1.本发明涉及石油钻探设备技术领域,具体为一种石油钻机管柱自动化处理系统。
背景技术:
2.石油钻机是进行石油开采时的开采工具,它主要是进行钻井的钻探工作,现有国外的管柱自动化操作系统已实现管柱操作全过程的自动化,而国内在现有钻机上虽实现了局部的机械化,降低了工人的劳动强度,但尚未实现管柱操作全过程的自动化,未有效地发挥管柱自动化操作系统应有的技术优势;在专利cn107227934a公开了一种石油钻机管柱自动化处理系统,主要由钻台、井架和自动猫道机、动力鼠洞、转盘、钻台机械手、动力卡瓦、铁钻工、动力吊卡、二层台排管机械手、顶驱、绞车、司钻集成控制系统组成,配套到石油钻机后可实现接立柱、甩立柱;接单根、甩单根;钻进;存立根、取立根等钻井作业过程中管柱操作全过程的自动化;该系统虽然可提高钻机的自动化程度,解决现有钻井管柱操作方式存在高空、多人配合作业,劳动强度大、风险高、效率低的问题,一定程度解决人工操作动力绞车、自动猫道机输送效率低、能耗高的缺陷;但仍然存在的不足是:没有给出自动猫道机与地面钻杆台架之间是如何运行的,因此,需要人工将钻杆从地面钻杆台架上送至自动猫道机上,导致钻杆在使用和收回时存在不便的情况。
技术实现要素:
3.本发明的目的就在于为了解决现有的钻机管柱自动化处理系统存在的杆在使用和收回时存在不便,致使自动化程度低的问题,而提出一种石油钻机管柱自动化处理系统。
4.本发明总体技术路线是:通过调整钻杆组件的位置,使得出杆孔位于从动轮的上方,打开出杆孔上的盖板,钻杆通过输送组件送至机械夹爪,钻杆使用完成后,调整钻杆组件的位置,使得进杆孔的位置位于从动轮的下方,机械夹爪夹持钻杆,通过机械手臂带动机械夹爪运动,将钻杆运送至输送组件内的弧形板上,然后输送带工作,驱动电机带动齿轮一转动,且转动方向与使用时的方向相反;通过输送带将钻杆通过进杆孔落入存放槽内,从而更好地对钻杆进行回收和使用。
5.本发明的目的可以通过以下技术方案实现:一种石油钻机管柱自动化处理系统,包括钻台,钻台的台面上安装有支架,支架上安装有夹持组件,所述支架上位于夹持组件的一侧安装有挡板,挡板上开设有弧形槽,挡板的一侧安装有输送组件的一端,输送组件的另一端安装有钻杆组件。
6.夹持组件用于夹持钻杆,将钻杆运动到对应位置以及旋转钻杆使其管线的方向与钻井井线一致。
7.输送组件用于将钻杆组件内的钻杆输送弧形槽内。
8.钻杆组件包括存放单元、处理单元和驱动单元;存放单元用于对钻杆进行存放;处理单元用于接收指令信息并控制驱动单元带动钻杆转动。
9.作为本发明的一种优选方案,存放单元包括外壳,外壳的内部两端分别安装有主动辊一和从动辊一;主动辊一和从动辊一上安装有传送带一;传送带一上均匀安装有若干个夹板,相邻两个夹板与传送带一之间形成用于存放钻杆的存放槽,驱动单元安装在外壳内,处理单元安装在外壳上;外壳的上端面一端开设有进杆孔,外壳靠近输送组件的一侧开设有出杆孔,进杆孔和出杆孔内均安装有与其配合使用的盖板。
10.作为本发明的一种优选方案,存放槽的内壁底壁镶嵌有用于采集钻杆重量的称重传感器;外壳的底端面通过若干个升降杆安装在基座上;基座的底端面安装有若干个移动轮。
11.作为本发明的一种优选方案,输送组件包括主动辊二和从动辊二;主动辊二的两端均安装有主动轮,从动辊二的两端均安装有从动轮,主动轮和从动轮上安装有输送带,输送带上安装有等距分布的若干个弧形板,主动辊二的中部通过齿轮箱安装在三脚支撑板上,三脚支撑板安装在支架上,齿轮箱的内部安装有驱动电机,驱动电机的输出轴端安装有齿轮一,主动辊二上位于齿轮箱的内部焊接有齿轮二,齿轮一与齿轮二啮合连接,从动辊二的中部通过轴架固定在地面上。
