1.本实用新型涉及煤矿综采技术领域,尤其涉及一种用于采煤过程的自动化控制系统。
背景技术:
2.煤炭高效集约化生产是煤炭工业发展的方向,采用先进的开采技术与装备是矿井高效集约化生产的核心。“十二五”期间,煤炭工业新的发展形势对煤矿装备提出了更高更新的要求,煤炭生产集约化,要求煤矿装备向成套化、高可靠性方向发展,煤炭工艺的安全生产对自动化、智能化和信息化的煤矿装备需求增加。
3.实现少人、无人的自动化开采技术是当前世界采矿界的研究热点,美国和澳大利亚的技术位于世界前列,20世纪80年代即实现了“三机”的自动化和井下环境安全信息实时监测。90年代初,加拿大开始研究遥控开采技术,芬兰也宣布了智能采矿技术方案。世界主要产煤国高产高效技术迅速发展,综采工作面自动化技术也应运而生。液压支架作为综采工作面的重要支护设备,其自动化程度将直接影响到综采工作面的高产高效及自动化程度。
技术实现要素:
4.为了克服上述技术缺陷,本实用新型的目的在于提供一种自动化程度高、效率佳、安全性佳的用于采煤过程的自动化控制方法及系统。
5.本实用新型公开了一种用于采煤过程的自动化控制系统,包括采煤机和中控集成器,所述采煤机上设有惯导,所述中控集成器与所述采煤机和所述惯导连接;所述惯导记录采煤机的三维位置数据并发送至所述中控集成器;所述中控集成器根据所述三维位置数据绘制采煤机的采煤工作轨迹曲线,并控制所述采煤机的采煤面朝向第一方向或第二方向或第三方向或第四方向移动第一预设距离且同时减小所述采煤机的前进方向的移动速度;所述第一方向、所述第二方向、所述第三方向、所述第四方向与所述采煤机的前进方向垂直,且所述第一方向与所述第二方向相对,所述第三方向与所述第四方向相对;
6.所述中控集成器包括曲线绘制组件,所述中控集成器通过所述曲线绘制组件将三维位置数据绘制成采煤工作轨迹曲线;所述中控集成器包括计数组件,所述计数组件累计所述采煤机的采煤面朝向第一方向或第二方向或第三方向或第四方向移动的次数c;
7.还包括液压支架,所述采煤机设于所述液压支架上,所述液压支架通过伸缩架动作带动所述采煤机移动;所述液压支架与所述中控集成器连接,所述中控集成器控制所述液压支架执行伸缩架动作;所述采煤机上设有位置检测组件,所述液压支架还包括若干个支撑架,每个所述支撑架上设有与所述位置检测组件相通讯连接的位置接收组件;每个所述支撑架上还设有控制器,所述中控集成器与每个所述支撑架上的所述控制器连接、单独控制每个所述控制器;所述控制器与所述位置接收组件连接,当所述支撑架上的所述位置接收组件接收到所述位置检测组件的位置信号后,所述控制器控制该支撑架进行收架动
作;
8.中控集成器还包括用于采集采煤路径上的待采煤体的地质参数的地质勘探模块和用于进行采煤记忆截割的处理模块;
9.所述中控集成器包括设于地面的第一中控集成器和设于采煤井内的第二中控集成器。
10.优选的,所述位置检测组件为红外线发射组件,所述位置接收组件为红外线接收组件;或所述位置检测组件为轴编码器,所述位置接收组件为编码数据接收器。。
11.优选的,所述位置检测组件为轴编码器,所述位置接收组件为编码数据接收器,且所述采煤机上还设有红外线发射组件,每组支撑架上还设有红外线接收组件。。
12.优选的,所述液压支架上设有位移传感器,所述位移传感器与所述控制器连接,所述控制器通过所述位移传感器获取所述液压支架的移动距离。
