技术特征:
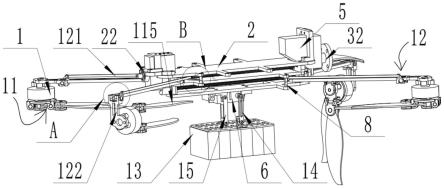
1.一种球形陆空两栖机器人,其特征在于,包括空中飞行模块、地面滚动模块和支撑模块;所述空中飞行模块包括电机臂和桨叶(115),所述电机臂分为伸缩式的电机臂支撑段(121)和与桨叶(115)连接的电机臂旋转段(122);所述电机臂支撑段(121)与电机臂旋转段(122)之间通过折臂机构(12)连接,电机臂旋转段(122)可通过折臂机构(12)旋转;所述电机臂旋转段(122)与桨叶(115)之间通过收桨机构(11)转动连接;所述地面滚动模块包括球形壳体(9),球形壳体(9)内设有分别驱动机器人地面滚动和转向的中心转轴和摆块(13),所述中心转轴与球形壳体(9)的水平中心轴共线;球形壳体(9)上开设有供电机臂伸出至球形壳体(9)外侧或收回至球形壳体(9)内侧的窗体(16);所述支撑模块包括位于中心转轴和摆块(13)之间的多层中心板,相邻中心板之间设有与电机臂支撑段(121)连接的伸缩组件;所述伸缩组件连接于电机臂支撑段(121)远离折臂机构(12)的一端并可驱动电机臂支撑段(121)在窗体(16)处伸缩。2.根据权利要求1所述的球形陆空两栖机器人,其特征在于,所述中心板包括与中心转轴平行设置的第一层中心板(2)、第二层中心板(3)和第三层中心板(4),第一层中心板(2)、第二层中心板(3)和第三层中心板(4)的两侧端分别通过轴承座一(26)和轴承座二(27)连接;所述伸缩组件包括位于第一层中心板(2)与第二层中心板(3)之间的丝杠一(123)、位于第二层中心板(3)和第三层中心板(4)之间的丝杠二(124),丝杠一(123)和丝杠二(124)的两端均分别连接于轴承座一(26)和轴承座二(27)上;所述丝杠一(123)和丝杠二(124)上分别螺纹连接有反向螺母一(7a)和反向螺母二(7b);所述电机臂包括位于中心转轴轴向两侧的两组,两组电机臂分别与反向螺母一(7a)和反向螺母二(7b)连接。3.根据权利要求2所述的球形陆空两栖机器人,其特征在于,所述丝杠一(123)的轴端一和丝杠二(124)的轴端一均穿过轴承座一(26)并分别连接有齿轮一(261)和齿轮二(262),所述丝杠一(123)由减速电机(25)驱动旋转;丝杠一(123)旋转时带动齿轮一(261)同向旋转、齿轮一(261)带动齿轮二(262)及丝杠二(124)反向旋转;同时反向螺母一(7a)和反向螺母二(7b)分别在丝杠一(123)和丝杠二(124)上朝相反的方向平动并带动两组电机臂伸缩。4.根据权利要求3所述的球形陆空两栖机器人,其特征在于,所述两组电机臂均包括对称设置的电机臂一(17)和电机臂二(18),两组电机臂一(17)和电机臂二(18)的电机臂支撑段(121)分别连接于反向螺母一(7a)和反向螺母二(7b)的径向两端;所述电机臂支撑段(121)上沿长度方向设有导向槽口(121a),电机臂一(17)和电机臂二(18)的导向槽口(121a)上卡接有导向滑块(20),导向滑块(20)的两端分别设有可卡接在电机臂一(17)和电机臂二(18)的导向槽口(121a)中的导向轴(263),当反向螺母一(7a)和反向螺母二(7b)分别朝轴承座一(26)和轴承座二(27)方向平动时,两组电机臂一(17)和电机臂二(18)均通过导向槽口(121a)沿着导向轴(263)向两侧张开并伸出至窗体(16)外侧。5.根据权利要求1-4中任一项所述的球形陆空两栖机器人,其特征在于,所述收桨机构(11)包括与电机臂旋转段(122)连接的收桨驱动件(1)和与收桨驱动件(1)连接的桨夹底座(111),桨夹底座(111)上通过收桨转轴(114)转动连接有桨夹(112),桨叶(115)通过桨夹轴
