1.本技术涉及软体机器人技术领域,具体而言,涉及一种月面软体机器人和一种月面软体机器人的运动方法。
背景技术:
2.地月距离、复杂环境、人员安全和长期驻留成本等因素,决定了机器人是月球探测和开发的主要工具。目前的月面软体机器人多以刚性结构为主,导致其柔顺性、灵活性、环境适应性均较差。而与之相对的软体机器人,由可承受大应变的柔软弹性材料制成,可连续变形,有无限多自由度,因此运动灵活,环境适应性好,安全性高,且易于小型轻质化,有助于节约运载器发射成本。
3.然而,大多数气动软体机器人的运动方式单一,地形适应能力有限,且多采用爬行的运动方式。但是与爬行方式相比,跳跃方式可以更好地利用月球的低重力,越障能力强,能适应更加崎岖的地形环境。不过跳跃运动无法对两个落点之间的区域进行探测,同时无法在月面狭缝或矮洞中运动。
4.因此,有必要研究一种新的月面软体机器人以及月面软体机器人的运动方法。
5.需要说明的是,在上述背景技术部分公开的信息仅用于加强对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
6.本技术的目的在于克服上述现有技术的不足,提供一种月面软体机器人和一种月面软体机器人的运动方法,该月面软体机器人中的气动驱动器能够在低密度输出和高密度输出之间切换,使得月面软体机器人能够爬行和跳跃,更加适用于月面复杂环境。
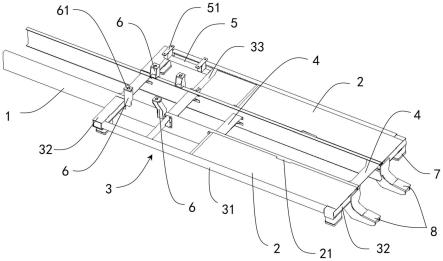
7.根据本技术的一个方面,提供了一种月面软体机器人,包括:主体,由闭合弹性体、第一正压式气动驱动器和第二正压式气动驱动器组成,所述闭合弹性体包括一根弹性条和一个约束框架,所述第一正压式气动驱动器和所述第二正压式气动驱动器分别固定于所述弹性条的上表面和下表面;多个爬行足部,分别固定于所述约束框架的第一支撑杆和与所述第一支撑杆平行的第二支撑杆上,所述爬行足部随所述第一正压式气动驱动器的充放气而带动所述月面软体机器人爬行;跳腿,固定于所述弹性条的下表面,且与所述第二正压式气动驱动器的覆盖位置不重叠,所述跳腿随所述第二正压式气动驱动器的充气而带动所述月面软体机器人跳跃。
8.在本技术的一种示例性实施例中,所述约束框架还包括等长且无弹性的第一柔性绳和第二柔性绳,所述第一柔性绳和所述第二柔性绳通过所述第一支撑杆和所述第二支撑杆上的线槽固定所述第一支撑杆和所述第二支撑杆。
9.在本技术的一种示例性实施例中,所述弹性条的长度大于所述约束框架的长度,且所述弹性条的两端分别固定于所述第一支撑杆和所述第二支撑杆的正中间。
10.在本技术的一种示例性实施例中,所述第一正压式气动驱动器和第二正压式气动驱动器的弹性模量小于所述弹性条的弹性模量,并且所述第一正压式气动驱动器和第二正压式气动驱动器包括一气管和多个内部连通的气动腔体。
11.在本技术的一种示例性实施例中,所述第一正压式气动驱动器固定于所述弹性条上表面的正中间,所述第二正压式气动驱动器固定于所述弹性条下表面靠近所述第一支撑杆的位置。
12.在本技术的一种示例性实施例中,所述多个爬行足部包括两个第一爬行足部和两个第二爬行足部,所述第一爬行足部分别固定于所述第一支撑杆的两端,所述第二爬行足部分别固定于所述第二支撑杆的两端。
13.在本技术的一种示例性实施例中,所述第一爬行足部、所述第二爬行足部和所述跳腿均为“l”构型,并且所述第一爬行足部和所述第二爬行足部的折角处指向所述第一支撑杆,所述跳腿的折角处指向所述第二支撑杆。
14.在本技术的一种示例性实施例中,所述爬行足部的足面粘附有硅胶垫,并且所述硅胶垫超出所述足面的边缘。