13.优选的,所述液压支架包括导轨和设于导轨上的若干组支撑架;所述采煤机设于所述导轨上,所述采煤机在前进过程中与若干组不同的所述支撑架连接,所述控制器控制不同的所述支撑架执行伸缩架动作,以控制所述采煤机在采煤工作过程中采煤面朝向第一方向或第二方向或第三方向或第四方向移动。
14.优选的,每个所述支撑架上设有倾角检测器,用于检测所述支撑架的倾角;所述中控集成器包括报警模块。
15.优选的,所述采煤机、每个所述支撑架、所述中控集成器上设有通讯模块,各个通讯模块之间通过5g网络或无线wifi进行通讯。
16.优选的,所述采煤机包括电空箱,所述惯导设于所述电空箱内。
17.优选的,所述支撑架上还设有摄像头,所述摄像头设于云台上;所述摄像头与所述中控集成器连接。
18.优选的,所述液压支架与泵站连接,所述泵站包括若干个泵组。
19.采用了上述技术方案后,与现有技术相比,具有以下有益效果:
20.1.通过设置在采煤机内部的惯导可以实施监控采煤机的行程路径,以获取行程路径曲线,根据该曲线的曲直度来判断采煤机的采煤面是否为直线,若不为直线,则及时调整采煤面,使其在同一直线上进行采煤作业,防止采煤面弯曲而导致的采煤效率低下和各个采煤路径相互干扰的情况;
21.2.每个支撑架单独控制,且通过网络互相通讯传递信息,当采煤机运行时,通过采煤机的位置及时收架以为采煤机预留采煤空间;根据采煤机的运行速度来判断一个支撑架进行收架、还是多个支撑架进行收架,当采煤机的运行速度过快时,为了防止采煤机运行至此时来不及及时收架则需要多个支撑架进行收架,更加安全。
附图说明
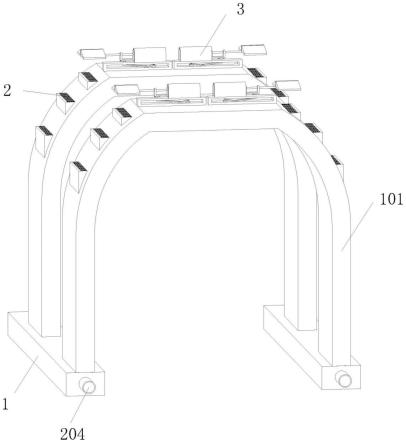
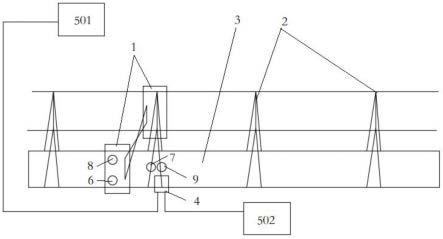
22.图1为本实用新型提供的用于采煤过程的自动化控制系统的结构示意图。
23.其中:1-采煤机,2-支撑架,3-导轨,4-控制器,501-第一中控集成器,502-第二中控集成器,6-红外线发射组件,7-红外线接收组件,8-轴编码器,9-编码数据接收器。
上设有位置检测组件,液压支架还包括若干个支撑架2,每个支撑架2上设有与位置检测组件相通讯连接的位置接收组件;每个支撑架2上还设有控制器4,中控集成器与每个支撑架2上的控制器4连接、单独控制每个控制器4;控制器4与位置接收组件连接,当支撑架2上的位置接收组件接收到位置检测组件的位置信号后,控制器4控制该支撑架2 进行收架动作。
34.具体的,采煤机1设于刮板机上,刮板机在液压支架上移动,从而带动采煤机1移动。
35.中控集成器还包括用于采集采煤路径上的待采煤体的地质参数的地质勘探模块和用于进行采煤记忆截割的处理模块;中控集成器包括设于地面的第一中控集成器501和设于采煤井内的第二中控集成器502。
36.一种优选的,位置检测组件为红外线发射组件6,位置接收组件为红外线接收组件7;或位置检测组件为轴编码器8,位置接收组件为编码数据接收器9。
37.另一种优选的,位置检测组件为轴编码器8,位置接收组件为编码数据接收器9,且采煤机1上还设有红外线发射组件6,每组支撑架2上还设有红外线接收组件7。。
38.液压支架上设有位移传感器,位移传感器与控制器4连接,控制器4通过位移传感器获取液压支架的移动距离。
39.控制器4为一执行控制器,单独控制一个支撑架2的动作。通常控制器4与中控集成器的电液控制模块连接,中控集成器通过电液控制模块控制每个控制器4。