(113)连接在桨夹(112)上;所述收桨转轴(114)与桨夹底座(111)之间设有收桨扭簧,当收桨驱动件(1)停转后,通过桨叶(115)的自重及收桨扭簧提供的辅助扭力,使桨夹(112)带动桨叶(115)绕收桨转轴(114)运动至与电机臂支撑段(121)平行的位置并位于电机臂支撑段(121)的正下方。6.根据权利要求5所述的球形陆空两栖机器人,其特征在于,所述折臂机构(12)包括折臂拉片(125)和固定连接于折臂拉片(125)上的折臂转轴(127);所述折臂转轴(127)与电机臂旋转段(122)固定连接、与电机臂支撑段(121)转动连接,折臂转轴(127)可带动电机臂旋转段(122)相对于电机臂支撑段(121)旋转90
°
;所述折臂转轴(127)与电机臂支撑段(121)之间设有折臂扭簧,初始状态时,通过折臂扭簧使得电机臂旋转段(122)与电机臂支撑段(121)保持垂直。7.根据权利要求6所述的球形陆空两栖机器人,其特征在于,所述第一层中心板(2)与第二层中心板(3)之间靠近轴承座一(26)处、第二层中心板(3)与第三层中心板(4)之间靠近轴承座二(27)处均设有包括连接孔(30)的中心竖板(8);所述折臂拉片(125)上还转动连接有与中心竖板(8)活动连接的折臂拉杆(126);所述折臂拉杆(126)穿过中心竖板(8)的连接孔(30)并可随着电机臂支撑段(121)在连接孔(30)内伸缩,折臂拉杆(126)位于中心竖板(8)内侧的端部设有可限位于连接孔(30)内的限位凸台(19);当折臂拉杆(126)随着电机臂支撑段(121)运动到极限位置时,折臂拉杆(126)通过限位凸台(19)止挡于中心竖板(8)上,同时折臂拉杆(126)带动折臂拉片(125)及折臂转轴(127)旋转,并使得电机臂旋转段(122)转动至与电机臂支撑段(121)平行的位置。8.根据权利要求7所述的球形陆空两栖机器人,其特征在于,所述中心转轴的两端与球形壳体(9)连接,中心转轴包括共线的主动轴(32)和从动轴(22);所述第一层中心板(2)上在位于轴承座二(27)的一侧设有驱动主动轴(32)旋转的滚动舵机(5),第一层中心板(2)上在位于轴承座一(26)的一侧设有用于支撑从动轴(22)的从动轴轴承座;通过滚动舵机(5)驱动主动轴(32)转动并带动球型壳体(9)及从动轴(22)运动来实现机器人的地面滚动。9.根据权利要求8所述的球形陆空两栖机器人,其特征在于,所述第三层中心板(4)下端设有相互平行的摆臂一(14)及摆臂二(15)、固定于摆臂一(14)和摆臂二(15)下端以用于转向的摆块(13);通过转向舵机(6)驱动摆臂一(14)摆动,摆臂二(15)随动,通过摆臂一(14)和摆臂二(15)改变摆块(13)的位置来改变机器人的整体中心并实现转向。10.根据权利要求9所述的球形陆空两栖机器人,其特征在于,所述球形壳体(9)的两侧分别开设有两个与两组电机臂匹配的窗体(16),当电机臂从球形壳体(9)内伸出并推开窗体(16)后,通过电机臂的上端面对窗体(16)限位;所述窗体(16)与球形壳体(9)之间设有开合旋转轴,所述开合旋转轴与球形壳体(9)之间设有开合扭簧以辅助初始状态下窗体(16)稳定闭合。
技术总结
本发明涉及机器人技术领域,具体提供一种球形陆空两栖机器人,包括空中飞行模块、地面滚动模块和支撑模块;空中飞行模块包括电机臂和桨叶;地面滚动模块包括球形壳体、驱动机器人地面滚动和转向的中心转轴和摆块;支撑模块中心板。该机器人可实现地面滚动、空中飞行及两种运动模式的自主切换;当进行地面运动时,可通过滚动舵机和转向舵机实现直线滚动与转向,具备一定的越障能力;当进行空中运动时,可通过收桨机构保证从飞行模式切换至地面模式时桨叶自动回收,解决了收桨困难和执行机构繁琐的问题;还可通过折臂机构在进入飞行模式时,辅助电机臂顺利张开。辅助电机臂顺利张开。辅助电机臂顺利张开。
技术研发人员:杨生 崔雪锴 白越 裴信彪 乔正 许嘉慧
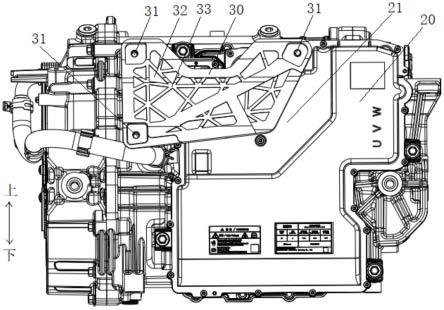
受保护的技术使用者:长春长光博翔无人机有限公司
技术研发日:2022.09.21
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。