15.根据本技术的一个方面,提供了一种月面软体机器人的运动方法,应用于上述实施例所述的月面软体机器人,所述方法包括:对所述第一正压式气动驱动器充气和放气,以使所述月面软体机器人向前爬行;对所述第二正压式气动驱动器充气,以使所述月面软体机器人向前跳跃。
16.在本技术的一种示例性实施例中,所述对所述第一正压式气动驱动器充气和放气,以使所述月面软体机器人向前爬行,包括:对所述第一正压式气动驱动器充气,以增大固定于所述第一支撑杆上的所述爬行足部与接触面之间的摩擦力,并带动固定于所述第二支撑杆上的所述爬行足部向前滑动;对所述第一正压式气动驱动器放气,以增大固定于所述第二支撑杆上的所述爬行足部与接触面之间的摩擦力,并带动固定于所述第一支撑杆上的所述爬行足部向前滑动,直至所述主体恢复至稳定状态。
17.在本技术的一种示例性实施例中,所述对所述第二正压式气动驱动器充气,以使所述月面软体机器人向前跳跃,包括:对所述第二正压式气动驱动器持续充气,以使所述弹性条下翻,并驱使所述跳腿在接触面的反作用力下向前跳跃。
18.在本技术的一种示例性实施例中,所述方法还包括:在所述月面软体机器人完成跳跃并落地后,对所述第一正压式气动驱动器充气,同时对所述第二正压式气动驱动器放气,以使所述月面软体机器人恢复至稳定状态。
19.本技术中的月面软体机器人,具有主体、多个爬行足部和跳脚,其中主体由闭合弹性体、第一正压式气动驱动器和第二正压式气动驱动器组成,闭合弹性体包括一根弹性条和一个约束框架,并且第一正压式气动驱动器和第二正压式气动驱动器分别固定于弹性条的上表面和下表面;多个爬行足部,分别固定于约束框架的第一支撑杆和与第一支撑杆平行的第二支撑杆上,并且爬行足部随所述第一正压式气动驱动器的充放气而带动所述月面软体机器人爬行;跳腿,固定于弹性条的下表面,且与第二正压式气动驱动器的覆盖位置不重叠,跳腿随第二正压式气动驱动器的充气而带动月面软体机器人跳跃。本技术中的月面
软体机器人是一个既能爬行又能跳跃的适用于月面复杂环境的软体机器人,同时月面软体机器人通过单双稳态于一体的刚柔耦合设计,将闭合弹性体和正压式气动驱动器相结合,突破了气动驱动器的低密度输出限制,使得气动驱动器具有在低密度输出和高密度输出之间切换的能力,进一步提升了月面软体机器人的性能,使得月面软体机器人具有结构简单、小型轻质、运动灵活、地面适应能力强,并且控制方便的优点。
20.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
21.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1示意性示出了本技术实施例中月面软体机器人的结构示意图。
23.图2示意性示出了本技术实施例中约束框架的结构示意图。
24.图3示意性示出了本技术实施例中约束框架中第一支撑杆和第二支撑杆相向运动的界面示意图。
25.图4示意性示出了本技术实施例中正压式气动驱动器的结构示意图。
26.图5示意性示出了本技术实施例中仿猎豹脊柱的双稳态运动模式的状态变化示意图。
27.图6示意性示出了本技术实施例中月面软体机器人的运动方法的流程示意图。
28.图7示意性示出了本技术实施例中月面软体机器人向前爬行的界面示意图。
29.图8a-8c示意性示出了本技术实施例中月面软体机器人向前跳跃的界面示意图。
30.附图标记说明:101:主体;102:多个爬行足部;102-1:第一爬行足部;102-2:第二爬行足部;103:跳腿;104:闭合弹性体;104-1:弹性条;104-2:约束框架;105:第一正压式气动驱动器;106:第二正压式气动驱动器;107:硅胶垫;l1:第一支撑杆;l2:第二支撑杆;201:第一柔性绳;202:第二柔性绳;203:线槽;401:气管;402:气动腔体。
具体实施方式