40.液压支架包括导轨3和设于导轨3上的若干组支撑架2;采煤机1设于导轨3上,采煤机1在前进过程中与若干组不同的支撑架2连接,控制器4控制不同的支撑架2执行伸缩架动作,以控制采煤机1在采煤工作过程中采煤面朝向第一方向或第二方向或第三方向或第四方向移动。
41.每个支撑架2上设有倾角检测器,用于检测支撑架2的倾角;中控集成器包括报警模块。
42.采煤机1、每个支撑架2、中控集成器上设有通讯模块,各个通讯模块之间通过5g 网络或无线wifi进行通讯。
43.支撑架2上还设有摄像头,摄像头设于云台上;摄像头与控中控集成器连接。通常每六台支撑架上设置一个摄像头。液压支架与泵站连接,泵站包括若干个泵组。
44.本实用新型还提供上述系统的控制方法,主要包括液压支架自动跟架过程、采煤过程的采煤面自动找直过程和采煤参数的记忆截割过程,从该三个方向的高度自动化以实现整个采煤工作的自动化。
45.采煤参数的记忆截割过程,首先在人工割煤过程中,储存过程中的各项割煤参数,然后在下一次的自动割煤过程中,提取该参数进行自动割煤,具体包括如下步骤:
46.采煤机1在人工操作的采煤前进过程中,以第一预设距离为间隔、持续采集采煤路径的地理位置信息,并储存与采煤路径上的每个地理位置相对应的外部输入的截割参数,获取地理位置信息与截割参数对应的第一截割参数提取表;
47.采煤机1在人工操作的采煤前进过程中,以第二预设距离为间隔、持续采集采煤路径上的待采煤体的地质参数,并储存与采煤路径上的每个待采煤体位置相对应的外部输入的截割参数;判断地质参数位于若干个预设地质信息范围中的哪一范围,并将储存的截割参数与对应的待采煤体位置的地质参数所属的预设地质信息范围进行联结,获取地质参数
与截割参数对应的第二截割参数提取表;
48.采煤机1在自动采煤前进过程中,选择依据第一截割参数提取表和/或第二截割参数提取表提取实时截割参数,并按照实时截割参数进行采煤截割。
49.采煤机1在自动采煤前进过程中,一个割煤周期完结后再次选择依据第一截割参数提取表和/或第二截割参数提取表提取实时截割参数,并按照实时截割参数进行采煤截割,一个割煤周期为采煤机1前进第一预设距离或第二预设距离的割煤过程。即,若上一周期提取的为第一截割参数提取表,则上一周期为第一预设距离的割煤过程,当该周期的割煤过程完结后,可以选择继续提取第一截割参数提取表,也可以改用第二截割参数提取表。
50.割煤参数包括但不限于截割高度、速度、功率(表现为电压、电流),采煤机1的滚筒倾角等。
51.地质信息参数包括但不限于煤层的湿度、硬度、化学元素等。
52.本实用新型在人工割煤过程中,通过地理位置信息和地质信息两个路径与割煤参数进行对应联结,创建割煤参数查找表,供后续的自动割煤过程根据实际行进路径和实际地质参数来灵活选择割煤参数,实现安全性高、准确度高的自动化割煤过程;在自动割煤过程中,实时监控割煤结果和割煤参数的执行,若存在异常,立即上报,甚至停止作业,保障割煤过程的安全性。
53.较佳的,为了保证割煤过程的安全性,需要实施监控割煤过程,若出现异常,及时上报,发出警示信息,甚至停止截割作业。即采煤机1在自动采煤前进过程中,持续检测采煤结果信息,并判断采煤结果信息是否位于预设采煤信息阈值范围内,若否,则上传采煤异常提示信息并记录当前地理位置信息和地质参数、以及实际所采用的截割参数。
54.一种优选的,采煤结果信息包括实际采煤量,根据实际割煤获得的煤量来判断割煤过程是否正常。
