1.本技术涉及激光测距技术领域,尤其是涉及一种激光测距仪技术领域。
背景技术:
2.随着各个城市的高速发展,越来越多的高楼大厦拔地而起,因此对建筑施工的精准度要求越来越高,而精准测距是建筑施工必不可缺少的一个环节,通过对待测距离的精准测量,可以提高工程建筑的质量、降低施工成本及降低施工周期。
3.而在施工现场,尺子是最常用的测量工具。但由于施工现场的环境具有不确定性,测量人员经常会遇到测量距离较远以及测量距离较为复杂的情况,增加了测量人员的工作难度,降低了测量工作的效率。
技术实现要素:
4.为了降低测量人员的工作难度,提高测量工作的效率,本技术提供一种激光测距仪及方法。
5.本技术提供的一种激光测距仪,采用如下的技术方案:一种激光测距仪,包括承载平台、激光发射器以及角度测量器,所述承载平台上设置有支撑轴,所述激光发射器绕支撑轴转动,所述角度测量器用于测量所述激光发射器绕所述支撑轴转动的转动角度;所述激光发射器的转动平面与所述承载平台平行,且所述激光发射器能向靠近或者远离待测目标的方向移动。
6.通过采用上述技术方案,支撑轴的一端固定设置在承载平台上,支撑轴的另一端连接有激光发射器,激光发射器可向靠近或远离待测目标的方向移动,激光发射器还可以支撑轴为旋转轴转动,激光发射器转动的平面与承载平台的表面平行,角度测量器可用来测量激光发射器的转动角度,可对较远距离的待测目标进行检测,以及对不同环境下的检测目标进行检测,使测量距离的工作更加方便。
7.优选的,所述激光发射器还包括容纳所述激光发射器的外壳,所述外壳上内部开设有滑槽,所述激光发射器的侧面连接有滑块,所述滑块能携带所述激光发射器沿所述滑槽滑动。
8.通过采用上述技术方案,激光发射器设置在外壳的内部,在外壳的内部开设有滑槽,激光发射器的侧面固定连接在滑块上,激光发射器可随滑块沿着滑槽滑动。
9.优选的,所述激光发射器沿所述滑槽移动的距离为恒定值。
10.通过采用上述技术方案,滑块移动后的位置是固定的,其滑动距离为恒定值。
11.优选的,所述激光发射器沿滑槽移动的距离可测。
12.通过采用上述技术方案,激光器发射器的移动距离可测量。
13.优选的,所述支撑轴与所述承载平台垂直,所述外壳开设有贯穿孔,所述支撑轴穿设于所述贯穿孔。
14.通过采用上述技术方案,支撑轴的一端垂直固定在承载平台上,外壳上开设有贯
穿孔,支撑轴的另一端通过穿设于贯穿孔与外壳转动连接。
15.优选的,所述角度测量器包括刻度盘以及指针,所述刻度盘固定于所述支撑轴远离所述承载平台的一端,所述指针为l形,所述指针的一端与所述外壳固定,另一端弯折至所述刻度盘的表面上。
16.通过采用上述技术方案,角度测量器由刻度盘和指针构成,刻度盘设置为圆形,其圆心固定嵌套在支撑轴远离承载平台的一端,指针设计为l形,指针的一端固定连接在外壳上,另一端弯折端的指尖处于刻度盘表面。
17.优选的,所述激光发射器上连接有操作块,控制所述操作块以控制所述激光发射器沿滑槽滑动,所述操作块上设置有可以朝承载平台滑动的滑钉。
18.通过采用上述技术方案,激光发射器侧面连接的操作块,使用户可根据工作需求,通过操作块来控制激光发射器沿着滑槽滑动,在操作块远离激光发射器的一端的端面上还设置有滑钉,滑钉可朝靠近或远离承载平台的方向滑动。
19.优选的,所述外壳的外表面开设有滑孔与卡槽,所述操作块可在滑孔内滑动,所述滑钉能穿插于所述卡槽内。
