1.本发明涉及电力巡检技术领域,具体为一种地下电缆排管的嵌管修复机器人。
背景技术:
2.目前电力地下通道分为电缆隧道、电缆排管、电缆拉管和顶管。其中,电缆排管技术在国内外的电力地下通道中应用最为广泛。将电缆敷设于预先建好的地下排管中的安装方式称为电缆排管敷设。排管敷设适用于交通比较繁忙、地下走廊比较拥挤、敷设电缆条数较多的地段。排管和工井的位置,一般在城市道路的非机动车道,也有建设在人行道或机动车道。在排管和工井的土建一次完成之后,相同路径的电缆线路安装,可以不再重复开挖路面。
3.但是在电缆排管的使用过程中,由于管道积水、淤泥沉积以及管道破损等原因使得电缆排管堵塞的现象时有发生,因此需要对电缆排管进行及时有效地疏通和修复。传统疏通方法包括以下几种:1、依靠疏通器,即尼龙棒进行顶穿,再牵引将钢丝绳,通过钢丝绳来回拖拽疏通器来将障碍物拽出,该方法只适用于清理排管内的少量泥沙,对于大部分堵塞情况都是无法疏通的;2、水冲洗法,同样只是解决少量泥沙阻塞问题,对于管道错位、管道损坏、管道水泥块、石块、掉落封堵物等情况无法疏通,更无法解决管道损坏的修复问题;3、进行简单的探测,判定排管内有无障碍物,但是无法疏通及修复排管;4、将路面挖开至排管暴露出来,然后对破损排管进行修复更换、再进行填埋及重新铺路等工序。上述修复过程不仅操作复杂工期长,而且成本极高,又严重影响了用户报装接电进度及周围设施的使用,因此迫切需要一种先进的修复方法来取代传统的开挖修复方式。
4.综上,结合当前国内电力地下通道的堵塞情况和损坏情况,尚未形成一套完整的电缆排管疏通和修复体系。
5.当前,通过申请人的前期研发成果:2022109712063,一种地下电缆管道的清障修复机器人,已解决了地下电缆排管的阻塞疏通问题,但是排管阻塞原因多种多样,若其内部存在土石导致排管阻塞,则可以直接采用上述专利中的机器人进行挖掘修复;但是若排管阻塞的原因是其局部承重过大而部分塌陷,则使用上述机器人挖通排管后,将难以避免地造成排管管壁破损问题,此时若不对排管进行修补,则排管内部线缆将失去排管管壁的保护,使得管内渗水、管外漏电的事故频繁发生。
6.因此,如何在疏通排管后进行管壁的有效修补,避免漏水漏电事故发生,且保证排管的自然环境隔离效果,便成为本领域人员亟待解决的技术问题。
技术实现要素:
7.本发明的目的在于克服现有技术的不足之处,提供一种地下电缆排管的嵌管修复机器人,该机器人可高效地修复电力电缆排管的受损部位,保证排管的自然环境隔离功能,克服了传统排管疏通方法的操作复杂,工期长,成本高,且严重影响用户报装接电进度及周围设施使用的缺点。
8.一种地下电缆排管的嵌管修复机器人,该机器人轴向行驶在电缆排管的内部,机器人将柔性嵌管内撑安装于电缆排管破损处,该机器人包括机体及转臂;机体行驶方向的前端开口并活动插接转臂,且机体内部设有为转臂提供旋转动力的转动支点组件,以及为转臂提供径向摇摆动力的转动顶撑组件;转臂的前端同轴固接有喷胶管,转臂的前段周向套装有内撑于柔性嵌管内部的径向顶撑单元,转臂的中段制为带有花键并径向滑动且周向限位连接在转动支点组件内部的球形体,转臂的后段滑动套装有与转动顶撑组件径向顶撑连接的自适应套筒,且转臂的内部制出有气体连通径向顶撑单元的内腔。