55.较佳的,除了根据割煤结果来判断割煤过程的异常,还可根据割煤参数的执行情况来判断,即判断各项实际截割信息是否位于截割参数范围,若否,则上传采煤异常提示信息并记录当前地理位置信息、地质参数、实际所采用的截割参数,且停止截割作业。且可以在下一个割煤周期选择提取第一截割参数提取表,或是第二截割参数提取表。
56.具体的:
57.若当前提取的是第一截割参数提取表,则判断各项实际截割信息是否分别位于当前地理位置信息所对应的第一截割参数范围。第一截割参数范围为第一截割参数提取表中地理位置信息所对应的截割参数的正负百分之五的误差值的范围。例如,当前地理位置信息所对应的截割高度参数为3m,则第一截割高度范围为3.15-2.85m。
58.需要说明的是,该正负百分之五的误差值并不为实现本实用新型所限制的误差范围,在实际过程中,亦可采用其他的误差值范围。
59.若当前提取的是第二截割参数提取表,则判断各项实际截割信息是否分别位于当前地质参数所对应的第二截割参数范围。第二截割参数范围为第二截割参数提取表中地质参数所属的预设地质信息范围所对应的截割参数的正负百分之十的误差值的范围。
60.同样的,该正负百分之十的误差值并不为实现本实用新型所限制的误差范围,在实际过程中,亦可采用其他的误差值范围。
61.较佳的,为了保证第二截割参数提取表能够适应复杂的采煤地质地形,预设地质
信息范围应越大越好,通常,应包括至少5个以上的预设地质信息范围。多样的选择使得最终确定的参数更加符合实际情况。
62.较佳的,可以根据地质参数的每个参数的上下阈值设定预设地质信息范围。即严格按照每个参数的上下阈值依次设置预设地质信息范围,多个参数之间互不影响。
63.另外,还可通过算法综合地质参数的每个参数,以获取预设地质信息范围。即将各个参数联合起来通过算法进行综合分析,以获取预设地质信息范围。
64.液压支架的自动跟架过程,基于自动跟架系统,自动跟架系统主要包括采煤机1、运输组件和支护组件,支护组件主要起到工作面支撑的作用,可有效防止工作面坍塌,支护组件主要包括的是液压支架,液压支架是以高压液体为动力,由若干液压元件(油缸和阀件)与一些金属结构件按一定连接方式组合而成的一种支撑和控制顶板的采煤工作面设备,液压支架是用来有效而可靠的支撑和控制工作面顶板,同时还能前移和推进工作面的输送组件,与采煤机1、输送组件配套使用,液压支架具有结构强度高、支护性能好、移架速度快、安全可靠等优点,能使采煤工作面达到高产量、高功效和高回采率,减轻劳动强度,降低成本和提高掘进生产率,实现安全生产。
65.液压支架是依靠高压液体、立柱和相应的动力千斤顶可实现升架、收架、推溜、移架四个基本动作:升架将操作阀置于“升架”位置,由泵站经压力胶管输送来的高压液体通过液控单向阀进入立柱下腔;立柱上腔的液体通过操纵阀流至回液管,于是立柱向外伸出支架升起;推溜,在支架处于支撑的状态下,将操纵阀置于“推溜”位置,高压液体经操纵阀进入推移千斤顶的左腔;其右腔液体经操纵阀流至回液管。此时,推移千斤顶活塞杆伸出,将工作面输送机推向煤壁。推移距离一般为采煤机1的一个截深;收架将操纵阀打到“收架”位置,高压液体经操纵阀流入立柱的上腔,并同时打开液控单向阀;立柱下腔的液体经液控单向阀、操纵阀后流至回液管,于是立柱回缩,支架高度降低;移架,在支架卸载(收架)或部分卸载后,将操纵阀打到“移架”位置,高压液体进入推移千斤顶右腔;千斤顶左腔低压液体流回回液管路,此时千斤顶缸体带动支架右移。一般其移动的距离与推溜的距离相等。