12.作为本发明的一种优选方案,夹持组件包括安装在支架机械手臂及安装在机械手臂上用于夹持钻杆的机械夹爪;机械夹爪包括l形夹板,l形夹板的底端一体成型有下夹板,l形夹板的侧壁开设有若干个竖槽,竖槽的内部安装有导向柱,l形夹板的顶部安装有顶板,顶板上安装有伸缩组件,顶板与下夹板之间安装有活动上夹板,活动上夹板的上端面固定在伸缩组件的伸缩轴端;活动上夹板上开设有若干个导向孔,活动上夹板的一侧通过若干个导向孔安装在导向柱上。
13.作为本发明的一种优选方案,钻台的台面上还安装有总控箱,总控箱用于控制夹持组件、输送组件和钻杆组件运动。
14.作为本发明的一种优选方案,钻杆组件还包括清理模块;清理模块用于对存放槽内存储的钻杆两端接箍进行清理维护,包括拍摄单元、分析单元、冲洗单元和喷油单元;拍摄单元用于拍摄钻杆两端接箍的图片并发送至分析单元,分析单元对其进行分析。具体为:将同一接箍不同角度的图片进行放大得到像素格图片,识别每个像素格图片对应的颜色,将颜色与接箍对应的预设颜色进行比对,当像素格的颜色与预设颜色不同时,将像素格标记为异常像素格,统计同一接箍所有的异常行像素格的数量得到异常总数量;设定若干个冲洗时长,每个冲洗时长均对应一个数量范围,将异常总数量与数量范围进行匹配,当异常总数量在数量范围内,则将该数量范围对应的冲洗时长标记为接箍的冲洗时长;将接箍的冲洗时长发送至冲洗单元,冲洗单元接收到冲洗时长后,将接箍对应的清洗剂输送至接箍处并对接箍进行冲洗,且冲洗的时长等于接收到的冲洗时长;冲洗完成后,一段时间,分析单元发送喷油指令至喷油单元,喷油单元对接箍的表面进行喷涂防锈油。
15.与现有技术相比,本发明的有益效果是:1、本发明通过调整钻杆组件的位置,使得出杆孔位于从动轮的上方,打开出杆孔上的盖板,然后驱动单元带动主动辊一转动,从而带动传送带一转动,传送带一带动存放槽内的钻杆转动,当转动到出杆孔位置处时,停止转动,钻杆从存放槽滑落至输送带上的弧形板上;齿轮箱内部的驱动电机带动齿轮一转动,通过齿轮一与齿轮二啮合,使得主动辊二转动,从而通过主动轮带动输送带转动,继而将钻杆输送到弧形槽内,通过夹持组件内的机械
手臂带动机械夹爪运动钻杆前,使得钻杆位于活动上夹板与下夹板之间,通过伸缩组件带动活动上夹板向下运动,通过活动上夹板与下夹板进行夹持,在通过机械手臂带动机械夹爪运动至钻井井口的上方并带动机械加转旋转,使得钻杆的中心线与钻井井线一致;钻杆使用完成后,调整钻杆组件的位置,使得进杆孔的位置位于从动轮的下方,机械夹爪夹持钻杆,通过机械手臂带动机械夹爪运动,将钻杆运送至输送组件内的弧形板上,然后输送带工作,驱动电机带动齿轮一转动,且转动方向与使用时的方向相反;通过输送带将钻杆经进杆孔落入存放槽内,从而更好地对钻杆进行回收和使用。
16.2、本发明通过对接箍的表面进行图片分析得到对应的冲洗时长,进而实现对接箍进行冲洗和喷油,以便于使用后,对其进行维护保养,提高其使用寿命。
附图说明
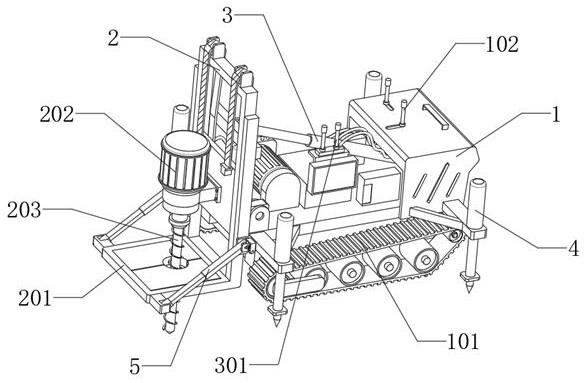
17.图1为本发明的整体结构示意图;图2为本发明的输送组件整体结构示意图;图3为本发明的齿轮箱内部结构示意图;图4为本发明的机械夹爪整体结构示意图;图5为本发明存放单元内部结构示意图;图6为本发明钻杆组件原理框图;图7为本发明清理模块原理框图;图8为本发明清理模块安装示意图;图9为本发明图8中a结构放大图;图10为本发明冲洗环结构示意图;图11为本发明出水孔一开设示意图;图12为本发明支撑座整体结构示意图。
18.附图标记:1、钻台;其中:11、支架;12、三脚支撑板;13、夹持组件;14、挡板;15、弧形槽;16、总控箱;131、机械夹爪;1311、l形夹板;1312、下夹板;1313、竖槽;1315、导向柱;1316、顶板;1317、活动上夹板;1318、导向孔;1320、伸缩组件。
19.2、输送组件;其中:201、主动辊二;202、从动辊二;203、主动轮;204、从动轮;205、输送带;206、弧形板;207、齿轮箱;2071、驱动电机;2072、齿轮一;2073、齿轮二。
