1.本发明属于自动化技术与现代控制领域,尤其涉及及一种基于扰动观测器的污水处理系统的自适应事件触发估计方法。
背景技术:
2.目前城市污水的处理方式多以集中处理为主,图1是污水处理系统工艺流程示意图,庞大的污水收集系统的投资往往远超污水处理厂本身的投资,因此建设大型的污水处理厂,集中处理污水,从污水再生回用的角度来说不一定是唯一可取的方案。由于各污水处理厂不同时段的污水收集量具有随机性,且依据水量始终为非负值的特性。针对实际系统中由于外部因素干扰,导致系统的外部扰动不可测量,进而导致数据信息存在误差。事件触发机制是一种基于设置事件触发阈值的信号传输策略,但目前常用的静态事件触发策略由于预先设定了触发阈值,无法自适应调整系统资源分配。
技术实现要素:
3.本发明目的在于提供一种基于扰动观测器的污水处理系统的自适应事件触发估计方法,以解决上述的技术问题。
4.为解决上述技术问题,本发明的一种基于扰动观测器的污水处理系统的自适应事件触发估计方法的具体技术方案如下:
5.一种基于扰动观测器的污水处理系统的自适应事件触发估计方法,包括如下步骤:
6.步骤1、建立污水处理系统的正马尔科夫跳变系统状态空间模型;
7.步骤1.1、建立污水处理系统的状态空间模型;
8.步骤1.2、转化为正马尔可夫跳变系统状态空间模型;
9.步骤2、建立污水处理系统的分布式自适应事件触发机制;
10.步骤3、建立污水处理系统基于自适应事件触发机制的扰动观测器和滤波器;
11.步骤4、设计污水处理系统平稳运行的条件;
12.步骤5、验证污水处理系统的正性;
13.步骤6、验证污水处理系统的稳定性。
14.进一步的,所述步骤1.1的污水处理系统的状态空间模型为:
15.x(k 1)=a
r(k)
x(k) b
r(k)
ω(k),
[0016][0017]
z(k)=e
r(k)
x(k) f
r(k)
ω(k),
[0018]
其中,分别为污水处理系统的系统状态,外部扰动输入,待估计的输出和分布式传感器中第g个传感器节点的可测量输出,r(k)为马尔科夫跳变过程,其取值在集合s={1,2,...,n},
当r(k)=i∈s时,系统矩阵ai≥0,bi≥0,ei≥0,fi≥0。
[0019]
进一步的,所述步骤1.2正马尔可夫跳变系统状态空间模型为:
[0020][0021]
其中,δ>0,λ
ij
≥0,r(k)的转移概率满足:pr{r(k 1)=j|r(k)=i}=π
ij
,对任意的i,j∈s,π
ij
≥0,并且进一步的,所述步骤2的污水处理系统的分布式自适应事件触发机制的构建形式如下:
[0022][0023]
其中,是第g个事件发生器在采样时刻的输出,k∈[k
l
,k
l 1
],自适应事件触发阈值β(k)是自适应更新律,并且满足:
[0024][0025]
其中,给定初始值β(0)且对于成立。
[0026]
进一步的,所述步骤3的扰动观测器构建形式如下:
[0027]
给定一个线性外生系统ω(k)=w
r(k)
ξ(k),是此扰动系统的状态:
[0028]
ξ(k 1)=u
r(k)
ξ(k),
[0029]
其中,w
r(k)
≥0,u
r(k)
≥0,w
r(k)
和u
r(k)
均为实对称矩阵,因此,对应的扰动观测器的构建形式如下:
[0030][0031][0032]
基于扰动观测器的滤波器的具体形式如下:
[0033][0034][0035]
其中,是扰动观测器的状态,是扰动信号的估计,xf(k)是滤波器的状态,zf(k)是z(k)的估计,均是待设计的增益矩阵,定义e
x
(k)=xf(k)-x(k),ez(k)=zf(k)-z(k),得到一个扩展的误差系统:
[0036][0037]
[0038][0039]
进一步的,所述步骤4的污水处理系统平稳运行的条件如下:
[0040]
设计向量pi>0,向量θil<0,θi<0,η
ij
,ηi,以及向量qi>0,使得
[0041][0042][0043][0044][0045][0046][0047][0048][0049][0050]