31.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本技术将全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。图中相同的附图标记表示相同或类似的结构,因而将省略它们的详细描述。此外,附图仅为本技术的示意性图解,并非一定是按比例绘制。
32.在本领域的相关技术中,软体机器人驱动方式中,气动驱动更适合用于月面环境,但是大多数气动软体机器人的运动方式单一,地形适应能力有限,而且由于材料和结构的柔韧性,以及气体的粘滞性,导致气动软体机器人的响应速度和输出力较低,因而多采用爬行的运动方式。爬行方式可以实现精确移动,并能适应月球上的斜坡和裂缝地形,但其跨越
月球陨石坑和岩石等障碍物的能力有限。与爬行方式相比,跳跃方式可以更好地利用月球的低重力,越障能力强,能适应更加崎岖的地形环境。不过跳跃运动无法对两个落点之间的区域进行探测,同时无法在月面狭缝或矮洞中运动。
33.针对相关技术中存在的问题,本技术实施例中首先提供了一种月面软体机器人,图1示出了月面软体机器人的结构示意图,如图1所示,月面软体机器人100包括主体101、多个爬行足部102和跳腿103,其中,主体101由闭合弹性体104、第一正压式气动驱动器105和第二正压式气动驱动器106组成,闭合弹性体104包括一根弹性条104-1和一个约束框架104-2,并且,第一正压式气动驱动器105和第二正压式气动驱动器106分别固定于弹性条104-1的上表面和下表面;多个爬行足部102,分别固定于约束框架104-2的第一支撑杆l1和与第一支撑杆l1平行的第二支撑杆l2上,多个爬行足部102随第一正压式气动驱动器105的充放气而带动月面软体机器人100爬行;跳腿103,固定于弹性条104-1的下表面,且与第二正压式气动驱动器106的覆盖位置不重叠,跳腿103随第二正压式气动驱动器106的充气而带动月面软体机器人100跳跃。
34.在本技术的一个实施例中,弹性条104-1为具有高弹性的弹性条,例如可以是高弹性的65mn弹簧钢条,还可以是高弹性的碳纤维弹性条,当然还可以是其它材料制成的具有高弹性的弹性条。在本技术的实施例中,弹性条104-1的长度大于约束框架104-2的长度,并且弹性条104-1的两端分别固定在约束框架的第一支撑杆l1和第二支撑杆l2的正中间,这样弹性条104-1的初始状态是向上弯曲的形状,对应着月面软体机器人的一个稳态,其中弹性条在约束框架中的固定方式具体可以是扦插和胶粘加固的方式,具体而言,可以在第一支撑杆l1和第二支撑杆l2的正中间设置可插入弹性条端部的插口,在将弹性条端部插入插口后,再注入胶以进行固定,当然还可以采用其它的固定方式,只要保证弹性条在任何情形下都能够牢固固定在约束框架上即可。
35.图2示出了约束框架的结构示意图,如图2所示,约束框架104-2包括第一支撑杆l1、第二支撑杆l2,还包括等长的第一柔性绳201和第二柔性绳202,第一柔性绳201和第二柔性绳202通过第一支撑杆l1和第二支撑杆l2两端的线槽203固定第一支撑杆l1和第二支撑杆l2,由于第一柔性绳201和第二柔性绳202被线槽203约束,因此可以防止第一柔性绳201和第二柔性绳202在第一支撑杆l1和第二支撑杆l2上滑动。在本技术的实施例中,第一柔性绳201和第二柔性绳202可以是诸如棉质、尼龙等材质的不可拉伸的柔性绳,例如可以是不可拉伸的鱼线,等等,这样使得第一支撑杆l1和第二支撑杆l2可以相向运动,但是不能实现超出柔性绳长度的相背运动,如图3所示,随着第一柔性绳201和第二柔性绳202的收缩,第一支撑杆l1和第二支撑杆l2相向运动。