20.3、钻杆组件;其中:301、外壳;302、主动辊一;303、从动辊一;304、传送带一;305、夹板;306、存放槽;307、进杆孔;308、出杆孔;309、升降杆;310、基座;311、移动轮;312、称重传感器;313、盖板。
21.4、清理模块,其中:41、拍摄架;411、摄像头;412、补光灯;421、冲洗环;4211、容腔一;4212、冲洗圆管;4213、冲洗喷头;4214、出水孔一;422、软管;423、水泵;424、清洗剂箱;425、排水管;431、喷油环;4311、容腔二;4312、喷油圆管;4313、喷油喷头;4314、出油孔一;432、油管;433、油泵;434、油箱;435、回收箱;44、控制盒;45、微型电动推杆;46、支撑座;461、出水孔二;462、出油孔二;463、管道接头一;464、管道接头二;465、安装孔;5、接箍。
具体实施方式
22.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.实施例1:请参阅图1所示,一种石油钻机管柱自动化处理系统,包括钻台1,钻台1的台面上安装有支架11,支架11上安装有夹持组件13。支架11上位于夹持组件13的一侧安装有挡板14。挡板14上开设有弧形槽15,弧形槽15和挡板14用于对钻杆进行限位和存放,以便于输送组件2将钻杆输送到挡板14上,挡板14的一侧安装在输送组件2顶端,输送组件2的下端安装有钻杆组件3。钻台1的台面上还安装有总控箱16,总控箱16用于控制夹持组件13、输送组件2和钻杆组件3运动。
24.请参阅图5所示,夹持组件13用于夹持钻杆,将钻杆运动到对应位置以及旋转钻杆使其管线的方向与钻井井线一致。夹持组件13包括安装在支架11上的机械手臂及安装在机械手臂上用于夹持钻杆的机械夹爪131。机械夹爪131包括l形夹板1311,l形夹板1311的底端一体成型有下夹板1312,l形夹板1311的侧壁开设有若干个竖槽1313。竖槽1313的内部安装有导向柱1315,l形夹板1311的顶部安装有顶板1316。顶板1316上安装有伸缩组件1320,顶板1316与下夹板1312之间安装有活动上夹板1317。活动上夹板1317的上端面固定在伸缩组件1320的伸缩轴端;活动上夹板1317上开设有若干个导向孔1318,活动上夹板1317的一侧通过若干个导向孔1318安装在导向柱1315上。伸缩组件1320为能实现伸缩功能的电动推杆。
25.请参阅附图2,输送组件2用于将钻杆组件3内的钻杆输送到弧形槽15内。输送组件2包括主动辊二201和从动辊二202。主动辊二201的两端均安装有主动轮203,从动辊二202的两端均安装有从动轮204,主动轮203和从动轮204上安装有输送带205。输送带205上安装有等距分布的若干个弧形板206,主动辊二201的中部通过齿轮箱207安装在三脚支撑板12上,三脚支撑板12安装在支架11上。
26.请参阅附图3,齿轮箱207的内部安装有驱动电机2071,驱动电机2071的输出轴端安装有齿轮一2072,主动辊二201上位于齿轮箱207的内部固定有齿轮二2073,齿轮一2072与齿轮二2073啮合连接。从动辊二202的中部通过轴架固定在地面上。
27.请参阅附图4,钻杆组件3包括存放单元、处理单元、驱动单元和感应单元。
28.其中,存放单元用于对钻杆进行存放,包括外壳301、升降杆309、基座310、移动轮311。外壳301的底部通过若干个升降杆309安装在基座310上;通过升降杆309调节外壳301的高度,基座310的底端面安装有若干个移动轮311,以便于钻杆使用或回收时移动。驱动单元安装在外壳301内,处理单元安装在外壳301上。
