1.本发明涉及细胞分析,特别涉及毛细针的自动化更换装置和方法。
背景技术:
2.细胞是人类研究生命奥秘、阐释疾病机理的重要研究对象。传统的细胞生物学研究常常以群体细胞作为研究对象,已经为人类探索出了许多疾病的致病机制和治疗方法。但基于群体细胞的平均研究结果,忽略了细胞“异质性”,存在明显缺陷。单细胞分析能够弥补过去由于群体细胞采样而导致的被掩盖和遗漏掉的重要信息,使人类对疾病的研究更准确和全面。单细胞质谱分析技术能够实现对多组分样品同时检测,获得大量样品中未知成分的结构信息,具有较高的灵敏度,为单细胞代谢组学、蛋白质组学等研究提供有效的技术支撑。
3.目前的单细胞质谱分析技术的不足之处主要在于:
4.1.毛细针贯穿全流程使用,存在较大的交叉污染隐患,基于毛细针的方案存在单细胞之间的交叉污染问题;
5.部分方案引入了毛细针清洗技术,但使得系统工作流程变得更加复杂,可靠性降低。
6.2.双侧毛细针协同操作,甚至可能要求旋转电机介入,控制复杂、易出错。
技术实现要素:
7.为解决上述现有技术方案中的不足,本发明提供了一种毛细针的自动化更换装置。
8.本发明的目的是通过以下技术方案实现的:
9.毛细针的自动化更换装置,所述自动化更换装置包括:
10.夹持单元,所述夹持单元包括基座、第一夹爪、第二夹爪、导轨和驱动单元,所述第一夹爪和/或第二夹爪设置在所述导轨上,所述导轨设置在所述基座上,所述驱动单元用于驱动所述导轨上夹爪正向和反向移动;所述第一夹爪和第二夹爪上具有相对设置的允许所述毛细针进入的凹槽,自下而上地,位置相对的凹槽底壁间的距离变大;
11.接口单元,所述接口单元固定在所述基座上,且处于第一夹爪和第二夹爪之间;所述接口单元具有气体通道,导电体连接弹性件,并设置在所述气体通道内,第一密封件设置在所述导电体上,随着所述导电体的移动实现所述气体通道的开口端的开启和封闭。
12.本发明的另一目的在于提供了与自动化更换装置结合的毛细针,该发明目的是通过以下技术方案得以实现的:
13.毛细针,所述毛细针包括毛细管;所述毛细针还包括:
14.固定件,所述固定件具有允许所述毛细管穿过的通道,所述固定件包括外径变小段;
15.放电针,所述放电针设置在所述固定件上,穿过所述通道并插入所述毛细管内;所
述通道和所述放电针间具有缝隙。
16.本发明的另一目的在于提供了毛细针的自动化更换方法,该发明目的是通过以下技术方案得以实现的:
17.毛细针的自动化更换方法,所述毛细针的自动化更换方法为:
18.夹持单元移动到毛细针处;
19.驱动单元驱动导轨上的第一夹爪和/或第二夹爪移动,毛细针被第一夹爪和第二夹爪上的位置相对的凹槽夹持,并在凹槽内朝着接口单元正向移动;
20.所述毛细针的放电针顶着处于接口单元气体通道内的导电体正向移动,与所述导电体连接的弹性件发生形变,所述气体通道的开口端开启,所述气体通道和毛细针的内部连通;
21.毛细针使用结束后,驱动单元驱动导轨上的第一夹爪和/或第二夹爪移动,位置相对的凹槽分离,弹性件驱动所述导电体反向移动,所述开口端封闭,毛细针反向移动,并脱离凹槽。
22.与现有技术相比,本发明具有的有益效果为:
23.1.避免了交叉污染;
24.在毛细针承载单元设置多个毛细针,如呈矩阵式分布,在每次单细胞检测中,首先夹取新的毛细针,之后用于其它工作,如单细胞萃取和检测,毛细针作为耗材使用,避免了毛细针间的交叉污染;
25.2.结构简单;
26.在同一时间,仅有一个毛细针工作,也即仅需一台三维移动单元实现了毛细针的三维移动,进而实现后续操作,如单细胞萃取、检测,无需其他控制部件,降低了系统复杂度,提升了可靠性;
27.接口单元的设计,实现了气路和电路的同时连通和断开,降低了结构复杂度;
28.3.更换效率高;
29.毛细针的加载和回收均是自动化实现,显著地提高了更换效率;
30.毛细针的各段外径变化设计,以及与此匹配的凹槽的设计,使得毛细针快速、准确地被第一夹爪和第二夹爪夹持,且同时实现了气路和电路的导通,提高了整体工作效率。
