1.本发明涉及建筑施工技术领域,更具体地说,涉及一种配合振冲施工的大直径潜孔锤引孔工艺方法。
背景技术:
2.振冲施工是在施工中用振冲密实法进行引孔,使用振冲器反复水平振动和冲水使周围土体在径向的一定范围内出现瞬间的结构破坏,抗剪强度降低, 土颗粒重新排列,相对密度提高,达到加固孔内壁的作用,为了使大直径潜孔锤引孔施工实现全自动施工控制系统,减少人力,提高工效,提出一种配合振冲施工的大直径潜孔锤引孔工艺方法。
技术实现要素:
[0003][0004]
1.要解决的技术问题
[0005]
针对现有技术中存在的问题,本发明的目的在于提供一种配合振冲施工的大直径潜孔锤引孔工艺方法,其优点在于在引孔施工过程中,减少人力消耗,提高工效。
[0006]
2.技术方案
[0007]
为解决上述问题,本发明采用如下的技术方案。
[0008]
一种配合振冲施工的大直径潜孔锤引孔工艺方法,包括s1、采集引孔地点处位于地下不同深度下的土壤,使用土壤分析仪对所述不同深度下的土壤进行分析,确定不同深度下的地质特点;
[0009]
s2、根据测试出的引孔地点不同深度的地质特点,确定大直径潜孔锤和辅助自动引孔设备的参数;
[0010]
s3、施工过程中,根据引孔地点的实际情况对自动引孔设备进行参数调整;
[0011]
s4、在施工的过程中,通过变频柜控制大直径潜孔锤动力头和自动引孔设备进行引孔,同时通过控制机构对自动引孔设备进行协同控制,辅助引孔施工;
[0012]
s5、将引孔施工数据上传到云数据平台。
[0013]
可选的,通过取样钻机配合螺旋钻杆、旋挖土壤采样钻具对引孔地点的土壤进行钻孔和取样,通过土壤分析仪处对取样的土壤进行检测,且根据检测出的地质特点选择对潜孔锤和自动引孔设备的参数进行调整。
[0014]
可选的,自动引孔设备包括桩机、空压机、潜孔锤、智能控制单元和控制机构。
[0015]
可选的,自动引孔设备通过所述智能控制单元进行控制,所述智能控制单元包括总控制端、智能控制模块、无线传输模块、运动信号传输模块和运动执行模块,所述智能控制模块连接于所述总控制端,所述无线传输模块连接于所述智能控制模块,所述运动信号传输模块连接于所述无线传输模块,所述运动执行模块连接于所述运动信号传输模块。
[0016]
可选的,所述总控制端用于对智能控制模块、无线传输模块、运动信号传输模块和运动执行模块进行全局的控制,所述智能控制模块用于处理并分析桩机和潜孔锤的运动方
向,所述无线传输模块用于将智能控制模块处理的桩机和潜孔锤的运动方向传输至所述运动信号传输模块,所述运动执行模块用于控制桩机执行智能控制模块发出的命令。
[0017]
可选的所述智能控制模块包括x轴控制模块和y轴控制模块,所述x轴控制模块用于处理桩机沿x轴运动的方向,所述y轴控制模块用于处理桩机沿y轴运动的方向。
[0018]
可选的,所述无线传输模块连接有云数据平台,所述云数据平台用于保存引孔的施工过程和数据。
[0019]
可选的,所述控制机构包括垂直度传感器、潜孔锤底部位置显示装置、引孔深度传感器、变频柜和电动执行器,所述垂直度传感器用于检测潜孔锤的与地面的垂直度,所述潜孔锤底部位置显示装置用于对潜孔锤底部与地面的情况进行观测和显示,所述引孔深度传感器用于在引孔施工过程中对潜孔锤进入地底的深度进行获取,所述变频柜用于控制电动执行器工作,启动执行器用于控制桩机调整潜孔锤的高度和位置,所述电动执行器连接于所述运动执行模块。
[0020]
3.有益效果
[0021]
相比于现有技术,本发明的优点在于:
[0022]
本方案通过智能控制模块的x轴控制模块和y轴控制模块计算潜孔锤的纵向和横向移动距离,并通过无线传输模块将智能控制模块计算的数据传递到运动信号传输模块,通过运动信号传输模块将计算数据的电信号传递到运动执行模块,通过运动执行模块给变频器输入指令,并通过变频器控制执行器控制桩机带动潜孔锤进行移动,进行辅助引孔,使大直径潜孔锤引孔施工实现全自动施工控制系统,减少人力消耗,提高工效。