36.图4示出了正压式气动驱动器的结构示意图,如图4所示,正压式气动驱动器包括气管401和气动腔体402,气管401位于正压式气动驱动器的一端,如图4中所示的左端,用于对正压式气动驱动器进行充气和放气,气动腔体402的内部具有多个连通腔体,呈凹凸结构,当通过气管401充气时,气动腔体402内部压强增大从而膨胀变形,当通过气管401放气时,气动腔体402内部压强减小从而缩小变形。在本技术的实施例中,气管401还可以设置于正压式气动驱动器的右侧或其它位置,本技术实施例对此不作具体限定。
37.在本技术的一个实施例中,第一正压式气动驱动器105和第二正压式气动驱动器106为由弹性材料制成的气体驱动器,制成第一正压式气动驱动器105的弹性材料和制成第
二正压式气动驱动器106的弹性材料可以相同,也可以不同,例如可以都是硅胶材料,也可以是其它不同的弹性材料。但是无论是相同还是不同的弹性材料,该弹性材料的弹性模量均小于弹性条104-1的弹性模量。在本技术实施例中,通过对第一正压式气动驱动器105和第二正压式气动驱动器106进行充放气,气动腔体发生形变,同时使弹性条104-1发生形变,并带动约束框架发生变化,进而可以改变月面软体机器人100的状态,使得月面软体机器人100兼有爬行和跳跃两种运动模式。
38.在本技术的一个实施例中,第一正压式气动驱动器105和第二正压式气动驱动器106可以通过胶接等方式固定在弹性条104-1的上表面和下表面,并且第一正压式气动驱动器105、第二正压式气动驱动器106和弹性条104-1轴线方向重合。为了保证月面软体机器人能够在第一正压式气动驱动器105和第二正压式气动驱动器106的充放气作用下完成爬行和跳跃,本技术实施例中第一正压式气动驱动器105固定于弹性条104-1上表面的正中间,第二正压式气动驱动器106固定于弹性条104-1下表面的靠近第一支撑杆l1的位置,并且第一正压式气动驱动器105和第二正压式气动驱动器106在弹性条104-1上的覆盖位置存在部分重叠。在本技术的实施例中,第一正压式气动驱动器105的长度越接近弹性条的长度越好,也就是说,第一正压式气动驱动器105的两端越接近第一支撑杆和第二支撑杆越好,这样即使在施加于第一正压式气动驱动器105上的驱动力较小的情况下,也能很好地对弹性条进行驱动。第二正压式气动驱动器106越接近第一支撑杆越好,这样可以通过对第二正压式气动驱动器106充气将弹性条从初始稳态转变为下凹的稳态,进而使得弹性条靠近第二支撑杆的部分在跳腿上施加脉冲力,并使跳腿在接触面的反作用力下带动月面软体机器人向前跳跃。
39.在本技术的一个实施例中,当向第一正压式气动驱动器105充气时,气动腔体会膨胀发生轴向伸长变形,但由于弹性条的弹性模量较大,使得第一正压式气动驱动器105向着弹性条104-1的方向弯曲,同时驱动弹性条104-1上和第一正压式气动驱动器105相连的部分产生相应变形,比如向上凸起;当对第一正压式气动驱动器105放气时,弹性条逐渐恢复至初始状态。
40.在本技术的一个实施例中,通过对第一正压式气动驱动器105充放气,可以控制约束框架进行相向运动和相背运动,进而带动月面软体机器人实现仿尺蠖的单稳态运动模式。具体地,当弹性条104-1上方的第一正压式气动驱动器105充气时,弹性条104-1继续向上拱起,约束框架104-2两端向内收缩;接着对弹性条104-1上方的第一正压式气动驱动器105放气,约束框架104-2两端在弹性条104-1的恢复力作用下相背运动,此时月面软体机器人处于仿尺蠖的单稳态运动模式。
