技术特征:
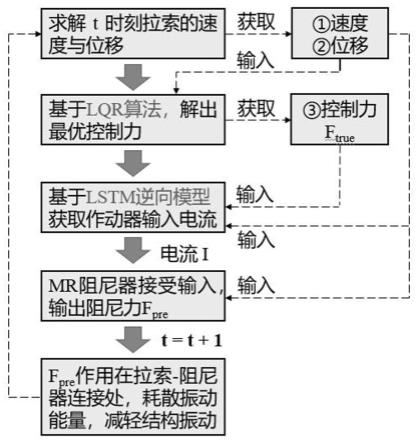
1.一种基于lstm逆向模型的半主动控制方法,其特征在于,包括:获取t时刻斜拉桥拉索的响应;其中,所述响应为活塞杆的速度和位移;将所述活塞杆的速度和位移输入预设的算法进行计算,得到最优控制力f
ture
;将所述最优控制力f
ture
输入预设的基于lstm的mr阻尼器的逆向映射模型,得到mr阻尼器的输入电流;将所述输入电流和t时刻活塞杆的速度、位移发送至mr阻尼器,以输出阻尼力f
pre
;将所述阻尼力f
pre
作用在拉索-阻尼器连接处,并使t=t 1,返回所述获取t时刻斜拉桥拉索的响应的步骤。2.根据权利要求1所述的基于lstm逆向模型的半主动控制方法,其特征在于,所述mr阻尼器产生与活塞杆运动方向相反的阻抗力,所述mr阻尼器在xoy平面内产生阻尼力的方向不变,为:,其中,为所述mr阻尼器在y方向产生的阻尼力,为所述mr阻尼器在x方向产生的阻尼力,为不考虑垂度时拉索与水平面的夹角。3.根据权利要求1所述的基于lstm逆向模型的半主动控制方法,其特征在于,所述预设的算法,包括:确定结构系统在外部环境干扰以及主动控制力作用下的运动方程为:,且,,其中,m、c、k分别为拉索的n维质量矩阵、阻尼矩阵、刚度矩阵,为阻尼器的位置列阵,e为外加荷载的位置矩阵,、分别为阻尼器控制力向量和外部荷载向量;将所述运动方程转换为空间方程,得到:,;确定结构系统的二次性能泛函为:,其中,为半正定矩阵,为正定矩阵;在无限的时间区间内得到最优控制量,即求解满足约束条件的值,使得系统性能泛函j取到极小值;其中,所述为最优控制力f
ture
。4.根据权利要求1所述的基于lstm逆向模型的半主动控制方法,其特征在于,所述预设的基于lstm的mr阻尼器的逆向映射模型包括:输入层、输出层和多个隐藏层,每个隐藏层包括多个网络单元,每个网络单元包括输入门、遗忘门、输出门和单元状态,在单元状态更新过程中,所述输出层还连接一个单层全连接神经网络用于输出特征;所述全连接神经网络以relu函数作为激活函数,隐藏层的激活函数为tanh函数,所述逆向映射模型反向传播优化算法采用adam算法,所述逆向映射模型超参数采用pso算法进行优化;mr阻尼器正常工作情况下,所述输入层用于输入活塞的位移、速度和控制力,输出层用于输出控制电流值,并采用均方根误差函数作为网络训练的损失函数。5.一种基于lstm逆向模型的半主动控制装置,其特征在于,包括:获取模块,用于获取t时刻斜拉桥拉索的响应;其中,所述响应为活塞杆的速度和位移;计算模块,用于将所述活塞杆的速度和位移输入预设的算法进行计算,得到最优控制
力f
ture
;输入模块,用于将所述最优控制力f
ture
输入预设的基于lstm的mr阻尼器的逆向映射模型,得到mr阻尼器的输入电流;发送模块,用于将所述输入电流和t时刻活塞杆的速度、位移发送至mr阻尼器,以输出阻尼力f
pre
;返回模块,用于将所述阻尼力f
pre
作用在拉索-阻尼器连接处,并使t=t 1,返回所述获取t时刻斜拉桥拉索的响应的步骤。6.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至4中任一项所述方法的步骤。7.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至4中任一项所述的方法的步骤。
技术总结
本发明涉及斜拉桥的拉索振动控制技术领域,公开了一种基于LSTM逆向模型的半主动控制方法、装置、设备和存储介质,其中,方法包括:获取t时刻斜拉桥拉索的响应;将活塞杆的速度和位移输入预设的算法进行计算,得到最优控制力F
技术研发人员:吴腾 李志鹏 向星宇 贺耀北 白洁
受保护的技术使用者:中南大学
技术研发日:2022.11.02
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。