20.通过采用上述技术方案,在外壳的表面设置有滑孔与卡槽,操作块贯穿于滑孔内,可沿滑孔的开设方向滑动,设置于操作块上的滑钉可穿插于卡槽内,可用来固定激光发射器的位置。
21.优选的,所述刻度盘上设置有0-90
°
的顺时针刻度与0-90
°
的逆时针刻度,所述0-90
°
的顺时针刻度与所述0-90
°
的逆时针刻度具有同一个0刻度线,并且以0刻度线为对称轴对称设置。
22.通过采用上述技术方案,在刻度盘朝向激光发射器的一面设置有0-90
°
的顺时针刻度与0-90
°
的逆时针刻度,0-90
°
的顺时针刻度与0-90
°
的逆时针刻度设置同一个0刻度线,并且0-90
°
的顺时针刻度与0-90
°
的逆时针刻度关于0刻度线对称设置。
23.优选的,所述激光测距仪还包括输入单元、数据处理单元以及输出单元,所述数据处理单元的两端分别与输入单元与输出单元电性连接,所述输入单元接收用户输入的转动角度及沿待测目标移动的距离,所述数据处理单元根据所述转动角度及沿待测目标移动的距离计算待测物体的长度,所述输出单元用于将所述的待测目标的长度输出。
24.通过采用上述技术方案,客户将所需的转动角度与沿待测目标移动的距离的数值信息输入至输入单元,输入单元根据将转动角度与沿待测目标移动的距离的数值信息传输至数据处理单元,数据处理单元根据传输的数据信息计算出待测距离的长度,提高了测量人员的工作效率。
25.综上所述,本技术包括以下至少一种有益技术效果:1.可对较远距离的待测目标进行检测,降低了测量人员的工作难度;2.可对不同环境下的检测目标进行检测,提高了测量人员工作的效率。
附图说明
26.图1是本技术实施例一种激光测距仪的结构示意图;图2是本技术实施例一种激光测距仪的外壳的竖直剖面图;图3是本技术实施例一种激光测距仪的刻度盘俯视图;
图4是本技术实施例一种激光测距方法的数据处理流程图;图5是本技术实施例一种激光测距方法的算法示意图。
27.附图标记说明:100、激光测距仪;1、承载平台;2、激光发射器;3、角度测量器;4、输入单元;5、数据处理单元;6、输出单元;7、待测目标;11、支撑轴;21、外壳;22、通光孔;23、贯穿孔;24、滑块;25、滑槽;26、操作块;27、滑孔;28、滑钉;29、卡槽;31、刻度盘;32、指针。
具体实施方式
28.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图1-5及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
29.本技术实施例公开一种激光测距仪100,该激光测距仪100通过将支撑轴11的一端固定设置在承载平台1上,支撑轴11的另一端连接有激光发射器2,激光发射器2可在支撑轴11上转动,激光发射器2可在支撑轴11上转动,激光发射器2转动的平面与承载平台1的表面平行,设置的角度测量器3可用来测量激光发射器2的转动角度。
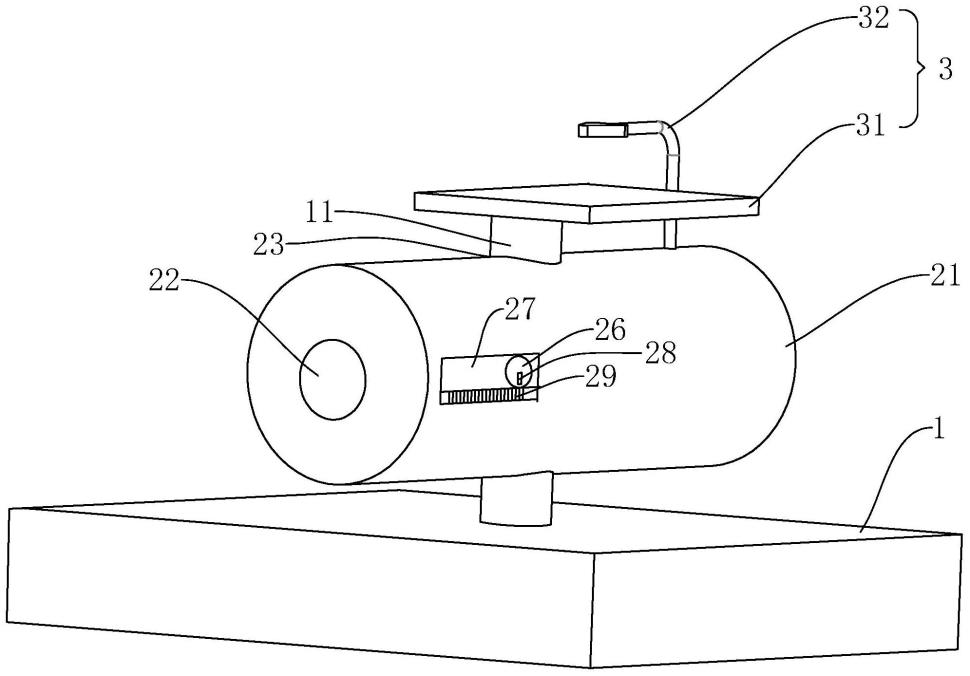
30.参照图1-3,一种激光测距仪100,包括承载平台1、激光发射器2、角度测量器3、输入单元4、数据处理单元5以及输出单元6。
31.承载平台1的形状可设置为长方体也可设置为柱形体,承载平台1的两个表面设置为互相平行的平面,在承载平台1的上表面的中央位置固定连接有支撑轴11,支撑轴11的形状设置为圆柱体,支撑轴11与承载平台1的表面垂直。
