1.本发明涉及机器人测量技术领域,具体涉及一种用于机械臂产品的重复定位精度测试台及测试方法。
背景技术:
2.目前,随着工业自动化和机器人的迅速发展,机械臂产品在各行各业的应用逐渐增多。重复定位精度是衡量机械臂性能的一项重要指标,关于重复定位精度的测量目前分为接触式的测量方案和非接触式的测量方案。其中接触式的测量方案是利用位移计去接触靶球,通过多次接触靶球来得到机械臂的重复定位精度。这种方式对靶球的精度要求高,容易划伤和碰伤靶球,测试数据单一、测试过程复杂,无法得到机械臂的轨迹重复精度。非接触式的重复定位精度测试方法有激光跟踪仪测试法,该方法价格贵、测试易受环境影响,设备难维护,测试精度不高。
技术实现要素:
3.本发明要解决的技术问题是,针对现有技术存在的上述缺陷,提供了一种用于机械臂产品的重复定位精度测试台,能够测量机械臂基于空间某点的重复定位精度,并且测量基于空间某个路径的重复精度;本法明提出的测试方式是非接触式的;加工成本低,拆装便利,更换机械臂时只需要将距离测试工装拆下再安装到新机械臂上即可,测量速度快。
4.本发明为解决上述技术问题所采用的技术方案是:
5.一种用于机械臂产品的重复定位精度测试台,包括第一支撑台、测试点位台架、距离测量工装、机械臂、第二支撑台,第二支撑台设置于第一支撑台一侧,测试点位台架设置于第一支撑台,机械臂设置于第二支撑台上,距离测量工装设置于机械臂的活动端上;测试点位台架用于提供固定的点位和测试路径,距离测量工装上设有多个激光位移传感器。
6.按照上述技术方案,测试点位台架包括底板和多个支柱,底板设置于第一支撑台上,多个支柱布置于底板上,每个支柱的顶端设有定位块。
7.按照上述技术方案,多个支柱分为3种,分别为第一支柱、第二支柱和第三支柱,第一支柱的个数为2个,第二支柱的个数为1个,第三支柱的个数为2个,第三支柱、第二支柱和第一支柱的高度依次增加,第二支柱设置于底板的中央,2个第一支柱和2个第三支柱布置于第二支柱四周。
8.按照上述技术方案,支柱通过螺钉固设于底板上,支柱顶部设有凹槽,凹槽内设有磁铁,定位块通过磁铁设置于支柱顶部。
9.按照上述技术方案,距离测量工装包括连接板和安装法兰,安装法兰设置于机械臂的活动端,多个激光位移传感器沿安装法兰周向布置,激光位移传感器通过连接板与安装法兰连接;各激光位移传感器发出的激光两两相互垂直。
10.按照上述技术方案,安装法兰上沿周向均匀分布有多个斜切平面,连接板设置于斜切平面上;通过斜切平面使各激光位移传感器发出的激光两两相互垂直。
11.按照上述技术方案,激光位移传感器的个数为3个;斜切平面的个数也为3个,每两个平面之间的夹角均为120
°
。
12.按照上述技术方案,测试点位台架通过螺钉固定在第一支撑台上,距离测试工装通过螺钉固定在机械臂的活动末端,机械臂通过螺钉固定在第二支撑台上;
13.激光位移传感器通过三颗螺钉安装在连接板上,所述连接板通过螺钉与安装法兰连接。
14.一种采用以上所述的用于机械臂产品的重复定位精度测试台的测试方法,测试点位台架包括底板和多个支柱,底板设置于第一支撑台上,n个支柱布置于底板上,每个支柱的顶端设有定位块,支柱顶部的定位块作为相应的路径点pointn(n=1,2,。。。。。。,n),n为支柱的个数;
15.所述的测试方法,包括以下步骤:
16.s1、机械臂在自身额定速度下带动距离测试工装沿着各支柱顶部的定位块作为路径点进行直线运动,每通过一个路径点机械臂会停下来,停顿时间t,在运动和停顿的过程中,m个激光位移传感器均会以一定的采样频率进行读数,并将读取的数据作为一个路径点的空间坐标点;
17.s2、沿着各路径点之间形成的路径进行重复移动,重复次数为n次;