66.采煤机1设于液压支架上,液压支架包括导轨3和设于导轨3上的若干组支撑架2,液压支架通过移架动作带动采煤机1在导轨3上移动、与不同组的支撑架2连接;液压支架还通过收架动作为采煤机1预留采煤空间,具体的,采煤机1采煤之前、之后都需要液压支架进行支护,而当采煤机1正在采煤时,当前与采煤机1连接的支撑架2需要进行收架动作,为采煤机1留出采煤空间,甚至,下一进程将要连接的支撑架2也需要进行收架动作,以作为准备动作,防止当采煤机1运行至此时来不及及时收架。
67.液压支架与泵站连接,泵站包括若干个泵组,根据液压支架的压力判断开启的泵组的数量。
68.采煤机1上设有位置检测组件,每个支撑架2上设有与位置检测组件相通讯连接的位置接收组件,支撑架2通过位置检测组件和位置接收组件的通讯来感知采煤机1的位置状态,本实用新型提供了两种位置检测组件和位置接收组件的实现方式,一种为红外线检测设备、一种是轴编码器8。
69.每个支撑架2上都设有控制器4,控制器4与位置接收组件连接,当支撑架2上的位置接收组件接收到位置检测组件的位置信号后,由控制器4控制该支撑架2进行收架动作,每个支撑架2单独控制,相互干扰少,出错率小,更加安全。
70.还包括中控集成器,中控集成器与每个支撑架2上的控制器4连接,还与采煤机1 连接,用于控制采煤机1和各个控制器4。采煤机1、每个支撑架2、中控集成器上设有通讯模块,各个通讯模块之间通过5g网络或无线wifi进行通讯。
71.更佳的,当采用轴编码器8为位置检测组件,采用编码数据接收器9为位置接收组件时,采煤机1上还设有红外线发射组件6,每组支撑架2上还设有红外线接收组件7。与轴编码器8配合使用,位置判断相比于单独的红外线检测设备更加精准。
72.较佳的,为了监控支撑架2的各个支撑部的倾角,保证支护安全,每个支撑架2上还设有倾角检测器,用于检测支撑架2的倾角。中控集成器包括报警模块,当倾角检测器检测到的角度超过预设倾角阈值范围内时,则该支撑架2上的控制器4控制该支撑架2 停止动态动作,并向中控集成器的报警模块发送报警信号,提醒才做人员进行关注。
73.较佳的,中控集成器包括第一中控集成器501和第二中控集成器502,第一中控集成器501设于地面,第二中控集成器502设于采煤井内,更佳的设于采煤机内,井下和井上都可以实现控制。为了保证控制安全,当控制器4接收第一中控集成器501的控制信号时,停止接收第二中控集成器502的控制信号;当控制器4接收第二中控集成器502 的控制信号时,则停止接收第一中控集成器501的控制信号,即各控制器4仅受一个中控集成器的支配,不可同时被两个中控集成器支配。
74.较佳的,支撑架2上还设有摄像头,摄像头设于云台上,调节云台的角度使得摄像头拍摄获取支撑架2的各个位置、各个角度的画面,实现对支撑架2的实时视频监控。摄像头与中控集成器连接,中控集成器控制云台旋转,并通过通讯模块将摄像头拍摄的画面发送至中控集成器,供操作人员查看。
75.可以采用红外线发射组件6作为位置检测组件,红外线接收组件7作为位置接收组件,红外线发射组件6的红外线信号发射范围为s1,相邻两支撑架2之间的距离为s2,可以设置s2《s1《2s2。
