1.本实用新型涉及电机调速及伺服控制技术领域,具体涉及一种高功率密度伺服驱动器,从而满足对伺服电机的闭环控制。
背景技术:
2.随着计算机技术、电力电子技术、微电子技术和电机制造技术的发展,使得伺服控制技术在许多高科技领域得到了广泛的应用,如激光加工、机器人、数控机床、办公自动化设备、柔性制造系统以及雷达和各种军事武器的随波系统等。
3.在驱动器应用中,大功率和高集成度始终是两个相对立的因素,如果满足大功率的要求,那么系统的热耗就会增加,集成度就会有所下降;反之如果布局紧凑,则会无法承受更大的功率。因此,为实现高功率密度伺服驱动器,解决模块化大功率驱动器散热难题,满足仿生机器人针对伺服驱动器模块化、轻质化、小型化的应用需求,使得模块化高功率密度伺服驱动硬件设计技术的实现成为可能。并且与此同时减小发热以提高效率,减小电磁干扰,解决串扰和节点振铃难题,急需一种既能满足布局紧凑体积小、又能解决散热问题的伺服驱动器。
技术实现要素:
4.本实用新型目的在于设计一种高功率密度的伺服驱动器,该驱动器可实现270v的电源电压输入,50a的额定电流输出。外形设计采用紧凑型设计,满足当前工业控制器的高度整合化、小型化、无风扇需求。驱动器外部端口可接ethercat,rs485及多路数字/模拟接口,通过pwm方式正弦波控制驱动,控制输出的pwm信号经过预驱动电路控制功率层的三相桥,实现对伺服电机的位置、速度或力矩的闭环控制。满足针对伺服驱动器高稳定性、模块化、轻质化、小型化的应用需求。
5.本实用新型为实现上述目的所采用的技术方案是:一种高功率密度伺服驱动器,包括自上而下依次设置的控制板、预驱动板和功率板;
6.所述控制板设有中央处理器,所述中央处理器与预驱动板连接;
7.所述预驱动板设有预驱动电路,所述预驱动电路与控制板上的中央处理器、功率板上的三相桥功率驱动电路连接;
8.所述功率板设有三相桥功率驱动电路和地网络散热铜排,所述地网络散热铜排设于三相桥功率驱动电路上方且位于预驱动板与功率板之间,所述地网络散热铜排与三相桥功率驱动电路共地,且与外部电源地线连接。
9.所述预驱动板设有预驱动电路,所述预驱动芯片电路采用预驱动芯片;
10.所述预驱动芯片的正输入端in 、负输入端in-分别与中央处理器的两个pwm输出端连接,所述预驱动芯片的关输出端goff、开输出端gon分别经电阻后连接、并作为预驱动电路的输出端,与功率板上三相桥功率驱动电路的某相单桥的某个mos管连接。
11.所述预驱动芯片的正输入端in 与中央处理器的一个pwm输出端之间、预驱动芯片
的负输入端in-与中央处理器的另一个pwm输出端之间分别连有电阻;所述正输入端in 、负输入端in-分别通过电容接地。
12.所述预驱动电路的输出端与三相桥功率驱动电路的某相上桥臂的mos管连接时,预驱动芯片的门驱动正电压电源端vh与二极管阴极连接、还通过电容c13与预驱动芯片的接地端gndiso引脚连接,所述二极管阳极与15v电源连接,所述接地端gndiso引脚与电机的某相连接。
13.所述预驱动电路的输出端与三相桥功率驱动电路的某相下桥臂的mos管连接时,预驱动芯片的门驱动正电压电源端vh与二极管阴极连接,所述二极管阳极与15v电源连接,所述预驱动芯片的接地端gndiso接地。
14.所述三相桥功率驱动电路中的每相上桥臂与下桥臂间的结点与电机的某相连接。
15.所述三相桥功率驱动电路中的mos管芯片在功率板上均匀分布,上桥臂的mos管与下桥臂的mos管分行排列。
16.所述地网络散热铜排和预驱动板之间的距离、与地网络散热铜排和功率板之间的距离相等。