29.外壳301的内部两端分别安装有主动辊一302和从动辊一303;主动辊一302和从动辊一303上安装有传送带一304;传送带一304上均匀安装有若干个夹板305,相邻两个夹板305与传送带一304之间形成用于存放钻杆的存放槽306。外壳301的上端面一端开设有进杆孔307,外壳301靠近输送组件2的一侧开设有出杆孔308,进杆孔307和出杆孔308内均安装有与其配合使用的盖板313。
30.每个存放槽306内设置有称重传感器312,用于采集存放槽306内钻杆重量,以便于监控存放槽306内钻杆状态。感应单元用于监测存放槽306与进杆孔307或出杆孔308的位置,包括安装在夹板305顶端的信号发射器以及安装在进杆孔307或出杆孔308两侧的信号接收器。信号接收器接收信号发射器反馈的信号,以确定夹板305的位置,进而确定对应存放槽306的位置,方便控制存放槽306与进杆孔307或出杆孔308对齐。
31.处理单元接收指令信息并控制驱动单元带动钻杆转动。
32.请参阅附图6,总控箱16包括采集单元和控制单元(或称处理单元),控制单元通过无线与机械手臂、伸缩组件1320以及驱动电机2071、驱动单元和感应单元连接,以便于通过控制其工作,实现钻杆的自动化处理;采集单元用于采集存放槽306的位置以及存放槽306内是否存放钻杆。
33.在使用时,调整钻杆组件3的位置,使得出杆孔308位于从动轮204的上方,打开出杆孔308上的盖板313,然后驱动单元带动主动辊一302转动,从而带动传送带一304转动,传送带一304带动存放槽306内的钻杆转动,当转动到出杆孔308位置处时,停止转动,钻杆从存放槽306滑落至输送带205上的弧形板206上。齿轮箱207内部的驱动电机2071带动齿轮一2072转动,通过齿轮一2072与齿轮二2073啮合,使得主动辊二201转动,从而通过主动轮203带动输送带205转动,继而将钻杆输送到弧形槽15内,通过夹持组件13内的机械手臂带动机械夹爪131运动钻杆前,使得钻杆位于活动上夹板1317与下夹板1312之间,通过伸缩组件1320带动活动上夹板1317向下运动,通过活动上夹板1317与下夹板1312进行夹持,在通过机械手臂带动机械夹爪131运动至钻井井口的上方并带动机械夹爪131旋转,使得钻杆的中心线与钻井井线一致。
34.钻杆使用完成后,调整钻杆组件3的位置,使得进杆孔307的位置位于从动轮204的下方,机械夹爪131夹持钻杆,通过机械手臂带动机械夹爪131运动,将钻杆运送至输送组件2上,然后通过输送带205工作,驱动电机2071带动齿轮一2072转动,且转动方向与使用时的方向相反。通过输送带205将钻杆通过进杆孔307落入存放槽306内,从而更好地对钻杆进行回收和使用。
35.实施例2:请参阅图6-9所示,在本发明实施例1的基础上,钻杆组件3还包括清理模块4;清理模块4用于对存放槽306内存储的钻杆两端接箍5进行清理维护,包括拍摄单元、分析单元、冲洗单元和喷油单元;拍摄单元用于拍摄钻杆两端接箍5的图片并发送至分析单元,分析单元对其进行分析,具体为:将同一接箍5不同角度的图片进行放大得到像素格图片,识别每个像素格图片对应的颜色,将颜色与接箍5对应的预设颜色进行比对,当像素格的颜色与预设颜色不同时,将像素格标记为异常像素格,统计同一接箍5所有的异常行像素格的数量得到异常总数量;设定若干个冲洗时长,每个冲洗时长均对应一个数量范围,将异常总数量与数量范围进行匹配,当异常总数量在数量范围内,则将该数量范围对应的冲洗时长标记为接箍5的冲洗时长;将接箍5的冲洗时长发送至冲洗单元,冲洗单元接收到冲洗时长后,将接箍5对应的清洗剂输送至接箍5处并对接箍5进行冲洗,且冲洗的时长等于接收到的冲洗时长;冲洗完成后,一段时间,分析单元发送喷油指令至喷油单元,喷油单元对接箍5的表面进行喷涂防锈油;通过对接箍5的表面进行图片分析得到对应的冲洗时长,进而实现对接箍5进行冲洗和喷油,以便于使用后,对其进行维护保养,提高其使用寿命。