41.同样地,当向第二正压式气动驱动器106充气时,气动腔体会膨胀发生轴向伸长变形,但由于弹性条的弹性模量较大,使得第一正压式气动驱动器105向着弹性条104-1的方向弯曲,同时驱动弹性条104-1上和第二正压式气动驱动器106相连的部分产生相应变形,比如向下凹。随着第二正压式气动驱动器106的持续充气,弹性条104-1从向上弯曲转变为向下弯曲,当对第二正压式气动驱动器106放气,并对第一正压式气动驱动器105充气,可以驱动弹性条104-1转变为初始状态。
42.在本技术的一个实施例中,通过对第二正压式气动驱动器106充气,可以通过跳腿带动月面软体机器人向前跳跃,同时通过对第一正压式气动驱动器105充气,并对第二正压
式气动驱动器106放气,可以将月面软体机器人从一个稳态转变为另一个稳态,实现仿猎豹脊柱的双稳态运动模式。
43.图5示出了仿猎豹脊柱的双稳态运动模式的状态变化示意图,如图5所示,月面软体机器人初始状态对应第一稳态,此时弹性条向上弯曲;当对固定于弹性条104-1下表面的第二正压式气动驱动器106充气时,弹性条104-1前面部分会向内凹,弯曲储能,月面软体机器人此时处于第一失稳状态;进一步驱动时,继续对第二正压式气动驱动器106充气,弹性条104-1发生突跳瞬间向下翻转,从向上弯曲变为向下弯曲,突变到月面软体机器人的第二稳态,这个过程中,弹性条104-1的后半部会快速释放一个脉冲力;为了将月面软体机器人恢复到初始状态,接着对固定于弹性条104-1下表面的第二正压式气动驱动器106放气,并对固定于弹性条104-1上表面的第一正压式气动驱动器105充气,在这个过程中,弹性条104-1处于第二失稳状态,当完成对第二正压式气动驱动器106的放气和对第一正压式气动驱动器105的充气后,弹性条104-1恢复到初始状态,此时月面软体机器人处于第一稳态。
44.在本技术的一个实施例中,第一正压式气动驱动器105和第二正压式气动驱动器106具体可以是正压式多腔气囊驱动器,还可以是纤维增强型气动驱动器,当然还可以是其它类型的正压式气动驱动器,本技术实施例对此不作具体限定。
45.月面软体机器人的爬行和跳跃是基于爬行足部和跳腿实现的,接下来对本技术中的爬行足部和跳腿的构成进行说明。
46.在本技术的一个实施例中,多个爬行足部为摩擦各向异性的爬行足部,并且多个爬行足部分别固定在第一支撑杆l1和第二支撑杆l2上,如图1所示,多个爬行足部102包括两个第一爬行足部102-1和两个第二爬行足部102-2,其中,两个第一爬行足部102-1固定在第一支撑杆l1的两端,两个第二爬行足部102-2固定在第二支撑杆l2的两端,具体的固定方式可以是扦插和胶粘加固方式,当然还可以是其它的固定方式,本技术实施例对此不作具体限定。在本技术的实施例中,多个爬行足部102具有“l”构型,并且第一爬行足部102-1和第二爬行足部102-2的折角处指向第一支撑杆l1,在本技术中将第一支撑杆l1定义为前端,第二支撑杆l2定义为后端,那么通过设置爬行足部折角处指向第一支撑杆l1,并结合第一正压式气动驱动器105的充放气可以实现月面软体机器人的向前爬行。当然,第一爬行足部102-1和第二爬行足部102-2的折角处还可以指向第二支撑杆l2,这样在对第一正压式气动驱动器105充放气过程中可以实现月面软体机器人的向后爬行。
47.在本技术的一个实施例中,跳腿103也是“l”构型,并且跳腿103的折角处指向第二支撑杆l2,跳腿103用于在接触面的反作用力作用下带动月面软体机器人向前跳跃,月面软体机器人的向前跳跃不仅仅是向正前方跳跃,还可以是向斜前方跳跃,具体可以通过改变跳腿的姿态实现。
48.值得说明的是,多个爬行足部102和跳腿103还可以具有其它构型,例如还可以是倒“t”型等等,本技术实施例对此不作具体限定。
