1.本发明涉及电缆消防领域,尤其涉及一种基于多传感器融合的电缆消防联动系统。
背景技术:
2.随着城市化的发展,输变配电线路电缆化越来越多,例如35kv-220kv变电站内高压电缆、变电站外的高压电缆、10kv配网电缆等,而最容易发生电缆火灾的区域为电缆沟,电缆沟中的电缆在运行中的监控通过值班员日常巡视,手段单一,且无法直接进行观察,对于电缆发生火灾或运行过程中的不安全隐患较难及时发现;电缆沟起火隐蔽性强,影响范围大,抢修恢复时间长,一旦发生可能会造成较为严重的后果;电缆火灾除了造成电缆损坏,还可能造成设备跳闸、减供负荷、甚至对救火人员造成伤害等严重的后果;不但会给经济带来严重损失,而且会扰乱广大居民和企业的正常生活、生产秩序;针对上述情况,出现了电缆沟内的电缆监测消防系统,主要是通过温度传感器、烟雾传感器、视屏监测传感器、湿度传感器等对电缆沟内的电缆进行监测,然后再对监测的信号信息融合计算,评估出电缆的状态,然而此类电缆监测消防系统,存在一定的缺陷,各类传感器需要时刻的运作,尤其是视屏监测传感器,拍摄视屏时需要耗费电量,因此续航存在一定的缺陷,需要对各个传感器进行频繁的电池更换,仍然不利于电缆的智能监控和消防。
技术实现要素:
3.本发明的目的是提供一种基于多传感器融合的电缆消防联动系统,设置温度传感器、烟雾报警器、多个图片拍摄器和安装在无人机上的高清摄像器,并对各个传感器的信号进行优先级编号,如此即可利用多个传感器的配合实现电缆监控的同时克服了传感器长时间工作导致的耗电过快的缺陷。
4.为了实现以上目的,本发明采用的技术方案为:一种基于多传感器融合的电缆消防联动系统,包括沟壁、沟腔和与沟腔连通的检查梯,所述的沟腔内设置有不少于三个电缆架,电缆架上安装有电缆,每个电缆架的中心设置有烟雾报警器,且每个电缆架上设置有与其上安装的电缆配合的温度传感器,沟壁处于两个电缆架之间的部位设置有与电缆垂直走向的图片拍摄器,所述的沟腔的底部设置有灭火机器人和无人机,所述的无人机上安装有向上摄像的高清摄像头,烟雾报警器、温度传感器、图片拍摄器、灭火机器人、无人机和高清摄像头均通过无线通讯与中控模块无线连通,烟雾报警器和图片拍摄器拍摄的信号用于中控模块控制灭火机器人的动作,温度传感器、图片拍摄器和无人机及其上的高清摄像头初始均为定时运作,且温度传感器和图片拍摄器的时间间隔均为2h-3h,无人机及其上的高清摄像头时间间隔为5-10d,且温度传感器和图片拍摄器的信号用于中控模块紧急控制无人机及其上的高清摄像头运作。
5.本技术方案的技术效果为:设置温度传感器、烟雾报警器、多个图片拍摄器和安装在无人机上的高清摄像器,耗电量极小的烟雾报警器无间断的工作,可以对突发的火灾起
到监控作用和灭火信号发出的作用,而耗电量较小的图片拍摄器和温度传感器则为2-3h间隔工作,耗电量大的无人机及高清摄像头则为5-10d的间隔工作,正常情况下,可以持续很长时间的监测,而温度传感器和图片拍摄器的信号用于中控模块紧急控制无人机及其上的高清摄像头运作,则可以根据温度和拍摄的图片初步分析电缆的老化状况,然后再根据高清摄像头对电缆的外皮进行摄像,通过电缆上的裂痕进一步的判断电缆的风险状况,对电缆的状态进行监控和评估,如此即可利用多个传感器的配合实现电缆监控的同时克服了传感器长时间工作导致的耗电过快的缺陷。
6.优选的,所述的电缆架上通过固定的卡线块安装电缆,且电缆成v形对称设置在电缆架上。