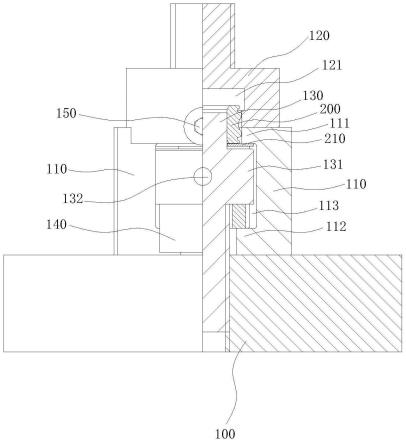
32.激光发射器2通过外壳21与承载平台1固定,具体地,外壳21垂直套设于支撑轴11上。外壳21为内部空心的柱体,也可将其设置为长方体,在外壳21的侧面开设有两个贯穿孔23,两个贯穿孔23相对设置且贯穿孔23设置为圆形,贯穿孔23的内径略大于支撑轴11的外径,外壳21通过贯穿孔23与支撑轴11转动连接,外壳21以支撑轴11为旋转轴转动,在其他实施方式中,外壳21以支撑轴11为旋转轴转动的方式,还可以通过操作模块与驱动模块实现,用户根据待测距离通过操作模块操控驱动模块,外壳21在驱动模块的驱动下,可绕支撑轴11转动。在外壳21平行于支撑轴11的侧面还设置有滑孔27,设置滑孔27用于手动实现激光发射器2向靠近待测目标7或者远离移动,待测目标7可为墙面、待测高度、杆体、管道、支撑柱及家具装饰品等,滑孔27的周围还设置有多个卡槽29,卡槽29包括两侧的柱体与其两侧之间的间隔,在滑孔27的靠近待测目标7的一端与远离待测目标7的一端各设置为半圆,多个卡槽29紧密排列,设置在滑孔27的靠近承载平台1的一侧,每个卡槽29的宽度可以设置为恒定值,两个卡槽29之间的间隔也为恒定值。在其他实施方式中,激光发射器2在外壳21中的移动还可以通过操作模块与驱动模块实现,用户根据测量需求,通过操作模块操控外壳21上的驱动模块带动激光发射器2向靠近或远离待测目标7的方向移动。
33.外壳21的内部位于贯穿孔23靠近待测目标7的一侧,设置有激光发射器2,激光发射器2为半导体激光器,可发射出肉眼可见的探测光斑;外壳21朝向待测目标7的端面的圆心位置还开设有通光孔22,通光孔22可以通过透明玻璃封闭。激光发射器2发出的光束经过通光孔22出射至待测目标7上。
34.激光发射器2设置为圆柱体,其输出端朝向通光孔22,在激光发射器2侧面靠近承载平台1的一侧,固定有滑块24,滑块24设置为长方体,滑块24远离激光发射器2的一端与滑
槽25滑动连接,滑槽25设置为长方体,其连接滑块24的一端设置有凹槽,滑块24位于凹槽内部,可在凹槽内向远离或靠近通光孔22的方向移动,滑槽25远离凹槽的一端固定在外壳21的内部,其固定方向与滑块24移动方向一致。
35.激光发射器2的外表面固定有操作块26,操作块26设置为圆柱体也可设置为棱柱体,操作块26远离激光发射器2的一端贯穿于滑孔27,操作块26的直径或宽度略小于滑孔27的宽度,操作块26远离激光发射器2的一端的端面上设置有可沿靠近或远离卡槽29方向滑动的滑钉28,滑钉28可设置为长条状,滑钉28的一部分可滑至卡槽29内,另一部分仍固定在操作块26的端面上,起到了固定激光发射器2的目的。
36.由于每个卡槽29的宽度为恒定值,用户可根据测量需求来控制滑钉28插入卡槽29的位置,也可以根据滑钉28插入卡槽29的位置来计算激光发射器2滑动的距离。
37.角度测量器3用于测量激光发射器2随外壳21绕支撑轴11转动的角度,角度测量器3包括刻度盘31与指针32,刻度盘31的一侧固定连接在支撑轴11远离承载平台1的一端,指针32呈l形,指针32的一端固定连接在外壳21远离通光孔22的一端的端面上,该端面为封闭的圆形,指针32的固定端固定在该端面的圆心,指针32的另一端呈弯折,位于刻度盘31的表面上。
