的方向的红色箭头(步骤302-b)。另外,在画面54中显示表示角度异常的信息(步骤303)。另外,与上述的说明同样地,能够认为相对于设置面为水平方向且观察发光部12及受光部13的方向为z轴,相对于设置面为水平方向且与z轴正交的方向为x轴。另外,说明了在步骤301-a之后处理步骤301-b的例子,但步骤301-b的处理也可以在步骤301-a的处理之前进行。另外,步骤303的处理例如可以在箭头的显示处理之前,也可以适当地变更开始处理的定时。然后,在角度异常被消除的情况下,处理结束(步骤304)。在此,在
步骤304中,也可以进行结束信息的显示的处理。
61.接着,对显示于画面54的箭头的显示的一例进行说明。图9是表示设置角度与箭头显示的关系的一例的图。如图9所示,在画面54中显示在当前的设置状态下的tof传感器42所取得的ir图像上重叠了表示装置的符号的图像。如图9所示,在将设置有发光部12和受光部13的一侧设为前侧时,在装置的后侧以远离设置面的方式绕x轴倾斜5度以上的情况下,用于表示将装置的后侧抬起的蓝色箭头显示于符号的下部。另外,在装置的左侧以远离设置面的方式绕z轴倾斜5度以上的情况下,用于表示抬起装置的左侧的红色箭头显示于符号的左部。这样,显示表示调整设置角度的方向的箭头。
62.另外,在本实施方式中,对关于绕x轴的角度使用蓝色箭头和关于绕z轴的角度使用红色箭头的例子进行了说明,但只要能够适当地显示改善倾斜的方向,则箭头的显示方式没有特别限定,例如,也可以使用这些以外的不同的色彩。另外,也可以显示相同色彩的箭头。
63.并且,能够参考显示于画面54的箭头来变更设置状态,消除角度异常。另外,在画面54中显示用于选择是否继续测定的信息(步骤225)。在此,在选择继续测定的情况下,再次执行步骤203。另一方面,在选择不继续测定的情况下,执行后述的步骤208。另外,关于是否继续测定的选择,使用适当的结构(例如,使用键盘、触摸面板等用于输入的结构)。
64.在步骤204中,发出命令,使tof传感器42发出激光。然后,开始距离数据和ir图像的取得。之后,在步骤205中,与上述说明的步骤105同样地判定有无干扰,在判定为距离数据的偏差不是10%以上的情况下,执行步骤206。另一方面,在判定为距离数据的偏差为10%以上的情况下,执行步骤222。在步骤222中,在画面54上显示表示干扰发生的信息。另外,表示干扰发生的信息的显示方式只要能够掌握干扰发生即可,没有特别限定。例如,既可以进行基于文字信息的显示,也可以进行基于特定符号的显示。而且,根据在画面54上显示的信息来变更设置场所等来变更干扰设定,由此能够消除干扰。另外,在画面54中,与上述同样地,显示用于选择是否继续测定的信息(步骤225),在选择继续测定的情况下,再次执行步骤203,在选择不继续测定的情况下,执行后述的步骤208。
65.在步骤206中,与上述说明的步骤106同样地判定为视野的异常,且在判定为在ir图像中预定的亮度以上的像素不占30%以上的情况下,执行步骤207。另一方面,在判定为在ir图像中预定的亮度以上的像素占30%以上的情况下,在画面54中显示表示视野异常的信息和表示调整传感器的方向(即,调整视野的异常的方向)的箭头(步骤223)。另外,表示视野异常的信息的显示方式只要能够掌握视野异常即可,与上述的情况同样地没有特别限定。
66.参照图10,对判定为视野异常的情况下的处理的详细情况进行说明。图10是表示开始视野异常的判定的情况下的处理的一例的流程图。在开始视野异常的判定的情况下(步骤401),在pc画面中显示表示视野异常的信息(步骤402)。然后,使用ir亮度较高的像素,求出ir亮度较高的区域的重心(步骤403)。然后,显示朝向与ir亮度较高的区域的重心相反的x轴方向(ir图像中的左右方向)的箭头(步骤403-a),并且,显示朝向与ir亮度较高的区域的重心相反的y轴方向(ir图像中的上下方向)的箭头(步骤403-b)。此外,步骤403-a以及步骤403-b所涉及的处理的顺序没有特别限定。另外,步骤402的处理例如可以在箭头的显示处理之后,也可以适当地变更开始处理的定时。然后,在视野异常被消除的情况下,