7.优选方案的技术效果为:电缆在电缆架上的安装位置,可以使电缆相互之间的影响降低,在灭火及时的情况下,使单根电缆的起火不会波及旁边的电缆。
8.优选的,处于两个电缆架之间的区域的两个沟壁上均设置有图片拍摄器,且图片拍摄器的高度一致并错位分布。
9.优选方案的技术效果为:图片拍摄器的位置设计,可以拍摄到所有电缆的状态(是否出现下坠)。
10.优选的,所述的沟壁的内壁设置有机器人遮挡块,且机器人遮挡块上表面为斜面,所述的机器人遮挡块的下方的沟底上设置有机器人安装块,所述的机器人安装块处于机器人遮挡块正下方的部分为平板,超出机器人遮挡块正下方的部分为向外下倾斜的斜板,灭火机器人安置在机器人安装块的平板上。
11.优选方案的技术效果为:将灭火机器人安置在机器人安装块上,可以通过机器人遮挡块对上部进行防水,能够通过机器人安装块避免沟壁下部积水影响到灭火机器人。
12.优选的,所述的灭火机器人包括机器人主体,机器人主体内设置有电池组用于供电,所述的机器人主体的下部两侧设置有机器人安装侧板,所述的机器人安装侧板的内侧安装有带有驱动电机的轮子,所述的机器人主体的左侧开设有侧面开口的灭火罐安装腔,灭火罐安装腔内设置有灭火罐安装框,所述的灭火罐安装框内放置有灭火罐,所述的灭火罐通过管道结构与机器人主体上设置的灭火喷管连通;所述的管道结构包括安装在机器人主体内并由电池组供电的灭火通断阀,灭火通断阀的上部与灭火喷管连通,灭火通断阀的下部通过软管连接有灭火连接套,灭火连接套与灭火罐的出口部分套接配合。
13.优选方案的技术效果为:灭火机器人的灭火罐安装腔内能够安装灭火罐,同时也方便灭火罐的更换,并且能够通过管道结构的具体设计,能够实现灭火罐内的灭火材料从灭火喷管喷出。
14.优选的,所述的沟腔的底部设置有滑轨,所述的机器人安装块的底部开设有与滑轨配合的安装块滑槽。
15.优选方案的技术效果为:滑轨和安装块滑槽的设计,能够对灭火机器人的进行轨迹进行限定,进而起到更好的灭火效果。
16.优选的,所述的滑轨的两个侧面设置有滑轨弧形块,且滑轨弧形块与安装块滑槽的内壁相切配合,且安装块滑槽的内壁嵌入有能与滑轨弧形块接触并产生计数信息的感应计数器,滑轨上的滑轨弧形块为均匀分布,且间距为200mm,且滑轨两侧的滑轨弧形块为错分设置,错分的间距为100mm。
17.优选方案的技术效果为:通过感应计数器和滑轨弧形块的设计中,且滑轨弧形块的间距为200mm,两侧的滑轨弧形块错分间距为100mm,如此可以根据感应计数器产生信号精准的得出灭火机器人进行的距离,能够精确到100mm,如此根据产生烟雾报警的烟雾报警器和图片拍摄器拍摄的图片使灭火机器人精准的进行到灭火位置进行灭火。
18.优选的,所述的机器人主体的侧面还开设有无人机安装口,所述的无人机包括无人机主体,所述的高清摄像头安装在无人机主体的上部,所述的无人机主体的下部设置有无人机支架和无人机充电柱,所述的无人机支架的下部为竖直块,所述的无人机安装口的下表面中心设置有与机器人主体内的电池组连通的无人机充电插块,且无人机安装口的下表面还开设有与无人机支架的竖直部分插接配合的支架槽,无人机支架完全插入到支架槽时,无人机充电柱与无人机充电插块电性连通并给无人机充电,与机器人遮挡块相对的沟壁上设置有用于放置无人机的无人机保护框。
19.优选方案的技术效果为:无人机安装口及无人机充电插块的设计,可以通过灭火机器人的电池给无人机充电,提高无人机的续航能力。
附图说明
20.图1为一种基于多传感器融合的电缆消防联动系统的灭火模式示意图。