附图说明
31.参照附图,本发明的公开内容将变得更易理解。本领域技术人员容易理解的是:这些附图仅仅用于举例说明本发明的技术方案,而并非意在对本发明的保护范围构成限制。图中:
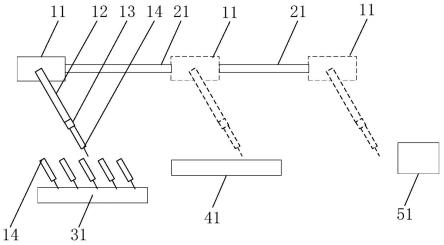
32.图1是根据本发明实施例的毛细针的自动化更换装置的结构示意图;
33.图2是根据本发明实施例的毛细针的结构示意图。
具体实施方式
34.图1-2和以下说明描述了本发明的可选实施方式以教导本领域技术人员如何实施和再现本发明。为了解释本发明技术方案,已简化或省略了一些常规方面。本领域技术人员应该理解源自这些实施方式的变型或替换将在本发明的范围内。本领域技术人员应该理解
下述特征能够以各种方式组合以形成本发明的多个变型。由此,本发明并不局限于下述可选实施方式,而仅由权利要求和它们的等同物限定。
35.实施例1:
36.图1示意性地给出了本发明实施例1的毛细针的自动化更换装置的结构图,如图1所示,所述的毛细针的自动化更换装置包括:
37.夹持单元1,所述夹持单元包括基座11、第一夹爪12、第二夹爪13、导轨和驱动单元,所述第一夹爪12和/或第二夹爪13设置在所述导轨上,所述导轨设置在所述基座11上,所述驱动单元用于驱动所述导轨上夹爪正向和反向移动;所述第一夹爪12和第二夹爪13上具有相对设置的允许所述毛细针2进入的凹槽14-15,自下而上地,位置相对的凹槽14-15底壁间的距离变大;
38.接口单元3,所述接口单元3固定在所述基座11上,且处于第一夹爪12和第二夹爪13之间;所述接口单元3具有气体通道,导电体31连接弹性件,并设置在所述气体通道内,第一密封件设置在所述导电体31上,随着所述导电体31的移动实现所述气体通道的开口端的开启和封闭。
39.为了实现接口单元3和毛细针2间的密封,进一步地,所述接口单元3还包括:
40.第二密封件32,所述第二密封件32环绕所述开口端。
41.为了提高毛细针2夹持效率,进一步地,所述第一夹爪12和第二夹爪13分别设置在所述导轨上,在所述驱动单元驱动下朝着相反方向移动,如夹持毛细针2时相向移动,丢弃毛细针2时背向移动。
42.为了储备毛细针2,进一步地,所述毛细针2的自动化更换装置还包括:
43.承载单元,所述承载单元具有多个呈矩阵式分布的毛细针承载位;
44.移动单元,所述移动单元用于实现所述承载单元和夹持单元间的相对的三维移动;
45.多个第二磁吸部件,所述第二磁吸部件设置在所述承载位。
46.图2示意性地给出了本发明实施例1的毛细针2的结构图,如图2所示,所述的毛细针包括:
47.毛细管23,如玻璃毛细管;
48.固定件24,所述固定件24具有允许所述毛细管穿过的通道20,所述固定件24包括外径变小段21;
49.放电针25,所述放电针25设置在所述固定件24上,穿过所述通道20并插入所述毛细管23内;所述通道20和所述放电针25间具有缝隙。
50.为了准确、快速地夹持毛细针2,进一步地,所述固定件24还包括外径变大段22,所述外径变小段21和变大段22之间为外径不变段27。
51.本发明实施例的毛细针的自动化更换方法,也即根据本实施例的更换装置的工作方法,所述毛细针的自动化更换方法为:
52.夹持单元1移动到毛细针2处;
53.驱动单元驱动导轨上的第一夹爪12和/或第二夹爪13移动,毛细针2被第一夹爪12和第二夹爪13上的位置相对的凹槽14-15夹持,并在凹槽14-15内朝着接口单元正向移动,也即随着凹槽14-15的夹持,将凹槽间的一个方向上的移动转换为毛细针2在另一方向上的
移动,两个方向间夹角为直角;
54.所述毛细针2的放电针25顶着处于接口单元3气体通道内的导电体31正向移动,与所述导电体31连接的弹性件发生形变,所述气体通道的开口端开启,所述气体通道和毛细针2的内部连通;