76.通过相邻两支撑架2之间的红外线信号接收的时间差获取当前采煤机1的位移速度 v。当位移速度v小于第一预设速度,则当前支护的支撑架2的后一组支撑架2进行收架动作;当位移速度v大于第一预设速度且小于第二预设速度,则当前支护的支撑架2的后两组支撑架2进行收架动作;当位移速度v大于第二预设速度,则当前支护的支撑架 2的后三组支撑架2进行收架动作。第一预设速度为采煤机1一分钟经过相邻两支撑架2 之间所需的速度的二分之一,第二预设速度为采煤机1一分钟经过相邻两支撑架2之间所需的速度。根据采煤机1的运行速度来判断一个支撑架2进行收架、还是多个支撑架2 进行收架,当采煤机1的运行速度过快时,为了防止采煤机1运行至此时来不及及时收架则需要多个支撑架2进行收架,更加安全。
77.还可以采用轴编码器8为位置检测组件,用于获取采煤机1的当前位置距起始基点的位移距离s3,采用编码数据接收器9为位置接收组件。编码器数据接收器接收到的位移距离s3与该编码器所对应的支撑架2距起始基点的距离之差为s4,相邻两支撑架2之间的距离为s2,当s2《s4《2s2时,该编码器所对应的支撑架2进行收架动作,即当采煤机1运行至上一支撑架2位置时,进行收架动作。
78.更佳的,当采用轴编码器8为位置检测组件,采用编码数据接收器9为位置接收组件时,采煤机1上还设有红外线发射组件6,每组支撑架2上还设有红外线接收组件7。
79.具体的,与上述红外线检测类似,通过相邻两支撑架2之间的红外线信号接收的时间差获取当前采煤机1的位移速度v:当位移速度v小于第一预设速度,则当前支护的支撑架2的后一组支撑架2进行收架动作;当位移速度v大于第一预设速度且小于第二预设速度,则当前支护的支撑架2的后两组支撑架2进行收架动作;当位移速度v大于第二预设速度,则当前支护的支撑架2的后三组支撑架2进行收架动作。
80.第一预设速度为采煤机1一分钟经过相邻两支撑架2之间所需的速度的二分之一,第二预设速度为采煤机1一分钟经过相邻两支撑架2之间所需的速度。
81.即也通过采煤机1的运行速度来判断一个支撑架2进行收架、还是多个支撑架2进行收架,与轴编码器8配合使用,位置判断相比于单独的红外线检测设备更加精准。
82.采煤面自动找直过程,包括如下步骤:
83.通过设于采煤机1上的惯导获取采煤机1在采煤工作过程中的三维位置数据;
84.根据三维位置数据绘制采煤机1的采煤工作轨迹曲线;
85.在采煤机1的采煤工作过程中以第一预设时间为间隔,持续判断采煤工作轨迹曲线的曲直度是否小于预设曲直阈值,若否,则控制采煤机1的采煤面朝向第一方向或第二方向或第三方向或第四方向移动预设距离。
86.第一方向、第二方向、第三方向、第四方向与采煤机1的前进方向垂直,且第一方向与第二方向相对,第三方向与第四方向相对。可以理解为,第一方向和第二方向分别为采煤机1的左右方向,第三方向和第四方向分别为采煤机1的上下方向。即,控制采煤机1在左、右方向上保持直线,且控制采煤机1在上、下方向上保持直线。当然,第一方向和第二方向也可分别为采煤机1的上下方向,而第三方向和第四方向则分别为采煤机1的左右方向。
87.本实用新型通过惯导可以实时获取采煤机1的三维位置数据,由该三维位置数据可在坐标系上绘制出采煤机1在采煤工作中的移动轨迹曲线,根据该曲线可以直观的判断采煤机1在采煤工作中的移动是否为直线,从而判断出采煤工作面是否为直线,相比于现有技术的通过传感器等来判断采煤工作面是否为直线,本实用新型通过实测数据绘制的曲线来判断,更加准确,可信度高,且使操作人员、监视人员对采煤机1的行程在视觉上更直观,警示性强。
88.具体的,中控集成器包括曲线绘制组件,中控集成器通过该曲线绘制组件来将三维位置数据绘制成采煤工作轨迹曲线。