21.图2为一种基于多传感器融合的电缆消防联动系统健康评估模式示意图。
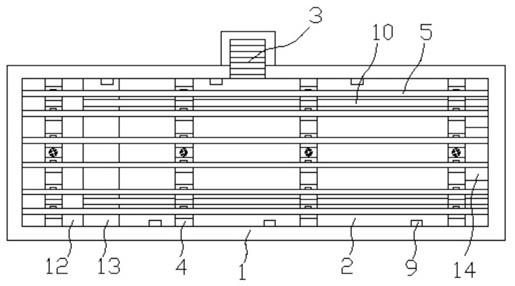
22.图3为一种基于多传感器融合的电缆消防联动系统的电缆沟部分的俯视图。
23.图4为单个电缆架的俯视图。
24.图5为单个电缆架的侧视图。
25.图6为一种基于多传感器融合的电缆消防联动系统电缆沟部分的剖视图。
26.图7为灭火机器人部分的结构示意图。
27.图8为机器人安装侧板与滑轨的配合示意图。
28.图9为图7中a的局部放大图。
29.图中所示文字标注表示为:1、沟壁;2、沟腔;3、检查梯;4、电缆架;5、电缆;6、卡线块;7、温度传感器;8、烟雾报警器;9、图片拍摄器;10、滑轨;11、灭火机器人;12、机器人遮挡块;13、机器人安装块;14、无人机保护框;21、机器人主体;22、机器人安装侧板;23、轮子;24、灭火罐安装框;25、灭火罐;26、灭火连接套;27、灭火通断阀;28、灭火喷管;29、滑轨弧形块;30、安装块滑槽;31、感应计数器;33、无人机安装口;34、无人机主体;35、高清摄像头;36、无人机支架;37、无人机充电柱;38、无人机充电插块。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.如图1-3所示,本技术提供的一种基于多传感器融合的电缆消防联动系统,包括沟壁1、沟腔2和与沟腔连通的检查梯3,所述的沟腔2内设置有不少于三个电缆架4,电缆架4上安装有电缆5,其特征在于,每个电缆架4的中心设置有烟雾报警器8,且每个电缆架4上设置
有与其上安装的电缆5配合的温度传感器7,沟壁处于两个电缆架4之间的部位设置有与电缆5垂直走向的图片拍摄器9,所述的沟腔2的底部设置有灭火机器人11和无人机,所述的无人机上安装有向上摄像的高清摄像头35,烟雾报警器8、温度传感器7、图片拍摄器9、灭火机器人9、无人机和高清摄像头35均通过无线通讯与中控模块无线连通,烟雾报警器8和图片拍摄器9拍摄的信号用于中控模块控制灭火机器人9的动作,温度传感器7、图片拍摄器9和无人机及其上的高清摄像头35初始均为定时运作,且温度传感器7和图片拍摄器9的时间间隔均为2h-3h,无人机及其上的高清摄像头35时间间隔为5-10d,且温度传感器7和图片拍摄器9的信号用于中控模块紧急控制无人机及其上的高清摄像头35运作。
32.本技术的电缆消防联动系统的具体运作如下:初始状态时,温度传感器7和图片拍摄器9间隔2h-3h进行一次运作,并将测出的温度和拍摄的图片传递给中控模块,无人机及其上的高清摄像头35时间间隔为5-10d运作一次,对电缆沟内的电缆进行视屏拍摄,并将拍摄的视屏内容传递给中控模块,烟雾报警器8则时刻处于运作状态,上述传感器件的运作,配合中控模块,会出现两种模式,其一为灭火模式,如图1所示,如线缆突发火灾,这种情况根据线缆的状态进行评估很难得到,起火处会产生烟雾,进而烟雾报警器产生烟雾报警信号并传递给中控模块,中控模块则会控制处于此烟雾报警器两侧的图片拍摄器紧急启动拍摄,并将拍摄的结果通过无线通讯传递给中控模块,中控模块可以得到准确的起火位置,然后控制灭火机器人9启动进行灭火操作;其二为健康评估模式,如图2所示,主要是电缆自然老化所致,电缆为正常运作,每隔2-3小时通过温度传感器7测量电缆的温度,通过图片拍摄器拍摄电缆的状态,分析温度是否在安全区间,电缆是否出现下坠等,每隔5-10d则通过无人机带动高清摄像头35对电缆进行摄像,通过拍摄的视屏判断电缆单位面积的裂痕数和裂痕大小,进而评估出电缆的健康状态,如果温度是不在安全区间或者电缆是出现下坠,则紧急启动无人机带动高清摄像头35对电缆进行摄像,通过拍摄的视屏判断电缆单位面积的裂痕数和裂痕大小,进而评估出电缆的健康状态;如此对电缆的老化情况进行了监控,对电缆的突发火灾起到了及时的确定位置及灭火的效果,且耗电量较大的传感器件的间隔运作,可以提高整个系统的监控续航性能,无需频繁人工检测及更换传感器件等。