附图说明
[0023]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图
[0024]
图1为本发明流程图;
[0025]
图2为本发明智能控制单元系统图;
[0026]
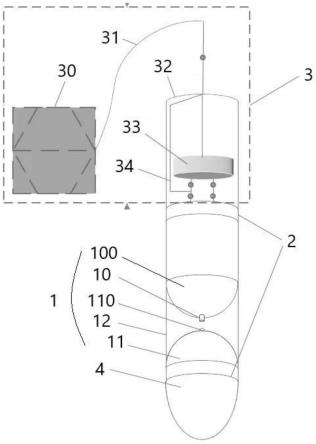
图3为本发明控制机构图。
[0027]
图中标号说明:
[0028]
1、总控制端;2、智能控制模块;3、x轴控制模块;4、y轴控制模块;5、云数据平台;6、无线传输模块;7、运动信号传输模块;8、运动执行模块;9、电动执行器;10、控制机构;11、垂直度传感器;12、潜孔锤底部位置显示装置;13、引孔深度传感器;14、变频柜。
具体实施方式
[0029]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0030]
请参阅图1-3,本实施方案中:
[0031]
实施例:潜孔锤进行引孔施工
[0032]
s1、采集引孔地点处位于地下不同深度下的土壤,使用土壤分析仪对所述不同深度下的土壤进行分析,确定不同深度下的地质特点;
[0033]
通过取样钻机配合螺旋钻杆、旋挖土壤采样钻具对引孔地点的土壤进行钻孔和取样土壤,结合地质情况,及深厚覆盖层的地层特点,选取不同参数的潜孔锤。其中,所述地质情况和地层特点又称为地质特点。所述地质特点按照地层形成过程的不同可分为两大类,包括:a.由构造运动所形成的复杂地层,由地质构造运动所产生的压力、张力、剪力等作用,使岩层产生节理、裂隙、裂缝、断层和片理,特别是硬或中硬以上的脆性岩石受构造力的剧烈破坏形成复杂地层;b.由外力地质作用所形成的复杂地层,即风化层、河流冲积层、洪积层,风积层。岩层经风化作用变为岩性较松散、胶结不良的风化层,而冲积、洪积、风积作用形成的各种沉积层一般含有粘土、流砂、卵石、砾石、漂石成为复杂的地层。
[0034]
s2、根据测试出的引孔地点不同深度的地质特点,确定大直径潜孔锤和辅助自动引孔设备的参数;
[0035]
本实例中,潜孔锤选择参数如下:
[0036]
最大钻孔直径、最大钻孔深度、外形尺寸、发动机参数、动力头、主卷扬、副卷扬、加压卷扬、钻桅倾角等。
[0037]
其中,最大钻孔直径为潜孔锤的钻孔直径;最大钻孔深度为潜孔锤的长度,动力头为能实现主运动和进给运动,并且有自动工件循环的动力部件;主卷扬用于升降钻具,同时还用来升降套管;副卷扬用于辅助主卷扬工作;加压卷扬用于对动力头进行加压;钻桅倾角为桅杆与垂直线之间的一个倾角,一般控制在15
°
左右。
[0038]
本实例桩机选择参数如下:
[0039]
最大压桩力(t)、主机最大工作油压、吊机最大工作油压、桩压速度档数、单次纵向位移、单次横向位移、单次转角、升降行程等,其中桩机的最大桩压力用于控制桩机的桩压速度和桩压行程;单次纵向位移和单次横向位移为桩机可控制潜孔锤的单次纵向和单次横向移动的行程;升降行程为桩机控制潜孔锤的升降距离;桩压速度档数为桩机工作时不同速度的调整。
[0040]
s3、施工过程中,根据引孔地点的实际情况对自动引孔设备进行参数调整;
[0041]
本实例中,在地质较硬的硬质岩层打孔时,最优的单次转角为11
°
左右,在调整桩机参数的时候,桩机的桩压速度档数可根据以下数据做出调整:
[0042]
覆盖层为40~60r/min;软岩为30~50r/min;中硬岩层为20~40r/min;硬岩层为10~-30r/min。
[0043]