9.优选的,机体的内部同轴固接有两个轴向限位环,该轴向限位环上分别轴向及径向限位且周向旋转连接转动支点组件和转动顶撑组件;机体的内壁上周向分布有多个为转动支点组件及转动顶撑组件提供同速同向旋转动力的通轴电机;通轴电机的两个动力输出端均同轴固接有主动齿轮。
10.优选的,转动支点组件包括与主动齿轮啮合连接的第一斜齿轮,该第一斜齿轮的中部同轴制出有套装在球形体外部且内壁开设有键槽的弧形孔;弧形孔的内壁弧度大于球形体的外壁弧度;键槽的内部沿球形体的轴向摇摆滑动并沿球形体的周向限位插接花键。
11.优选的,转动顶撑组件包括与主动齿轮啮合连接的第二斜齿轮,该第二斜齿轮上制出有轴向贯通并径向延伸的让位长孔,且第二斜齿轮的一个轴向端面上径向固设有电缸;让位长孔的内部轴向穿透插接自适应套筒及转臂;电缸的动力输出端径向支撑并铰装连接在自适应套筒的周向外壁上。
12.优选的,径向顶撑单元包括气柱筒、限位盘、波纹气囊及弧形撑板,其中气柱筒同轴固装在转臂的前段上,气柱筒的轴向两端同轴固接直径大于气柱筒的限位盘,且气柱筒上周向均布开设有多个连通转臂内腔的通气口;波纹气囊的进气端密封封堵通气口,且波纹气囊上粘接固定弧形撑板。
13.优选的,波纹气囊充气时,弧形撑板的外弧面径向内撑柔性嵌管直至柔性嵌管外壁与电缆排管内壁粘接贴合;波纹气囊放气时,弧形撑板的内弧面限位抱接在气柱筒的周向外壁上。
14.优选的,转臂的末端固设有连通内腔的气嘴以及连通喷胶管的油嘴,且转臂的内腔中设有连通喷胶管与油嘴的软管。
15.本发明的优点和技术效果是:本发明的一种地下电缆排管的嵌管修复机器人,通过排管内行驶的机体为转臂提供活动支撑,由转臂端部的喷胶管向排管内壁喷涂粘合剂,由转臂前段的径向顶撑单元挂载并径向支撑柔性嵌管,最后由第一斜齿轮与第二斜齿轮配合并同步同速旋转,即第一斜齿轮为转臂提供旋转动力,通过弧形孔孔壁及键槽与球形体外壁及花键的滑动配合,保证转臂在第一斜齿轮上的径向摇摆功能;并且第二斜齿轮为转臂提供摇摆动力,在摇摆的同时与第一斜齿轮转动配合,实现转臂前段的径向顶撑单元的环向360
°
顶撑或敲击功能,便于柔性嵌管完全张开成环形且粘接贴合在电缆排管破损处的内壁上,用以实现排管管壁的破损修复功能。
附图说明
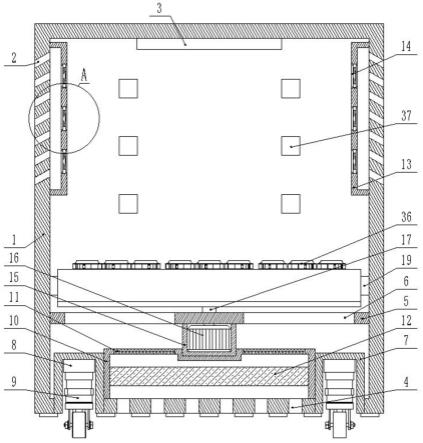
16.图1为本发明的主视图(局部剖视,波纹气囊放气姿态);
图2为本发明的剖视图(波纹气囊充气姿态);图3为本发明的转臂旋转顶撑及锤击姿态示意图(向上锤击姿态);图4为本发明的转臂旋转顶撑及锤击姿态示意图(向下锤击姿态);图5为图2中a-a截面的剖视图(挂载并顶撑柔性嵌管姿态);图6为图2中b-b截面的剖视图;图7为图2中c-c截面的剖视图;图8为图2中d处的局部放大图;图9为本发明中单片柔性嵌管的结构示意图;图中:1-喷胶管;2-转臂;3-径向顶撑单元;4-机体;5-弧形撑板;6-波纹气囊;7-气柱筒;8-限位盘;9-内腔;10-第一斜齿轮;11-球形体;12-通轴电机;13-电缸;14-自适应套筒;15-气嘴;16-油嘴;17-让位长孔;18-第二斜齿轮;19-主动齿轮;20-限位环;21-通气口;22-软管;23-花键;24-弧形孔;25-柔性嵌管。