处理结束(步骤404)。在此,在步骤404中,也可以进行结束信息的显示的处理。
67.参照图11,对画面54的显示的详细情况进行说明。图11是表示视野异常的情况下的显示图像的一例的图。如图11所示,在画面54中,在当前的设置状态下的tof传感器42所取得的ir图像中显示表示ir图像的重心位置的标记、表示亮度高的区域中的重心的位置的标记以及表示避开亮度高的区域的方向的箭头。在本实施方式中,参照亮度高的区域中的标记的位置,从由ir图像的重心朝向上下左右的4种箭头中选择并显示与远离亮度高的区域的方向对应的箭头。具体而言,在图11的例子中,亮度高的区域中的标记位于ir图像的重心的右下侧。因此,为了表示向远离该标记的方向(即,从亮度高的区域偏离的方向即调整视野异常的方向)进行变更,而显示左方向的箭头(x轴方向的箭头)和上方向的箭头(y轴方向的箭头)。
68.另外,表示ir图像的重心位置的标记以及表示亮度高的区域中的重心位置的标记的显示方式也可以适当地变更。另外,这些标记也可以适当地省略。另外,箭头的显示方式只要能够掌握从亮度高的区域偏离的方向即可,也可以适当地变更。
69.然后,通过基于在画面54上显示的信息来变更设置状态(例如,通过向箭头的方向倾斜来变更设置角度),能够消除视野异常。另外,也可以通过改变设置场所(例如,通过向箭头的方向变更装置的设置场所)来消除视野异常。另外,在画面54中,与上述同样地,显示用于选择是否继续测定的信息(步骤225),在选择继续测定的情况下,再次执行步骤203,在选择不继续测定的情况下,执行后述的步骤208。
70.在步骤207中,与上述说明的步骤107同样地判定为测量距离异常,且在判定为图像中小于1m的距离数据不占30%的情况下,执行步骤208。另一方面,在判定为图像中小于1m的距离数据占30%以上的情况下,在画面54中显示表示距离异常的信息和表示调整传感器的方向(即,调整距离的异常的方向)的箭头(步骤224)。另外,表示距离异常的信息的显示方式只要能够掌握距离异常即可,与上述的情况同样地没有特别限定。
71.参照图12,对判定为距离异常的情况下的处理的详细情况进行说明。图12是表示开始了距离异常的判定的情况下的处理的一例的流程图。在开始距离异常的判定的情况下(步骤501),在pc画面中显示表示距离异常的信息(步骤502),使用距离异常的像素,求出距离异常的区域的重心(步骤503)。然后,显示朝向与距离异常的区域的重心相反的x轴方向(距离数据的图像中的左右方向)的箭头(步骤503-a),并且,显示朝向与距离异常的区域的重心相反的y轴方向(距离数据的图像中的上下方向)的箭头(步骤503-b)。此外,步骤503-a以及步骤503-b所涉及的处理的顺序没有特别限定。另外,步骤502的处理例如可以在箭头的显示处理之后,也可以适当地变更开始处理的定时。然后,在距离异常被消除的情况下,处理结束(步骤504)。在此,在步骤504中,也可以进行结束信息的显示的处理。
72.参照图13,对画面54的显示的详细情况进行说明。图13是表示距离异常的情况下的显示图像的一例的图。如图13所示,在画面54中,在当前的设置状态下的tof传感器42所取得的距离数据的图像中显示表示距离数据的图像的重心位置的标记、表示距离异常的区域中的重心的位置的标记以及表示避开距离异常的区域的方向的箭头。在本实施方式中,参照距离异常的区域中的标记的位置,从相对于距离数据的图像的重心朝向上下左右的4种箭头中选择并显示与从距离异常的区域离开的方向对应的箭头。具体而言,在图13的例子中,作为距离异常的区域中的标记位于距离数据的图像的重心的右上侧。因此,为了表示
向远离该标记的方向(即,从小于预定距离的距离数据的区域偏离的方向即调整距离异常的方向)进行变更,显示左方向的箭头(x轴方向的箭头)和下方向的箭头(y轴方向的箭头)。