18.s3、每个路径点均获得n组采样数据,取n组数据的算数平均值得到(x,y,z),并取这n组数据相对平均值的标准差得到(dx,dy,dz),从而得到空间某一点的重复定位精度m=sqrt(dx^2 dy^2 dz^2);
19.s4、根据s3步骤可以得到n个空间点的测量平均值,相当于得到了空间中n个点的坐标,从而可以拟合出n条空间直线l1,l2,
……
,ln,由于台架是固定的,每两个点在空间中的相对位置是固定的,因此对应的空间直线也是固定的l1,l2,
……
,ln,通过对比两条直线的逼近程度,可以计算出机械臂沿着空间某条直线行走时的轨迹重复性。
20.按照上述技术方案,激光位移传感器的个数m为3个,三个激光位移传感器发出的激光相互垂直;时间t=5s,n为5个,n为30。
21.本发明具有以下有益效果:
22.1、本发明能够测量机械臂基于空间某点的重复定位精度,并且测量基于空间某个路径的重复精度;本法明提出的测试方式是非接触式的;加工成本低,拆装便利,更换机械臂时只需要将距离测试工装拆下再安装到新机械臂上即可,测量速度快。
23.2、三个激光位移传感器集成在一个安装法兰上,彼此之间两两相互垂直,测试点位可以根据实际情况进行微调,磁吸的方案方便调节和拆装,可以提升测试效率。
附图说明
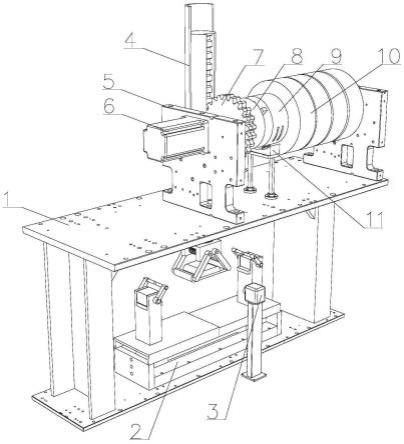
24.图1是本发明实施例中用于机械臂产品的重复定位精度测试台的结构示意图;
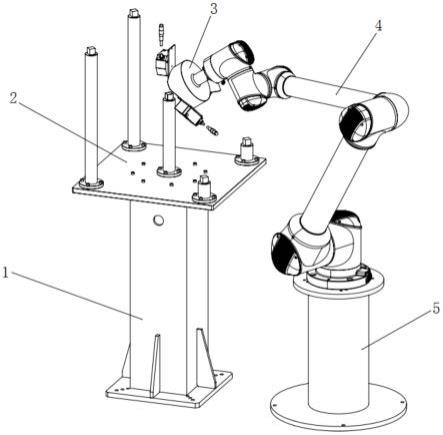
25.图2是本发明实施例中测试点位台架的结构示意图;
26.图3是本发明实施例中距离测试工装的结构示意图;
27.图4是本发明实施例中激光位移传感器光路示意图;
28.图5是本发明实施例中测试路径示意图;
29.图中,1-方形支撑台、2-测试点位台架、3-距离测量工装、4-机械臂、5-圆形支撑
台、6-底板、7-第一支柱、8-第二支柱、9-第三支柱、10-定位块、11-磁铁、12-螺钉、13-激光位移传感器、14-连接板、15-螺钉、16-安装法兰。
具体实施方式
30.下面结合附图和实施例对本发明进行详细说明。
31.参照图1~图5所示,本发明提供的一个实施例中的用于机械臂产品的重复定位精度测试台,包括第一支撑台、测试点位台架2、距离测量工装3、机械臂4、第二支撑台,第二支撑台设置于第一支撑台一侧,测试点位台架2设置于第一支撑台,机械臂4设置于第二支撑台上,距离测量工装3设置于机械臂4的活动端上;测试点位台架2用于提供固定的点位和测试路径,距离测量工装3上设有多个激光位移传感器13。
32.进一步地,第一支撑台为方形支撑台1,第二支撑台为圆形支撑台5。
33.进一步地,测试点位台架2包括底板6和多个支柱,底板6设置于第一支撑台上,多个支柱布置于底板6上,每个支柱的顶端设有定位块10。
34.定位块为小立方块。
35.进一步地,多个支柱分为3种,分别为第一支柱7、第二支柱8和第三支柱9,第一支柱7的个数为2个,第二支柱8的个数为1个,第三支柱9的个数为2个,第三支柱9、第二支柱8和第一支柱7的高度依次增加,第二支柱8设置于底板6的中央,2个第一支柱7和2个第三支柱9布置于第二支柱8四周。
36.进一步地,2个第三支柱9布置于第二支柱8的前方两侧,2个第一支柱7布置于第二支柱8的后方两侧。
37.进一步地,支柱通过螺钉12固设于底板6上,支柱顶部设有凹槽,凹槽内设有磁铁11,定位块10通过磁铁11设置于支柱顶部;加工成本低、装拆方便、调整灵活。
