技术特征:
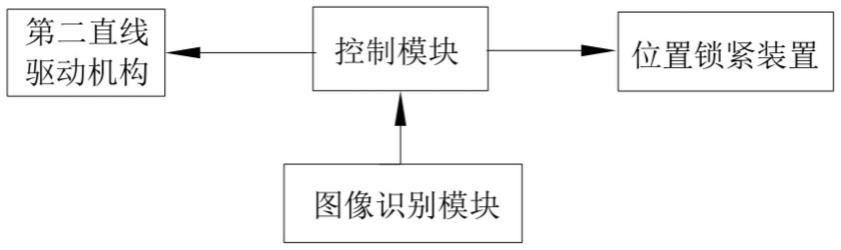
1.一种多轴运动位置同步控制方法,用于实现两个运动体之间的同步运动,其中,第一运动体沿直线运动,第一运动体由第一直线驱动机构驱动作直线运动;第二运动体为多轴作业机构,第二运动体设置于第一运动体运动路线的一侧,该第二运动体包括末端作业模块以及驱动末端作业模块在三维空间内运动的多轴驱动结构,第二运动体连接在第二直线驱动机构上,该第二直线驱动机构驱动第二运动体沿第一运动体的运动方向做直线运动;该方法包括以下步骤:(1)第一直线驱动机构带动第一运动体沿直线匀速运动;(2)第二运动体位于初始位置,当第一运动体即将到达第二运动体处时,第二直线驱动机构带动第二运动体作与第一运动体同方向的直线运动;在第一运动体和第二运动体之间设置同步追随模块使得第一运动体和第二运动体达到同步运动,该同步追随模块包括设置在第一运动体上的光源、设置在第二运动体上的载光板以及设在第二运动体上的视觉识别模块;所述第二运动体在追随第一运动体的过程中,所述光源将光投射到载光板上,所述视觉识别模块对载光板上的光斑进行图像识别,当图像识别模块识别到所述光斑位于载光板的设定位置且保持不变时,第一运动体和第二运动体达到相对位置关系确定且同步运动状态;(3)当第一运动体和第二运动体达到相对位置关系确定且同步运动状态时,利用位置锁定装置将第一运动体和第二运动体锁定在一起,所述位置锁定装置包括设置在第二运动体上的锁紧栓、用于驱动锁紧栓作伸缩运动的锁紧驱动机构以及设置在第一运动体上的锁紧孔,在第一运动体和第二运动体达到相对位置关系确定且同步运动状态时,所述锁紧栓与锁紧孔对准,且锁紧驱动机构将锁紧栓推入到锁紧孔中,使得第一运动体和第二运动体锁紧在一起形成整体向前同步运动。2.根据权利要求1所述的多轴运动位置同步控制方法,其特征在于,所述第二直线驱动机构包括第二驱动电机、丝杠传动机构以及直线移动座,其中,所述第二驱动电机与丝杠传动机构中的丝杠连接,丝杠传动机构中的丝杠螺母设置在直线移动座上,所述直线移动座上设有同步驱动孔;所述位置锁定装置上还设有同步驱动锁紧块,该同步驱动锁紧块由锁紧驱动机构驱动与所述锁紧栓同步运动;在第二直线驱动机构驱动第二运动体作直线运动的过程中,所述同步驱动锁紧块匹配于同步驱动孔中;在步骤(3)中,当锁紧驱动机构将锁紧栓推入到锁紧孔中的同时,带动同步驱动锁紧块离开同步驱动孔,以切断第二直线驱动机构对第二运动体的驱动动力。3.根据权利要求2所述的多轴运动位置同步控制方法,其特征在于,所述锁紧驱动机构采用电磁铁;所述锁紧栓和同步驱动锁紧块连接在一起,并与电磁铁的伸缩端连接;所述锁紧孔的入口处设置成锥形口,所述锁紧栓的末端设置成锥形结构,以便于锁紧栓锁入锁紧孔中;所述同步驱动锁紧块的末端设置成斜面结构,以便于同步驱动锁紧块锁入到同步驱动孔。4.根据权利要求3所述的多轴运动位置同步控制方法,其特征在于,在步骤(3)完成后,还进一步包括步骤(4):第一运动体和第二运动体锁紧在一起形成整体向前同步运动过程中,第二运动体上的末端作业模块对第一运动体中的工件进行加工;与此同时,所述第二直线驱动机构保持原来的速度继续向前运动,使得直线移动座也与第二运动体同步运动;当末端作业模块对第一运动体中的工件加工完毕后,所述锁紧驱动机构带动锁紧栓离开锁紧
孔,并带动同步驱动锁紧块重新进入到同步驱动孔中,随后第二直线驱动机构带动第二运动体反向运动,恢复至初始位置,等待下一次作业。5.根据权利要求1-4任一项所述的多轴运动位置同步控制方法,其特征在于,所述第二运动体中,多轴驱动结构包括x轴运动驱动机构、y轴运动驱动机构以及z轴运动驱动机构,分别驱动末端作业模块在x轴方向、y轴方向以z轴方向运动,所述末端作业模块设置于x轴运动驱动机构上;在第一运动体和第二运动体锁紧在一起形成整体向前同步运动过程中,所述第一运动体和第二运动体达到相对位置关系确定且同步运动状态后,x轴运动驱动机构、y轴运动驱动机构以及z轴运动驱动机构驱动末端作业模块在三维空间内运动以对第一运动体上的工件进行加工。