89.较佳的,采煤机1设于液压支架上,液压支架通过伸缩架动作带动采煤机1移动。伸缩架动作包括左右伸缩带动采煤机1左右移动,还包括上下伸缩带动采煤机1上下移动,从而控制采煤面的上、下、左、右的位置。
90.控制液压支架执行伸缩架动作,则使得采煤机1的采煤面朝向第一方向或第二方向或第三方向或第四方向移动预设距离。
91.需要说明的是,该预设距离可为固定距离,也可根据算法测量曲线的相关参数后计算获取的自动距离。若为固定距离,则可能一次移动并不到位,需要等下一次曲直度判断后再进行位移,直至曲直度是否小于预设曲直阈值。若为自动距离,则可以一步到位,但需要借助算法,并且该算法需要定时进行校正,才可保证算法的准确度。
92.较佳的,当调整距离为移动距离时,一次调整后,停止获取当前采煤工作轨迹曲线的曲率,而是获取起始位置与当前位置的采煤工作轨迹曲线的曲率,判断采煤工作轨迹曲
线的曲直度是否小于预设曲直阈值,若否,则继续控制采煤机1的采煤面朝向第一方向或第二方向或第三方向或第四方向移动第一预设距离,直至起始位置与当前位置的采煤工作轨迹曲线的曲直度小于预设曲直阈值。
93.另外,还可以设置为操作人员手动输入。
94.较佳的,三维位置数据包括经纬度信息和海拔信息,根据该信息可直观的获取采煤机1的三维地理位置数据,不受地下采煤井深的影响。
95.较佳的,由于采煤机1故障、液压支架故障等故障可能会导致采煤机1的采煤面一直无法在同一直线上工作,又或是当地质异常、存在干扰物的情况下,也会导致采煤面一直无法在同一直线上工作。
96.故需要在采煤机1在采煤工作过程中以第一预设时间为间隔,持续判断采煤工作轨迹曲线的曲直度是否小于预设曲直阈值,若否,则控制采煤机1的采煤面朝向第一方向或第二方向或第三方向或第四方向移动预设距离的同时,累计控制采煤机1的采煤面朝向第一方向或第二方向或第三方向或第四方向移动的次数c,当c大于预设次数,则发出采煤机1故障提示信息或请求地质勘探。
97.即,当采煤机1的采煤面持续多次调整位置时,则发出提示、警示操作人员进行设备判断或是地质判断。
98.另外,还可以设置更加精确的判断,即在时间段内进行判断,给定一预设时间段,若该预设时间段内采煤机1的调整次数c大于预设次数,则发出采煤机1故障提示信息或请求地质勘探。但若采用该种判断方法,可能会导致较多的无效提示,即提示信息为正常情况,并不对应故障或地质异常情况。
99.具体的,中控集成器还包括计数组件,计数组件累计采煤机1的采煤面朝向第一方向或第二方向或第三方向或第四方向移动的次数c。
100.较佳的,在一种情况下,采煤面位置调整时采煤工作停止,等采煤面回到正常位置了才会继续采煤工作,而另一种情况下,采煤面位置调整时采煤工作同时进行,而若此时保持正常采煤速度,可能会导致调整精度的误差,故在控制采煤机1的采煤面朝向第一方向或第二方向或第三方向或第四方向移动的同时,减小采煤机1的前进方向的移动速度,在调整完成以后再回复正常的速度。
101.应当注意的是,本实用新型的实施例有较佳的实施性,且并非对本实用新型作任何形式的限制,任何熟悉该领域的技术人员可能利用上述揭示的技术内容变更或修饰为等同的有效实施例,但凡未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所作的任何修改或等同变化及修饰,均仍属于本实用新型技术方案的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。