38.进一步地,距离测量工装3包括连接板14和安装法兰16,安装法兰16设置于机械臂4的活动端,多个激光位移传感器13沿安装法兰16周向均匀布置,激光位移传感器13通过连接板14与安装法兰16连接;各激光位移传感器13发出的激光两两相互垂直。
39.进一步地,安装法兰16上沿周向均匀分布有多个斜切平面,连接板14设置于斜切平面上;通过斜切平面使各激光位移传感器13发出的激光两两相互垂直。
40.进一步地,激光位移传感器13的个数为3个;斜切平面的个数也为3个,每两个平面之间的夹角均为120
°
。
41.进一步地,所述三个激光位移传感器13安装到法兰对应位置后,发出的激光线束两两相互垂直;该距离测量工装3提供了两两相互垂直的三方向测距方案,集成度高、加工成本低、安装方便、体积占比小。
42.进一步地,该重复定位精度测试台不仅可以测量机械臂4对于空间中某一点的重复定位精度,也可以测量机械臂4针对空间中某一条路径的重复定位精度,具有测量精度高、测量范围大、可测种类丰富、操作简单、总体成本低等优点。
43.进一步地,测试点位台架2通过8颗螺钉固定在第一支撑台上,距离测试工装通过4颗螺钉固定在机械臂4的活动末端,机械臂4通过螺钉固定在第二支撑台上;
44.激光位移传感器13通过3颗螺钉15安装在连接板14上,所述连接板14通过螺钉15与安装法兰16连接。
45.一种采用以上所述的用于机械臂产品的重复定位精度测试台的测试方法,测试点位台架2包括底板6和多个支柱,底板6设置于第一支撑台上,多个支柱布置于底板6上,每个支柱的顶端设有定位块10,支柱顶部的定位块10作为相应的路径点pointn(n=1,2,
……
,n),n为支柱的个数;
46.所述的测试方法,包括以下步骤:
47.s1、机械臂4在自身额定速度下带动距离测试工装沿着各支柱顶部的定位块10作为路径点进行直线运动,每通过一个路径点point机械臂4会停下来,停顿时间t,在运动和停顿的过程中,3个激光位移传感器13均会以一定的采样频率进行读数,并将读取的数据作为一个路径点的空间坐标点;
48.由于三个激光位移传感器13相互垂直,通过三个激光位移传感器定位定位块的位置,并将读取的数据转为一个空间坐标点(xi,yi,zi),其中i=0,1,2,
……
;
49.s2、沿着图5中所示的各路径点之间形成的路径进行重复移动,重复次数为n次;
50.s3、每个路径点均获得n组采样数据,取n组数据的算数平均值得到(x,y,z),并取这n组数据相对平均值的标准差得到(dx,dy,dz),从而得到空间某一点的重复定位精度m=sqrt(dx^2 dy^2 dz^2);
51.最终每个point均可以获得30组采样数据,取这30组数据的算数平均可以得到(x,y,z),取这30组数据的相对于平均值的标准差可以得到(dx,dy,dz),从而可以得到空间某一点的重复定位精度m=sqrt(dx^2 dy^2 dz^2)。
52.s4、根据s3步骤可以得到n个空间点的测量平均值,相当于得到了空间中n个点的坐标,从而可以拟合出n条空间直线l1,l2,
……
,ln,由于台架是固定的,每两个点在空间中的相对位置是固定的,因此对应的空间直线也是固定的l1,l2,
……
,ln,通过对比两条直线的逼近程度,可以计算出机械臂4沿着空间某条直线行走时的轨迹重复性。
53.进一步地,激光位移传感器13的个数为3个,三个激光位移传感器13发出的激光相互垂直;
54.时间t=5s,n为5个,n为30。
55.以上的仅为本发明的较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明申请专利范围所作的等效变化,仍属本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。