49.进一步地,在多个爬行足部102和跳腿103的足面上还粘附有硅胶垫,如图1中所示的硅胶垫107,在“l”构型的爬行足部和跳腿的足面上粘附有硅胶垫107,该硅胶垫107在足面上略微伸出一点,这样可以提高爬行足部和跳腿与接触面之间的摩擦力,方便月面软体机器人向前爬行和向前跳跃。
50.如上述实施例中所述,随着月面软体机器人状态的变化,多个爬行足部102和跳腿
103可以带动着月面软体机器人向前爬行和向前跳跃。相应地,本技术实施例还公开了一种月面软体机器人的运动方法,图6示出了月面软体机器人的运动方法的流程示意图,如图6所示,该方法至少包括步骤s601-s602:在步骤s601中,对所述第一正压式气动驱动器充气和放气,以使所述月面软体机器人向前爬行;在步骤s602中,对所述第二正压式气动驱动器充气,以使所述月面软体机器人向前跳跃。
51.本技术中的月面软体机器人的运动方法,通过对月面软体机器人中固定于弹性条上表面的第一正压式气动驱动器进行充放气,以使月面软体机器人向前爬行,通过对月面软体机器人中固定于弹性条下表面的第二正压式气动驱动器进行充气,以使月面软体机器人向前跳跃。本技术中的月面软体机器人既能在单稳态模式下完成仿尺蠖的爬行运动,又能在双稳态模式下完成仿猎豹的跳跃运动,运动灵活,地形适应能力强,并且只需分别对弹性条上表面和下表面的正压式多腔气囊驱动器进行充放气,即可完成相应的爬行和跳跃运动,操作简单,控制方便,动作可靠。
52.接下来,对本技术实施例中的月面软体机器人的运动方法进行详细说明:在步骤s601中,对所述第一正压式气动驱动器充气和放气,以使所述月面软体机器人向前爬行。
53.在本技术的一个实施例中,通过对第一正压式气动驱动器105充气,以增大固定于第一支撑杆l1上的爬行足部与接触面之间的摩擦力,并带动固定于第二支撑杆l2上的爬行足部向前滑动;同时通过对第一正压式气动驱动器105放气,以增大固定于第二支撑杆l2上的爬行足部与接触面之间的摩擦力,并带动固定于第一支撑杆l1上的爬行足部向前滑动,直至月面软体机器人的主体恢复至稳定状态。
54.图7示意性示出了月面软体机器人向前爬行的界面示意图,如图7所示,首先,对固定于弹性条104-1上表面的第一正压式气动驱动器105充气,第一正压式气动驱动器105向下弯曲带动弹性条104-1继续向上拱起,约束框架104-2两端相向运动,此时第一爬行足部102-1足面的硅胶垫与接触面相互作用的摩擦力较大,使第一爬行足部102-1锚定,第二爬行足部102-2摩擦力较小,从而向前滑动;接着,对弹性条104-1上表面的第一正压式气动驱动器105进行放气,弹性条104-1在弹力的作用下恢复形变,约束框架104-2两端相背运动,此时第二爬行足部102-2足面的硅胶垫与支撑面相互作用,导致第二爬行足部102-2的摩擦力大于第一爬行足部102-1的摩擦力,使得月面软体机器人的第二爬行足部102-2锚定支撑面,第一爬行足部102-1向前滑动,月面软体机器人的主体101恢复至初始状态,月面软体机器人完成一个周期的向前爬行动作。
55.在步骤s602中,对所述第二正压式气动驱动器充气,以使所述月面软体机器人向前跳跃。
56.在本技术的一个实施例中,通过对第二正压式气动驱动器106持续充气,以使弹性条104-1下翻,并驱使跳腿103在接触面的反作用力下向前跳跃。
57.图8a-8c示出了月面软体机器人向前跳跃的界面示意图,如图8a所示,月面软体机器人处于第一稳态;如图8b所示,对弹性条104-1下方的第二正压式气动驱动器106充气,第二正压式气动驱动器106弯曲带动弹性条104-1前面部分向内凹,弯曲储能,使月面软体机
器人处于失稳状态;如图8c所示,对第二正压式气动驱动器106继续充气,弹性条104-1发生突跳,瞬间向下翻转,突变到第二稳态,此时弹性条104-1的后半部会快速释放一个脉冲力,并通过跳腿直接作用于接触面,转化为月面软体机器人向斜上方跳跃的弹跳力。