55.毛细针2使用结束后,驱动单元驱动导轨上的第一夹爪和/或第二夹爪移动,位置相对的凹槽14-15分离,弹性件驱动所述导电体31反向移动,所述开口端封闭,毛细针2反向移动,并脱离凹槽14-15。
56.为了储备多个毛细针2以用于更换,进一步地,多个毛细针2呈矩阵式设置在承载单元上,
57.所述承载单元和夹持单元1间发生三维移动,使得所述夹持单元1移动到选择的毛细针2处。
58.为了固定毛细针2,所述毛细针2上设置第一磁吸部,29,所述承载单元的毛细针承载位处设置第二磁吸部件。
59.为了与夹持单元1匹配,进一步地,如图2所示,所述毛细针2包括毛细管23、固定件24和放电针25,所述固定件23具有允许所述毛细管23穿过的通道20,所述固定件24包括外径变小段21;所述放电针25设置在所述固定件24上,穿过所述通道20并插入所述毛细管23内;所述通道20和所述放电针25间具有缝隙。
60.实施例2:
61.根据本发明实施例1的毛细针的自动化更换装置及其工作方法的应用例。
62.在本应用例中,如图1所示,毛细针更换装置中,第一夹爪12和第二夹爪13均设置在导轨上,在驱动单元驱动下,方向相反地移动,也即相互接近和分离;第一夹爪12上配置凹槽14,第二夹爪13上配置凹槽15,二个凹槽14-15的开口相对,自下而上地,二个凹槽14-15的底壁间的距离变大,之后维持不变;
63.接口单元3中,气体通道内设置导电体31、弹性件、第一密封件和第二密封件32,所述第一密封件套在所述导电体31上,弹性件采用弹簧,一端连接所述导电体31,在弹性件作用下,所述第一密封件与气体通道的开口端接触,实现了开口端的封闭;当有外力驱动导电体31时,弹性件被进一步压缩,第一密封件和开口端分离,所述开口端开启;第二密封件32环绕开口端设置;
64.承载单元,所述承载单元具有多个呈矩阵式分布的毛细针承载位;
65.移动单元,所述移动单元用于实现所述承载单元和夹持单元间的相对的三维移动,使得夹持单元对应承载单元上选择的毛细针2;
66.多个第二磁吸部件,所述第二磁吸部件设置在所述承载位,和毛细针2上的第一磁吸部件29配合,从而固定毛细针2。
67.如图2所示,毛细针2包括:玻璃毛细管;固定件24具有允许所述毛细管穿过的通道20,所述固定件24包括外径不变段26、外径变小段21、外径不变段27和外径变大段22;放电针25设置在所述固定件24上,一端为球状,另一端穿过所述通道20并插入所述毛细管23内;所述通道20和所述放电针25间具有缝隙;第一磁吸部件29设置连接固定件24,且具有毛细管23通过的通道;利用毛细针外径不变段26、外径变小段21的设计,以及匹配的二个凹槽14-15间距的设置,使得二个凹槽14-15在夹持毛细针2的同时,实现了毛细针2的移动,毛细
针2与接口单元接触,挤压第二密封件32。
68.本发明实施例的毛细针的自动化更换方法,也即根据本实施例的更换装置的工作方法,所述毛细针的自动化更换方法为:
69.移动单元工作,使得夹持单元1和承载单元上选择的毛细针2对应,第一夹爪12和第二夹爪13处于选择的毛细针2的两侧;
70.驱动单元驱动导轨上的第一夹爪12和第二夹爪13水平方向上接近,凹槽14-15的底端推动毛细针2的外径变小段21,使得毛细针2竖直向上平移,毛细针2的外径不变段26、外径变小段21进入凹槽14-15内;
71.向上移动的毛细针2的顶端挤压第二密封件32,实现毛细针2与接口单元1间的密封,放电针25呈球状的一端推动导电体31上移,使得第一密封件与开口端分离,开口端开启,气体通道与毛细针2的通道20连通,实现了电路和气体的同时连通;
72.毛细针2使用结束后,驱动单元驱动导轨上的第一夹爪和第二夹爪移动,位置相对的凹槽14-15分离,弹性件驱动所述导电体31反向移动,毛细针2和接口单元3间分离,所述开口端封闭,毛细针2反向移动,并脱离凹槽14-15放电针25和导电体31分离,实现了气路和电路断开。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。