θ
i1
≥θi,η
i1
≥ηi,
[0051][0052][0053]
对任意的i∈s和ι=1,2,...,n成立,其中,ψ=i-υ,φ=i υ,矩阵i是单位矩阵,1q×q是属于元素全为1的矩阵,那么,污水处理系统在步骤3中的扰动观测器与自适应事件触发滤波器下是正的、随机稳定的,其中增益矩阵的具体设计形式为
[0054][0055]
[0056][0057]
进一步的,所述步骤5的具体步骤如下:
[0058]
步骤5.1、结合步骤4中第一个约束条件和增益矩阵的具体形式,有
[0059][0060][0061][0062][0063]
步骤3中的误差系统可以写为:
[0064][0065][0066]
步骤5.2、结合步骤2中的自适应事件触发条件,有
[0067][0068]
步骤5.3、定义那么,可以推出
[0069][0070][0071]
其中,
[0072][0073]
步骤5.4、利用步骤4中第三和第四个约束条件可以得到:和利用步骤4中第六和第七个约束条件有:
[0074]
和因此,利用步骤4中第八和第九个约束条件得出,ez(k)≥0,由于给定初始条件e
x
(0)≥0和e
ω
(0)≥0,因此,根据递推法可以得到e
x
(k)≥0和e
ω
(k)≥0。
[0075]
进一步的,所述步骤6包括如下具体步骤:
[0076]
步骤6.1、构建随机余正李雅普诺夫函数为:
[0077][0078]
其中,其中,
[0079]
步骤6.2、基于步骤5.2可以得到误差系统满足:
[0080][0081]
其中,
[0082]
步骤6.3、计算李雅普诺夫函数前项差的数学期望为:
[0083][0084]
步骤6.4、结合步骤4中的条件,推导出以及
[0085]
将其应用于步骤4中的最后两个条件中,可以得出
[0086][0087][0088]
将上述不等式应用于步骤6.3中,可以得到由于因此,因此,成立,得到:
[0089][0090]
对于
[0091][0092]
得出
[0093]
本发明的一种基于扰动观测器的污水处理系统的自适应事件触发估计方法具有以下优点:本发明方法基于正马尔科夫跳变系统建立污水处理系统的状态空间模型,并设计了一种扰动观测器处理外部扰动,因此基于扰动观测器的自适应事件触发分布式滤波器能够对测量值做出更加精确的估计,提高了污水处理系统的准确性与安全性。自适应事件触发策略能自适应系统性能的改变,保证了系统资源的利用效益。
附图说明
[0094]
图1是污水处理系统工艺流程示意图;
[0095]
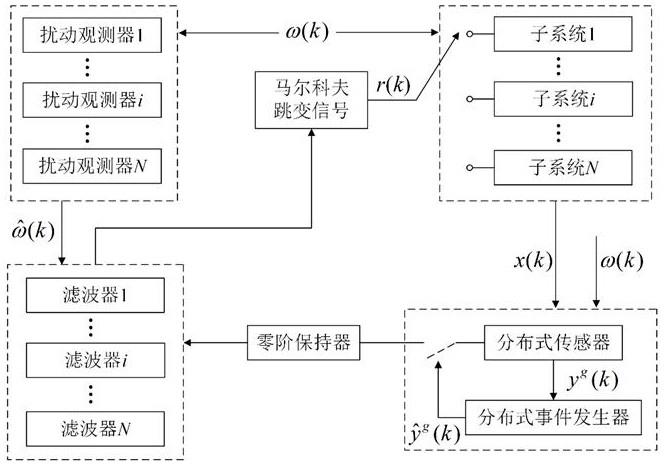
图2是基于扰动观测的自适应事件触发滤波框架示意图。
具体实施方式
[0096]
为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种基于扰动观测器的污水处理系统的自适应事件触发估计方法做进一步详细的描述。
[0097]
如图2所示,本发明的一种基于扰动观测器的污水处理系统的自适应事件触发估计方法,包括如下步骤:
[0098]
步骤1、建立污水处理系统的正马尔科夫跳变系统状态空间模型,具体方法是:
[0099]
1.1建立污水处理系统的状态空间模型
[0100]
x(k 1)=a
r(k)
x(k) b
r(k)
ω(k),
[0101][0102]
z(k)=e
r(k)
x(k) f
r(k)
ω(k),
[0103]
其中,分别为污水处理系统的系统状态,外部扰动输入,待估计的输出和分布式传感器中第g个传感器节点的可测量输出。r(k)为马尔科夫跳变过程,其取值在集合s={1,2,...,n},当r(k)=i∈s时,系统矩阵
[0104]
1.2转化为正马尔可夫跳变系统状态空间模型
[0105][0106]
其中,δ>0,λ
ij
≥0,r(k)的转移概率满足:pr{r(k 1)=j|r(k)=i}=π
ij
,对任意的i,j∈s,π
ij
≥0,并且
[0107]