38.刻度盘31设置为长方体,刻度盘31远离支撑轴11的一侧设置有刻度线与度数标识,刻度线设置为半圆形,刻度线分为两部分,其一刻度线设置为0-90
°
的顺时针刻度,其二刻度线设置为0-90
°
的逆时针刻度,其中0-90
°
的顺时针刻度与0-90
°
的逆时针刻度具有同一个0刻度线,并且以该0刻度线为对称轴对称设置。
39.参照图4,输入单元4接收用户输入的转动角度及沿待测目标7的移动距离,数据处理单元5根据转动角度及沿待测目标7的移动距离来计算待测目标7的长度,输出单元6用于将计算得出的待测距离输出;本方案将输入单元4、数据处理单元5以及输出单元6设置为计算器,通过计算器上设置的数字键盘输入转动的角度以及沿待测目标7移动的距离,计算器的数据处理芯片根据输入的转动的角度以及沿待测目标7移动的距离,计算出待测距离,计算器上的显示器接收数据处理芯片计算出的待测距离数据信号,并将其显示。
40.在其他实施方式中,一种激光测距仪100上可通过无线信号连接移动终端或计算机,用户根据移动终端与计算机上的应用程序,远程操作一种激光测距仪100对待测目标7的测量工作,读取偏转角度以及激光发射器2的移动距离,通过其自身携带的计算功能,计算出待测距离,并将待测距离信息通过显示器传递至用户。
41.本技术实施例一种激光测距仪100的实施原理为:通过将支撑轴11的一端固定设置在承载平台1上,支撑轴11的另一端连接有激光发射器2,激光发射器2可在支撑轴11上向靠近或远离待测目标7表移动,激光发射器2可在支撑轴11上转动,激光发射器2转动的平面与承载平台1的表面平行,设置的角度测量器3可用来测量激光发射器2的转动角度;用户通过输入单元4输入转动角度及沿待测目标7的移动距离,数据处理单元5根据用户输入的转动角度及沿待测目标7的移动距离根据几何关系计算出待测目标7的长度,输出单元6将计算得出的待测距离输出。在本实施例中,数据处理单元5可以是芯片,输入单元4及输出单元6可以是触控面板,数据处理单元5能与激光发射器2的控制器进行通信连接,输入单元4及输出单元6可以设置与外壳21上且与激光发射器2的控制器电性连接。
42.参照图5,本技术采用激光测距仪100,能用于测量任意两点之间的距离,任意两点
优选的是某个物体平整表面上的两点,所述的任意两点之间的距离优选是两点之间的直线距离,所述方法包括:s1:所述任意两点分别设定为起点标试点o1与终点标试点o2,起点标试点o1与终点标试点o2之间的距离为第一待测距离d,所述起点标试点o1与终点标试点o2之间的连线为第一直线。为增加后续激光投射位置的准确性,可以在起点标试点o1与终点标试点o2张贴标识;s2:选取第一待测距离d之间的任意一点作为初始点o3,激光发射器2发出的探测光入射至该点o3,并形成可见光斑,调整激光发射器2的位置,使所述激光发射器2发出的探测光束与第一直线垂直,从而设定此位置为激光发射器2的第一检测位置p1,所述第一检测位置p1与第一直线垂直的直线定义为法线;s3:偏转所述激光发射器至起点标试点o1,记录此时的激光发射器2从法线偏转至起点标试点o1的偏转角度为第一偏转角α;s4:偏转所述激光发射器2,使激光发射器2的探测光束位于所述法线上,沿着法线方向调整所述激光发射器2的位置至第二检测位置p2,所述第一检测位置p1与所述第二检测位置p2间的距离为预设距离d,第二检测位置p2至o3的垂直距离为第二待测距离l;由于所述激光发射器2沿所述滑槽25移动的距离为恒定值。或者是所述激光发射器2沿滑槽25移动的距离可测。从而预设距离d即是已知。