17.所述地网络散热铜排设于三相桥功率驱动电路下桥臂的mos管芯片上方。
18.所述功率板顶层采用铝基板,且三相桥功率驱动电路的所有mos管芯片表面与铝基板接触。
19.本实用新型具有以下有益效果及优点:
20.1.为了增强散热效果,除了在最底层功率板设计中采用了铝基板材质外,还对功率板的gnd网络在制板过程中通过铜排进行连接,这样既增加了电流的通流能力又加强了散热效果。
21.2.采用sic(碳化硅)工艺的mosfet和预驱动芯片,使得器件的耐压更高,mosfet的尺寸更小,大大降低了mos管的导通电阻和传热热阻,使得热耗及器件功率更低。
22.3.采用三层叠放的结构,将功率部分与控制部分分隔开来,能够提高效率,减小电磁干扰,解决串扰和节点振铃难题。
附图说明
23.图1高功率密度的伺服驱动器整体外观图;
24.图2高功率密度的伺服功率板俯视图;
25.图3高功率密度伺服预驱动板主视图;
26.图4a高功率密度伺服驱动器预驱动电路图一;
27.图4b高功率密度伺服驱动器预驱动电路图二;
28.图5高功率密度伺服驱动器三相桥功率驱动电路图;
29.图6为伺服驱动器工作原理示意图;
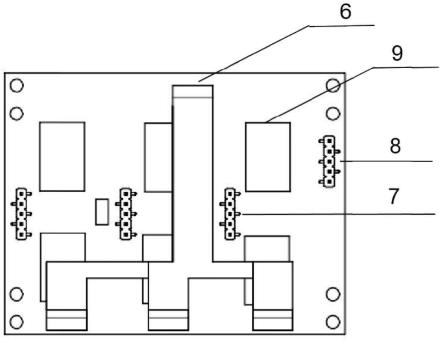
30.其中,1控制板、2预驱动板、3功率板、4机械安装孔、5固定孔、6gnd网络连接铜条、7同预驱动板连接的连接器、8同预驱动板270v dc电源连接的连接器、9mosfet。
具体实施方式
31.下面结合附图及实施例对本实用新型做进一步的详细说明。
32.本实用新型提供了一种自主设计的高功率密度伺服电机驱动器。高功率密度伺服电机驱动器采用三层叠放结构,满足整体尺寸85mm*65mm*35mm,整体由三块电路板组成,相邻电路板间采用板对板连接器连接,并通过板间的安装孔通过螺柱和螺丝固定。本实施例中的高功率密度是指额定功率可达到10kw以上,即额定电流可达到50a以上,通过预驱动芯片和mosfet实现。
33.其中最顶层为控制板,控制板包括mcu微处理器、外部存储器、通信接口以及板对板连接器接口。需要说明的是,中央处理器为瑞萨的rz/t1系列微控制器,支持ethercat工业以太网总线,微控制器提供驱动电机所用的pwm信号,存储器控制信号,以及外部通信接口的控制信号。板对板连接器主要用于同预驱动板的信号连接和传递。
34.中间层为预驱动板,预驱动板包括pwm预驱动电路,母线电压检测电路,电流采样电路,控制电压输入接口及板对板连接器接口等。
35.预驱动电路用于实现三相无刷电机的驱动功能,驱动电机的信号由微控制器提供,预驱动电路通过预驱动芯片对微控制器提供的信号与电机驱动信号进行有效的隔离,通过隔离实现对微控制器的保护,同时提高驱动能力。母线电压检测用于电源输入电压的检测,电流采样电路实现对电机电流环的闭环控制。
36.母线电压检测电路为现有技术,输入端经过母线电压和电阻分压输入至差分隔离运放芯片中,输出端输出差分(单端)信号至mcu微处理器中进行电压检测的数据读取。电流采样电路包括信号调理电路,为现有技术,功率板上三相桥功率驱动电路上桥臂和下桥臂之间结点通过采样电阻连接至电机的某相,该采样电阻连接至预驱动板上的信号调理电路,信号调理电路通过σ-δ采样输出时钟和数据信号至mcu微处理器。板对板连接器用于同控制板及功率板间的信号及电源传递。预驱动电路主要有驱动作用,将输入的弱电信号放大成足够强,用于外部设备的强电信号,对于本专利中,其某相电机控制原理是由控制层的mcu内部产生差分的pwm信号,信号经过rc滤波进入两个预驱动芯片,预驱动芯片分别输出控制mos管上下桥臂栅极的通断信号从而控制电机的转动。