33.如图4-5所示,所述的电缆架4上通过固定的卡线块6安装电缆5,且电缆5成v形对称设置在电缆架4上。
34.采用卡线块6对电缆5进行限位,确保电缆5的位置不会偏移,且所有电缆5成v形分布,可以减小相邻电缆的相关性系数,配合本技术的灭火操作,可以避免单根电缆起火后影响到相邻的电缆。
35.如图3所示,处于两个电缆架4之间的区域的两个沟壁1上均设置有图片拍摄器9,且图片拍摄器9的高度一致并错位分布。
36.图片拍摄器9的分布,可以从两个方向拍摄电缆架4上的电缆5的状态,如此可以对v形分布的电缆完全拍摄,并且还能够根据拍摄的照片进行比对分析,正常状态下,同一高度的电缆5在图片中应该处于重合状态,如果没重合,则证明至少有一根电缆处于下坠状态。
37.如图6所示,所述的沟壁1的内壁设置有机器人遮挡块12,且机器人遮挡块12上表面为斜面,所述的机器人遮挡块12的下方的沟底上设置有机器人安装块13,所述的机器人安装块处于机器人遮挡块12正下方的部分为平板,超出机器人遮挡块12正下方的部分为向
外下倾斜的斜板,灭火机器人11安置在机器人安装块13的平板上。
38.由于沟壁1上的盖板不能完全防水,在下雨天,沟腔2内必然会有水,虽然沟底会配备排水系统,但是灭火机器人11直接放置在沟底依然会存在雨水造成的损伤,本技术将灭火机器人11设置在机器人安装块13上,沟底的积水一般很难影响到灭火机器人,而从盖板处滴落的雨水,则会被机器人遮挡块12拦截,依然不会落到灭火机器人11上,因此可以确保灭火机器人不会收到雨水的伤害。
39.如图6所示,所述的灭火机器人21包括机器人主体21,机器人主体21内设置有电池组用于供电,所述的机器人主体21的下部两侧设置有机器人安装侧板22,所述的机器人安装侧板22的内侧安装有带有驱动电机的轮子23,所述的机器人主体21的左侧开设有侧面开口的灭火罐安装腔,灭火罐安装腔内设置有灭火罐安装框24,所述的灭火罐安装框24内放置有灭火罐25,机器人主体21内安装有由电池组供电的灭火通断阀27,灭火通断阀27的上部与灭火喷管28连通,灭火通断阀27的下部通过软管连接有灭火连接套26,灭火连接套26与灭火罐25的出口部分套接配合。
40.灭火机器人通过电池组给驱动电机供电,进而驱动轮子23转动,使整个机器人进行到灭火位置,然后再通过电池组给灭火通断阀27供电,灭火通断阀27在进行灭火操作时会打开,如此灭火罐25内的灭火物质(泡沫灭火剂等)会经过灭火连接套26、软管、灭火通断阀27后从灭火喷管28喷出,进而进行灭火,在完成灭火后,需要对灭火机器人进行灭火罐的更换,具体是将灭火连接套26与灭火罐25的出口松开,然后将灭火罐25从灭火罐安装框24内取出,并放入新的灭火罐25,然后再将灭火罐的出口与灭火连接套26连通,并拉开灭火罐的出口阀,使灭火通断阀27成为灭火物质是否喷出的控制阀门;灭火机器人中会设置单独的灭火控制器,用于无线接收中控模块的信号并控制驱动电机和灭火通断阀27的动作。