43.s5:偏转所述激光发射器2至起点标试点o1,记录此时的激光发射器2从法线偏转至起点标试点o1的偏转角度为第二偏转角β;s6:偏转所述激光发射器2,使激光发射器2的探测光束位于所述法线上,继续偏转所述激光发射器2至终点标试点o2,记录此时的激光发射器2从法线偏转至终点标试点o2的偏转角度为第三偏转角γ;s7:根据所述第一偏转角度α、第二偏转角度β、第三偏转角γ与所述预设距离d,分别计算出第二待测距离l,o
1 o3两点间的距离、且通过第二待测距离l计算出o
1 o3两点间的距离,并最终求出第一待测距离d。其计算过程通过如下三角函数关系式(1)-(3)获得:l
×
tan(β)=(l d)
×
tan(α)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)l=d
×
tan(α)/[tan(β)-tan(α)]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)d=l
×
[tan(β) tan(γ)]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)综上所述,通过本技术提供的激光测距仪100,采用激光发射器2捕捉待测目标7所在的表面或者由待测点确定的表面投射光斑,使激光发射器2发射的光束与待测目标7所在的表面垂直,然后再偏转激光发射器2向起点标试点o1投射光斑;使激光发射器2回归到与待测目标7所在的表面垂直,再向靠近物体的方向移动一预设距离d后再次向起点标试点o1投射光斑,采用激光发射器2再向终点标试点o2投射光斑,这样便可以计算激光发射器2的初始位置p1与初始点o3之间的距离,根据标记起点标试点o1、终点标试点o2,得出第一偏转角α、第二偏转角β、第三偏转角γ以及预设距离d,根据几何关系计算出第二待测距离l以及第一待测距离d。本方案采用的激光测距仪100具有激光射程较远,使得可对较远距离的目标进行检测,且激光的传播速度快也能较快的获得测量结果,降低了测量人员的工作难度;采用的激光的出射光功率很高,可与外界环境相比具有很高的辨识度,因此可对不同环境下的检测目标进行检测,提高了测量人员的工作效率。
[0044]
市面上的其他激光测距仪,采用的测距方法是激光器发射出探测光入射至待测物体表面,通过激光接收装置获取其反射光,记录激光的发射与接收的过程时间差,再利用激光的传播速度,计算出其激光的一半传播路程的即为待测距离。该激光测距仪100只能测量待测目标至激光器的距离,且激光测距仪需设置有计时器以及激光接收装置,而本方案无需计时器与激光接收装置,故本方案具有成本低的优势;另外本方案不止可以测量待测目标至激光器的距离,还可以测量待测目标到其他任一点间的距离,故其本方案还具有适用范围广的优势。
[0045]
所属领域的技术人员可以清楚地了解到,为了描述的方便和简洁,仅以上述各功能单元、模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能单元、模块完成,即将装置的内部结构划分成不同的功能单元或模块,以完成以上描述的全部或者部分功能。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。