73.另外,表示距离数据的图像的重心的位置的标记以及表示距离异常的区域中的重心的位置的标记的显示方式也可以适当地变更。另外,这些标记也可以适当地省略。另外,箭头的显示方式只要能够掌握从小于预定距离的距离数据的区域偏离的方向即可,也可以适当地变更。
74.并且,通过参考显示于画面54的箭头来变更设置状态(例如,通过向箭头的方向倾斜来变更设置角度),能够消除距离异常。此外,也可以通过改变设置场所(例如,通过向箭头的方向变更装置的设置场所)来消除距离异常。另外,在画面54中显示用于选择是否继续测定的信息(步骤225),在选择继续测定的情况下,再次执行步骤203。另一方面,在选择不继续测定的情况下,执行步骤208。
75.在步骤208中,为了使激光熄灭(即,使光源熄灭),使距离数据和ir图像的取得停止,发出命令。然后,异常判定程序61结束(步骤209)。如图14所示,通过执行该异常判定程序61,能够设置tof传感器42,使得视野、测量距离等没有异常且能够进行适当的测量。
76.根据本实施方式,从设置角度、有无干涉、视野的异常以及测量距离的异常的观点出发,进行tof传感器42的设置状态是否适当的判定,在判定为异常的情况下,将该信息作为通知内容显示于画面54。并且,能够参照通知内容进行适当的施工作业。因此,在开始运用之后,从精度的观点出发,能够减少再次进行施工作业的损失。
77.根据以上说明的实施方式,提供一种由处理器执行的设置状态通知方法,基于设置角度、干扰的影响、视野、测量距离中的至少任意一个观点,判定设置tof传感器的状态是正常还是异常,并通知判定的结果。另外,提供一种使处理器执行该设置状态通知方法的程序。
78.以上,对实施方式进行了说明,但本发明并不限定于上述的实施方式,包括各种变形例。例如,对于实施方式的结构的一部分,能够进行其他结构的追加、删除、置换。
79.作为处理器的一个例子,可以考虑cpu,但只要是执行预定处理的主体,也可以是其他的半导体器件(例如,gpu)。
80.关于设置角度、干扰的有无、视野的异常以及距离的异常的判定基准,能够适当地变更。例如,在上述的说明中,设置角度的基准值为正负5度,但只要能够适当地判定是否在适当的范围内即可,设置角度的基准值也可以适当地变更。关于干扰的有无,只要进行基于距离数据的偏差的适当的判定即可,既可以使用与10秒不同的时间的距离数据,也可以进行基于10%以外的偏差的判定。关于视野的异常,只要进行适当的判定即可,也可以适当地变更判定中使用的亮度的基准值、区域的大小。关于距离的异常,只要进行适当的判定即可,也可以适当地变更判定中使用的距离的基准值、区域的大小。
81.加速度传感器23只要能够适当地检测相对于设置面的倾斜角度即可,能够设为公知的结构。另外,也可以代替加速度传感器23而使用陀螺仪传感器等其他公知的结构作为检测设置角度的设置角度检测传感器。在上述的说明中,对通过poe供给电力的例子进行了说明,但也可以通过其他适当的方法供给电力。另外,在第二实施方式中,说明了tof传感器42与pc43之间的基于以太网51的通信,但也可以进行基于其他方法的通信。例如,也可以设置用于进行无线通信的结构,进行无线通信。
82.外部的显示装置也可以用作画面。在该情况下,也可以省略与pc43中的画面54相关的结构。
83.符号说明
[0084]1ꢀꢀ
tof传感器
[0085]
12 发光部
[0086]
13 受光部
[0087]
21 处理器
[0088]
25 led
[0089]
31 异常判定程序
[0090]
41 tof系统
[0091]
42 tof传感器
[0092]
43 pc
[0093]
53 处理器
[0094]
54 画面
[0095]
61 异常判定程序。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。