具体实施方式
17.为能进一步了解本发明的内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下。需要说明的是,本实施例是描述性的,不是限定性的,不能由此限定本发明的保护范围。
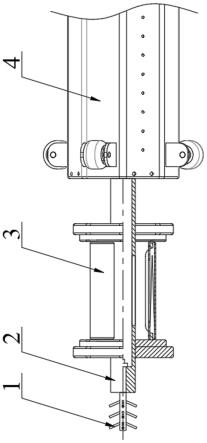
18.一种地下电缆排管的嵌管修复机器人,该机器人轴向行驶在电缆排管的内部,机器人将柔性嵌管25内撑安装于电缆排管破损处,该机器人包括机体4及转臂2;机体行驶方向的前端开口并活动插接转臂,且机体内部设有为转臂提供旋转动力的转动支点组件,以及为转臂提供径向摇摆动力的转动顶撑组件;转臂的前端同轴固接有喷胶管1,转臂的前段周向套装有内撑于柔性嵌管内部的径向顶撑单元3,转臂的中段制为带有花键23并径向滑动且周向限位连接在转动支点组件内部的球形体11,转臂的后段滑动套装有与转动顶撑组件径向顶撑连接的自适应套筒14,且转臂的内部制出有气体连通径向顶撑单元的内腔9。
19.优选的,机体的内部同轴固接有两个轴向限位环20,该轴向限位环上分别轴向及径向限位且周向旋转连接转动支点组件和转动顶撑组件;机体的内壁上周向分布有多个为转动支点组件及转动顶撑组件提供同速同向旋转动力的通轴电机12;通轴电机的两个动力输出端均同轴固接有主动齿轮19。
20.优选的,转动支点组件包括与主动齿轮啮合连接的第一斜齿轮10,该第一斜齿轮的中部同轴制出有套装在球形体外部且内壁开设有键槽的弧形孔24;弧形孔的内壁弧度大于球形体的外壁弧度;键槽的内部沿球形体的轴向摇摆滑动并沿球形体的周向限位插接花键。
21.优选的,转动顶撑组件包括与主动齿轮啮合连接的第二斜齿轮18,该第二斜齿轮上制出有轴向贯通并径向延伸的让位长孔17,且第二斜齿轮的一个轴向端面上径向固设有电缸13;让位长孔的内部轴向穿透插接自适应套筒及转臂;电缸的动力输出端径向支撑并铰装连接在自适应套筒的周向外壁上。
22.优选的,径向顶撑单元包括气柱筒7、限位盘8、波纹气囊6及弧形撑板5,其中气柱筒同轴固装在转臂的前段上,气柱筒的轴向两端同轴固接直径大于气柱筒的限位盘,且气柱筒上周向均布开设有多个连通转臂内腔的通气口21;波纹气囊的进气端密封封堵通气
口,且波纹气囊上粘接固定弧形撑板。
23.优选的,波纹气囊充气时,弧形撑板的外弧面径向内撑柔性嵌管直至柔性嵌管外壁与电缆排管内壁粘接贴合;波纹气囊放气时,弧形撑板的内弧面限位抱接在气柱筒的周向外壁上。
24.优选的,转臂的末端固设有连通内腔的气嘴15以及连通喷胶管的油嘴16,且转臂的内腔中设有连通喷胶管与油嘴的软管22。
25.另外,本发明优选的,机体的在排管内部轴向行驶,该机体的行驶动力可采用现有技术中的成熟技术手段实现,如申请人的前期研发成果:2022109712063,一种地下电缆管道的清障修复机器人,中的旋转顶推动力。