37.最下层为功率板,功率板由六片mosfet组成,主要功能是负责伺服驱动器的逆变功能。mos管采用先进的碳化硅工艺,使得尺寸和导通电阻更小,并且耐压更高,适用于高压的伺服驱动器中。
38.三相桥臂的输入信号由mcu给出,经过隔离后通过连接器给到mosfet。且符合对电机耐压和额定电流的要求,在空间布局上也满足要求。在pcb的设计上,采用单面贴片,而另一面铝基板工艺并且与底部外壳直接连接的方式散热,使mosfet器件与铝板良好接触,增大其散热面积,便于积累热量的快速释放,并且单板上的gnd网络经过外部铜排连接,在增强散热的同时也加大了过流能力。
39.功率板上的三相电机输出接口提供电机u、v、w三相的驱动输出接口。
40.如图1,高功率密度伺服驱动器板卡采用三层叠放设计,标号1为驱动器的控制板,2为预驱动板,3为功率板,4为机械安装孔,用于板卡与外部安装机构的固定,5为板卡固定孔,用于驱动器三层板卡之间的固定。
41.如图2为功率板板卡的电路俯视结构图,其中6为gnd网络的连接铜条,铜条形状通过模具定制而成,在制版贴片时与器件一同焊至板上,7为同预驱动板连接的连接器,8为同预驱动板270v dc电源连接的连接器,9是6个sic工艺的mosfet,型号为scth90n65g2v-7。功
率板采用单面布局,另一面通过铝基板进行导热,并且焊接的铜条也有导热的作用。如图3的伺服驱动器的左视图,也可以看出铜排是焊在功率板上,且铜排具有gnd网络。在装配过程中,铜排的高度在功率板和预驱动板的中间位置。
42.如图4a、图4b、图5,电机驱动电路图如下。其中u8和u9为预驱动芯片,预驱动芯片采用sic工艺,两个输入端分别接pwm信号的差分电平实现对电机的上下桥臂的控制,mos管同样采用sic工艺,其耐压为650v,承受的最大持续电流为116a。可以满足所需要的指标及有一定的裕量。
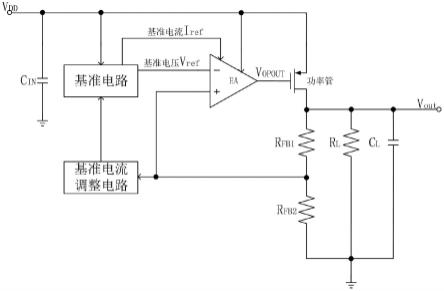
43.如图6为伺服驱动器的系统结构框图,可以看出,主控层主要提供驱动器的控制电路以及与外部信号通信的接口。控制芯片采用瑞萨rz/t1系列的微控制器,外围包括ethercat通迅接口,与编码器及外部io连接的接口电路;中间层为预驱动层,包含电源转换电路,电流采样、母线电压检测电路,电机预驱动电路。驱动器的控制电和功率电采用分开供电方式,其中控制电采用24v dc电源电压通过预驱动板输入。预驱动电路模块的主要作用是对电机控制的上下桥臂控制信号进行放大,使之可以控制大功率的mos管,由于本设计中mos管采用sic材质,所以与之匹配的预驱动芯片也采用sic材质的stgap2sics。电流与电压采样电路与以往的方案相同,这里不加赘述。功率板主要包含由六个mosfet及采样电阻构成的三相桥功率驱动电路,其动力电的供给及整流均由外部的电源滤波板提供。
44.在本技术所提供的实施例中,应理解到,所描述的板卡层次结构,三层板卡的尺寸,外部连接器的摆放位置,可以根据外部环境的变化和约束而调整。例如,以上所描述的驱动器实施例仅针对某仿生机器人伺服驱动器的其中一种实施例,将电源的输入滤波、编码器等电路单独做到另外的单板上以减小尺寸。随着额定电流、电压的变化,以及空间尺寸要求的调节等,所述驱动器会在板卡尺寸、功率器件选型、连接器摆放位置、散热铝基板的面积及铜条的布局方面等进行调整。
45.以上对本实用新型所提供的一种紧凑型伺服驱动器进行了详细介绍,对于本领域的一般技术人员,依据本实用新型实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。