41.如图7-8所示,所述的沟腔2的底部设置有滑轨10,所述的机器人安装块13的底部开设有与滑轨10配合的安装块滑槽30,所述的滑轨10的两个侧面设置有滑轨弧形块29,且滑轨弧形块29与安装块滑槽30的内壁相切配合,且安装块滑槽30的内壁嵌入有能与滑轨弧形块29接触并产生计数信息的感应计数器31,滑轨10上的滑轨弧形块29为均匀分布,且间距为200mm,且滑轨10两侧的滑轨弧形块29为错分设置,错分的间距为100mm。
42.在具体的应用中,烟雾报警器8和图片拍摄器9会反馈出精准的火灾位置,根据火灾的位置,中控模块会分析出灭火机器人行进距离,如需要灭火机器人行进2300mm后进行灭火,灭火机器人11的控制器接收到信号后会使驱动电机带动轮子23行进,在进行的过程中两侧的感应计数器31会持续的产生感应信号,首先也会设定最先信号的感应计数器31产生的第一个计数感应信号时,灭火机器人行进了200mm,那么行进2300mm则是先产生计数感应器31产生10个感应信号后,后产生的计数感应器31也产生10个感应信号后则停止行进,如此可以确保灭火机器人行进了2300mm,通过烟雾报警器8图片拍摄器9会反馈出精准的火灾位置,通过灭火机器人与滑轨的配合实现精准的灭火机器人行进,如此可以对起火部位进行精准灭火,确保灭火效果和灭火的速度。
43.如图7和图9所示,所述的机器人主体21的侧面还开设有无人机安装口33,所述的无人机包括无人机主体34,所述的高清摄像头35安装在无人机主体34的上部,所述的无人机主体4的下部设置有无人机支架36和无人机充电柱37,所述的无人机支架36的下部为竖直块,所述的无人机安装口33的下表面中心设置有与机器人主体21内的电池组连通的无人
机充电插块38,且无人机安装口33的下表面还开设有与无人机支架36的竖直部分插接配合的支架槽,无人机支架36完全插入到支架槽时,无人机充电柱37与无人机充电插块38电性连通并给无人机充电,与机器人遮挡块12相对的沟壁上设置有用于放置无人机的无人机保护框14。
44.无人机在运行的情况下,耗电量会比较大,即使是间隔5-10d运行一次,其续航时间相对温度传感器7和图片拍摄器9依然会存在较大的差别,而本技术将无人机和灭火机器人配合设计,可以通过灭火机器人的电池组给无人机进行充电,进而提升无人机的续航能力,相对的也可以提高整个基于多传感器融合的电缆消防联动系统的续航能力,充电的具体操作是无人机先进入到无人机安装口33内,然后再使无人机下降,使无人机支架36的竖直部分完全插入到支架槽内,如此即可实现无人机充电插块38与无人机充电柱37的电性连通,进而对无人机进行充电。
45.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
46.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实例的说明只是用于帮助理解本发明的方法及其核心思想。以上所述仅是本发明的优选实施方式,应当指出,由于文字表达的有限性,而客观上存在无限的具体结构,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进、润饰或变化,也可以将上述技术特征以适当的方式进行组合;这些改进润饰、变化或组合,或未经改进将发明的构思和技术方案直接应用于其它场合的,均应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。