36.请参阅图10所示,拍摄单元包括拍摄架41,拍摄架41的内壁安装有若干个用于拍摄接箍5图片的摄像头411及与摄像头411一一对应的补光灯412,补光灯412用于摄像头411拍摄时进行补光,使得拍摄的图片更加清晰。
37.请参阅图10-11所示,冲洗单元包括冲洗环421,冲洗环421的内部设置有容腔一4211,容腔一4211的内部设置有冲洗圆管4212,冲洗圆管4212的内部设置若干个冲洗喷头4213,冲洗喷头4213与冲洗圆管4212贯通连接。冲洗圆管4212还与软管422的一端贯通连接,软管422的另一端与水泵423的出水口连接,水泵423安装在清洗剂箱424上并通过连接管与清洗剂箱424的内部贯通连接,以便于水泵423将清洗剂箱424内存放的清洗剂通过软管422输送至冲洗圆管4212内,并通过冲洗喷头4213喷出。冲洗环421的底部设置有出水孔一4214,以便于冲洗后的清洗剂经过容腔一4211汇聚后通过出水孔一4214流出。
38.请参阅图10-11所示,喷油单元包括喷油环431,喷油环431的内部设置有容腔二4311,容腔二4311的内部设置有喷油圆管4312,喷油圆管4312的内部设置若干个喷油喷头4313,喷油喷头4313与喷油圆管4312贯通连接。喷油圆管4312还与油管432的一端贯通连接,油管432的另一端与油泵433的出水口连接,油泵433安装在油箱434上并通过连接管与油箱434的内部贯通连接,以便于油泵433将油箱434存放的防锈油通过油管432输送至喷油圆管4312内,并通过喷油喷头4313喷出。喷油环431的底部设置有出油孔一4314,以便于喷涂后的多余防锈油经过容腔二4311汇聚后通过出油孔一4314流出。
39.请参阅图12所示,拍摄架41、冲洗环421和喷油环431的底端均安装在支撑座46上,支撑座46上设置有与出水孔一4214相对应的出水孔二461及与出油孔一4314相对应的出油孔二462;支撑座46的侧壁设置有与出水孔二461贯通连接的管道接头一463以及与出油孔二462贯通连接的管道接头二464,管道接头一463连接有排水管425的一端,排水管425的另一端连接至外壳301外,以便于排出冲洗后的清洗剂。管道接头二464连接有收集管的一端,收集管的另一端接入回收箱435内,以便于收集喷涂后的多余防锈油。回收箱435上安装有控制盒44,控制盒44的内部设置有分析单元。支撑座46上设置有安装孔465,安装孔465内安装有微型电动推杆45的一端,微型电动推杆45的另一端安装在油箱434上,以便于通过微型电动推杆45带动支撑座46前后运动,进而带动支撑座46上的拍摄架41、冲洗环421和喷油环431运动,以便于将拍摄架41、冲洗环421和喷油环431运动至接箍5上,从而实现对其进行拍摄、冲洗以及喷油操作。
40.在使用时,通过微型电动推杆45带动支撑座46向靠近接箍5方向运动,从而带动拍摄架41运动至接箍5上,通过摄像头411拍摄接箍5的图片并发送至分析单元;经分析单元分析得到冲洗时长并反馈至冲洗单元,水泵423将清洗剂箱424内存放的清洗剂通过软管422输送至冲洗圆管4212内,并通过冲洗喷头4213喷出,对接箍5进行冲洗;冲洗完成后,通过微型电动推杆45带动支撑座46向远离接箍5方向运动,传送带一304运动,对下一个钻杆进行清理,以此类推,一段时间后,如5小时,待接箍5表面自然晾干后,通过微型电动推杆45带动支撑座46向靠近接箍5方向运动,油泵433将油箱434存放的防锈油通过油管432输送至喷油圆管4312内,并通过喷油喷头4313喷出,对接箍5表面进行喷涂防锈油;再通过微型电动推杆45带动支撑座46向远离接箍5方向运动,传送带一304再次运动,切换下一个钻杆的接箍5。
41.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽
叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。