58.进一步地,当月面软体机器人完成跳跃并落地之后,对弹性条104-1下表面的第二正压式气动驱动器106放气并对弹性条104-1上表面的第一正压式气动驱动器105充气,使月面软体机器人的主体101恢复到初始状态,月面软体机器人完成一个周期的向前跳跃动作。
59.本技术实施例中的月面软体机器人可以在第一正压式气动驱动器的充放气过程中向前爬行,在第二正压式气动驱动器的充气过程中向前跳跃,是一个既能爬行又能跳跃的适用于月面复杂环境的软体机器人,例如当需要跨越月球陨石坑和岩石等障碍时,可以启用月面软体机器人的跳跃模式,即仿猎豹脊柱的双稳态运动模式,当需要对跳跃落点支架的区域进行探测、在月面狭缝或矮洞中运动时,可以启用月面软体机器人的爬行模式,即仿尺蠖的单稳态运动模式。同时月面软体机器人是基于闭合弹性体和正压式气动驱动器构建的单双稳态于一体的刚柔耦合设计,突破了气动驱动器的低密度输出限制,使得气动驱动器具有在低密度输出和高密度输出之间切换的能力,进一步提升了月面软体机器人的性能,使得月面软体机器人具有结构简单、小型轻质、运动灵活、地面适应能力强、控制方便等优点。
60.值得说明的是,本技术实施例中的低密度输出和高密度输出包括两类输出,一类是能量密度输出,一类是功率密度输出,其中能量密度输出由气动驱动器的输出能量和气动驱动器的质量之比表征,功率密度输出由响应速度表征,在仅采用单一气动驱动器时,通常输出能量低、响应速度慢,但是本技术中的月面软体机器人,在弹性条上下表面分别固定有正压式气动驱动器,通过对上表面的正压式气动驱动器进行驱动,输出力低、响应速度慢,能够实现低密度输出,对下表面的正压式气动驱动器,输出力高、响应速度快,能够实现高密度输出,因此本技术中的月面软体机器人能够实现气动驱动器在低密度输出和高密度输出之间的切换能力。
61.需要说明的是,尽管在附图中以特定顺序描述了本技术中的月面软体机器人运动方法的各个步骤,但是,这并非要求或者暗示必须按照该特定顺序来执行这些步骤,或是必须执行全部所示的步骤才能实现期望的结果。附加的或备选的,可以省略某些步骤,将多个步骤合并为一个步骤执行,以及/或者将一个步骤分解为多个步骤执行等。
62.虽然本说明书中使用相对性的用语,例如“上”“下”来描述图标的一个组件对于另一组件的相对关系,但是这些术语用于本说明书中仅出于方便,例如根据附图中所述的示例的方向。能理解的是,如果将图标的装置翻转使其上下颠倒,则所叙述在“上”的组件将会成为在“下”的组件。当某结构在其它结构“上”时,有可能是指某结构一体形成于其它结构上,或指某结构“直接”设置在其它结构上,或指某结构通过另一结构“间接”设置在其它结构上。
63.用语“一个”、“一”、“该”、“所述”和“至少一个”用以表示存在一个或多个要素/组成部分/等;用语“包括”和“具有”用以表示开放式的包括在内的意思并且是指除了列出的要素/组成部分/等之外还可存在另外的要素/组成部分/等;用语“第一”、“第二”和“第三”等仅作为标记使用,不是对其对象的数量限制。
64.在本技术中,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连。“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
65.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本技术的真正范围和精神由所附的权利要求指出。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。