在本实例中,例如在以灰岩(按成因分类属于沉积岩)为主要岩性的地质特点岩层打孔的时候,选用的桩机参数低转速档可为20r/min~40r/min,最大压桩力(t)可选800t,主机最大工作油压可选26mpa,吊机最大工作油压可选20mpa,最大理论桩压速度可为8.8m/min,桩压速度档数可选4级挡数,单次纵向位移可为3.5m,单次横向位移可为0.7m,单次转角可为11
°
;其中潜孔锤可选用选用中频、大冲击功的潜孔锤配硬质合金球齿钻头,转头配备规格可选:φ380、φ360、φ340、φ273、φ219、φ168几种。
[0044]
s4、在施工的过程中,通过变频柜(14)控制大直径潜孔锤动力头和自动引孔设备进行引孔,同时通过控制机构(10)对自动引孔设备进行协同控制,辅助引孔施工;
[0045]
请参阅图2,引孔设备通过智能控制单元进行控制,智能控制单元包括总控制端1、智能控制模块2、无线传输模块6、运动信号传输模块7和运动执行模块8,智能控制模块2连接于总控制端1,无线传输模块6连接于智能控制模块2,运动信号传输模块7连接于无线传输模块6,运动执行模块8连接于运动信号传输模块7。
[0046]
在本实例中,总控制端1用于对智能控制模块2、无线传输模块6、运动信号传输模块7和运动执行模块8进行全局的控制,例如控制智能控制模块2、无线传输模块6、运动信号传输模块7和运动执行模块8启动、关闭等,智能控制模块2用于处理并分析桩机和潜孔锤的运动方向,对无线传输模块6用于将智能控制模块2处理的桩机和潜孔锤的运动方向传输至运动信号传输模块7,运动执行模块8用于控制桩机执行智能控制模块2发出的命令,智能控制模块2包括x轴控制模块3和y轴控制模块4,x轴控制模块3用于处理桩机沿x轴运动的方向,y轴控制模块4用于处理桩机沿y轴运动的方向。
[0047]
引孔设备上安装有控制机构10,控制机构10包括垂直度传感器11、潜孔锤底部位置显示装置12、引孔深度传感器13、变频柜14和电动执行器9。
[0048]
请参阅图3,所述垂直度传感器11用于检测潜孔锤的与地面的垂直度。在一些实施例中,垂直度传感器11可选用,例如,垂直霍尔传感器。潜孔锤底部位置显示装置12用于对潜孔锤底部与地面的情况进行观测和显示。在一些实施例中,潜孔锤底部位置显示装置12可选用,例如,图像传感器。引孔深度传感器13用于在引孔施工过程中对潜孔锤进入地底的深度进行获取。在一些实施例中,深度传感器可选用激光深度传感器。变频柜14是应用变频器拖动动力装置的控制柜,变频柜14用于对电动机进行变频供电从而改变电动机的转速,通过对电动执行器9中的电动机变频供电以控制电动执行器9工作。电动执行器9用于控制桩机调整潜孔锤的高度和位置。电动执行器9连接于运动执行模块8。
[0049]
本实例中,激光深度传感器原理如下:
[0050]
激光深度传感器通过激光源发出一个脉冲,传感器检测到该脉冲在目标物体上的反射,以记录其飞行时间,通过光的恒定速度,系统可以计算出目标物体的距离。
[0051]
在引孔施工的过程中,通过潜孔锤底部位置显示装置12用于对潜孔锤底部与地面的情况进行观测和显示潜孔锤与预定的引孔位置,通过智能控制模块2的x轴控制模块3和y轴控制模块4计算潜孔锤的纵向和横向移动距离,并通过无线传输模块6将智能控制模块2计算的数据传递到运动信号传输模块7,通过运动信号传输模块7将计算数据的电信号传递到运动执行模块8,通过运动执行模块8给变频器输入指令,并通过变频器控制执行器控制桩机带动潜孔锤进行移动,进行辅助引孔。
[0052]
s5、将引孔施工数据上传到云数据平台(5);
[0053]
无线传输模块6连接有云数据平台5,云数据平台5用于保存引孔的施工过程相关的数据(例如,引孔施工过程中的视频数据、图像数据等),便于保存和后续查看。
[0054]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。