6.根据权利要求1所述的多轴运动位置同步控制方法,其特征在于,所述多轴驱动结构设置于移动架上,所述锁紧驱动机构固定于移动架上,第二直线驱动机构通过带动移动架运动,进而带动多轴驱动结构及末端作业模块运动。7.根据权利要求6所述的多轴运动位置同步控制方法,其特征在于,所述图像识别模块设置于移动架上,该图像识别模块的摄像头朝下设置,所述载光板设置于摄像头的正下方;所述载光板为半透明板,所述光源位于载光板的下方;所述光源在载光板板上投射出十字型光斑;所述图像识别模块将当前时刻光斑中心在载光板的位置与目标位置进行比较,并将两者的位置差数据传送给控制模块,与此同时,图像识别模块还将当前时刻光斑中心在载光板的位置与上一时刻光斑中心在载光板的位置进行比较,计算第一运动体和第二运动体的速度差数据,并将该速度差数据发送给给控制模块,第二直线驱动机构,所述给控制模块根据所述位置差数据和速度差数据实时调整控制参数,由第二直线驱动机构控制第二运动体的运动速速,使得光斑中心在载光板的位置往目标位置移动且最终让第一运动体和第二运动体的速度一致,达到第一运动体和第二运动体达到相对位置关系确定且同步运动状态;随后控制模块将控制信号发送到位置锁定装置,由位置锁定装置将第一运动体和第二运动体锁紧在一起。8.根据权利要求1所述的多轴运动位置同步控制方法,其特征在于,所述第二运动体为两组,相对设置于第一运动体的移动方向的两侧;所述第一运动体为多个,沿着移动方向均匀排列;当第一组第二运动体与对应的第一运动体同步运动并进行加工作业时,所述第二组第二运动体处于作业完毕并返回初始位置的状态,当第二组第二运动体与对应的第一运动体同步运动并进行加工作业时,所述第一组第二运动体处于作业完毕并返回初始位置的状态,即第一组第二运动体和第二组第二运动体交替进行作业,在一个加工周期内完成两个工件的加工。9.根据权利要求1所述的多轴运动位置同步控制方法,其特征在于,所述第二运动体为两组,沿着第一运动体的移动方向排列设置;所述第一运动体为多个,沿着移动方向均匀排列;当第一组第二运动体与对应的第一运动体同步运动并进行加工作业时,第二组第二运动体也与对应的第一运动体同步运动并进行加工作业;当所述第一组第二运动体处于作业完毕并返回初始位置的状态时,所述第二组第二运动体也处于作业完毕并返回初始位置的状态,即第一组第二运动体和第二组第二运动体同步作业,一个加工周期完成两个工件的加工。10.根据权利要求1所述的多轴运动位置同步控制方法,其特征在于,所述第一直线驱
动机构为同步带驱动机构,由电机、同步带轮以及同步带构成,所述第一运动体为工件座,该工件座固定连接于同步带上,所述光源设置于工件座上;所述同步带的两侧相对设置有两个导向槽,该导向槽的起始端设置有锥形导向口,所述工件座的两侧设置导向块,该导向块匹配于导向槽中,使得工件座在运动过程中严格按照直线轨迹运动。
技术总结
本发明公开一种多轴运动位置同步控制方法,包括以下步骤:(1)第一直线驱动机构带动第一运动体沿直线匀速运动;(2)第二直线驱动机构带动第二运动体作与第一运动体同方向的直线运动;在第一运动体和第二运动体之间设置同步追随模块使得第一运动体和第二运动体达到达到相对位置关系确定且同步运动状态;(3)当第一运动体和第二运动体达到相对位置关系确定且同步运动状态时,利用位置锁定装置将第一运动体和第二运动体锁定在一起,使得第一运动体和第二运动体锁紧在一起形成整体向前同步运动。本发明采用速度追踪同步和机械同步相结合的方式实现两个运动体的同步控制,形成严格的同步运动,在后续的移动过程中不会出现任何的速度误差。的速度误差。的速度误差。
技术研发人员:林成熙 欧东 陈磊
受保护的技术使用者:深圳市智鼎自动化技术有限公司
技术研发日:2022.08.29
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。