步骤2、建立污水处理系统的分布式自适应事件触发机制,其构建形式如下:
[0108][0109]
其中,是第g个事件发生器在采样时刻的输出,k∈[k
l
,k
l 1
]。自适应事件触发阈值β(k)是自适应更新律,并且满足:
[0110]
[0111]
其中,给定初始值β(0)且对于成立。
[0112]
步骤3、建立污水处理系统基于自适应事件触发机制的扰动观测器和滤波器,其构建形式如下:
[0113]
给定一个线性外生系统ω(k)=w
r(k)
ξ(k),是此扰动系统的状态:
[0114]
ξ(k 1)=u
r(k)
ξ(k),
[0115]
其中,w
r(k)
≥0,u
r(k)
≥0,w
r(k)
和u
r(k)
均为实对称矩阵。因此,对应的扰动观测器的构建形式如下:
[0116][0117][0118]
构建污水处理系统基于扰动观测器的滤波器,具体形式如下:
[0119][0120][0121]
其中,是扰动观测器的状态,是扰动信号的估计,xf(k)是滤波器的状态,zf(k)是z(k)的估计。均是待设计的增益矩阵。
[0122]
定义e
x
(k)=xf(k)-x(k),ez(k)=zf(k)-z(k)。可以得到一个扩展的误差系统:
[0123][0124][0125][0126]
步骤4、设计污水处理系统平稳运行的条件如下:
[0127]
设计向量pi>0,向量θiι<0,θi<0,ηi,ηi,以及向量qi>0,使得
[0128][0129][0130][0131]
[0132][0133][0134][0135][0136][0137]
θ
iι
≥θi,ηi≥ηi,
[0138][0139][0140]
对任意的i∈s和ι=1,2,...,n成立,其中,ψ=i-υ,φ=i υ,矩阵i是单位矩阵,1q×q是属于元素全为1的矩阵,那么,污水处理系统在步骤3中的扰动观测器与自适应事件触发滤波器下是正的、随机稳定的,其中增益矩阵的具体设计形式为
[0141][0142][0143][0144]
步骤5、污水处理系统的正性验证过程如下:
[0145]
5.1结合步骤4中第一个约束条件和增益矩阵的具体形式,有
[0146][0147][0148][0149][0150]
步骤3中的误差系统可以写为:
[0151][0152][0153]
5.2结合步骤2中的自适应事件触发条件,有
[0154][0155]
5.3定义那么,可以推出
[0156][0157][0158]
其中,
[0159][0160]
5.4利用步骤4中第三和第四个约束条件可以得到:和利用步骤4中第六和第七个约束条件有:和因此,利用步骤4中第八和第九个约束条件不难得出,ez(k)≥0,由于给定初始条件e
x
(0)≥0和e
ω
(0)≥0,因此,根据递推法可以得到e
x
(k)≥0和e
ω
(k)≥0。也就是说,基于步骤4中所设计的条件,污水处理系统以及扰动观测器和自适应事件触发滤波器的正性均得以保证。
[0161]
步骤6、污水处理系统的稳定性的验证过程如下:
[0162]
6.1构建随机余正李雅普诺夫函数为
[0163][0164]
其中,其中,
[0165]
6.2基于步骤5.2可以得到误差系统满足:
[0166][0167]
其中,
[0168]
6.3计算李雅普诺夫函数前项差的数学期望为:
[0169][0170]
6.4结合步骤4中的条件,推导出以及将其应用于步骤4中的最后两个条件中,可以得出
[0171][0172][0173]
从而,将上述不等式应用于步骤6.3中,可以得到由于因此,进一步地,成立。这意味着
[0174][0175]
对于
[0176][0177]
于是,就不难得出因此,所设计的污水处理系统是随机稳定的。
[0178]
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本技术的权利要求范围内的实施例都属于本发明所保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。