26.另外,本发明优选的,气嘴的进气端连接现有技术中的气泵,该气泵采用现有技术中的成熟技术手段安装在机器人的机体内部;同理油嘴的进胶端连接现有技术中的注浆泵,该注浆泵采用现有技术中的成熟技术手段安装在机器人的机体内部,并且气泵、注浆泵、电缸及通轴电机均采用现有技术中的成熟产品,其供电方式均采用现有技术中的成熟技术手段。
27.另外,本发明优选的,柔性嵌管结构如图5及图9所示,其可采用现有技术中的成熟产品,可为双瓣式的分体结构,亦可为多瓣式的铰接结构。
28.为了更清楚地描述本发明的具体实施方式,下面提供一种实施例:本发明的一种地下电缆排管的嵌管修复机器人,其待修复的电缆排管默认已通过2022109712063,一种地下电缆管道的清障修复机器人,专利中的清障修复机器人开掘,即排管截面为圆形,且排管管壁已发生破损。
29.本发明的一种地下电缆排管的嵌管修复机器人,其修复方法包括以下步骤:步骤1:嵌管修复机器人驶入电缆排管前需先保持波纹气囊的放气状态,即使弧形撑板抱接在气柱筒外壁上,而后将尚未完全张开的柔性嵌管挂接在径向顶撑单元的弧形撑板上,此时弧形撑板及柔性嵌管将由气柱筒两端的限位片进行轴向限位,避免机器人行驶过程中柔性嵌管由径向顶撑单元上脱落;步骤2:机体行驶至预定的排管修复位置时(喷胶管环向对应排管破损位置),启动通轴电机,由其两端的主动齿轮带动第一斜齿轮及第二斜齿轮旋转,进而带动转臂在机体上同轴旋转;而后启动注浆泵,将粘合剂经软管及喷胶管环向均匀喷涂在排管及排管破损处的内壁上;步骤3:机体前行使径向顶撑单元对应排管破损位置,而后启动气泵经气嘴、内腔及通气口向波纹气囊内通气,多个波纹气囊以气柱筒为轴心对称顶撑弧形撑板,进而撑开弧形撑板上挂载的柔性嵌管,直至柔性嵌管的外壁与喷涂完粘合剂的排管内壁粘接贴合;步骤4:当步骤3进行完成后,柔性嵌管的局部对称部位已与排管内壁粘接牢固,而后循环启动气泵抽排波纹气囊内的气体,同时启动通轴电机,并往复启动电缸,由电缸带动转臂径向摇摆,进而实现转臂前段的径向顶撑单元的敲击挤压动作;同时配合第一斜齿轮的旋转,实现径向顶撑单元的360
°
环向敲击,用以保证柔性嵌管的充分展开以及与排管内壁的充分粘接。
30.步骤5:柔性嵌管完全张开并粘接固定在电缆排管内部之后,波纹气囊放气,机体原路后退直至脱离电缆排管,进而完成一次地下电缆排管管壁修复作业的全部流程。
31.需要注意的是:1、自适应套筒用于将电缸的径向支撑力传导至转臂上,并且为防止转臂摇摆过程中与电缸及第二斜齿轮发生结构自锁,故自适应套筒应滑动套装在转臂上,包括轴向及周向的相对滑动连接方式;2、由于自适应套筒并未对转臂进行轴向限位,并且球形体亦可在第二斜齿轮的弧形孔内部径向摇摆滑动(亦非转臂的轴向限位),故为避免转臂由机体前端开口轴向脱落,特在球形体的两端设置限位结构,该限位结构可与气柱筒两端的限位盘相同,其直径大于弧形孔两端直径,由该限位结构与第一斜齿轮的两个轴向端面配合,实现转臂轴向位移过程中带有径向摇摆余量的轴向位移极限限位。
32.最后,本发明的未尽述之处均采用现有技术中的成熟产品及成熟技术手段。
33.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。