1.本实用新型属于消防技术领域,具体涉及一种消防灭火机器人。
背景技术:
2.随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高,若火灾发生时没有有效的消防应急预案、合适的灭火救援设施及装备,消防员强行进入火灾现场采取灭火行动,不仅达不到预期效果,而且还会给救援人员的生命安全带来严重威胁,因此,利用灭火设备来代替消防人员进行救援作业成为首选,现有的灭火设备在使用时只能安装在固定的位置对固定高度固定范围内的火灾进行扑灭,无法进行多方位的灭火,灭火效率低。
技术实现要素:
3.本实用新型所要解决的技术问题在于针对上述现有技术中的不足,提供一种消防灭火机器人,其结构简单、设计合理,通过设置行走机构带动车体外壳在待灭火区域行走,对待灭火区域进行全方位灭火,解决了现有灭火设备只能安装在固定位置对待灭火区域灭火的问题,灭火效果好;通过设置灭火雾化喷嘴对灭火器内的灭火剂进行雾化后喷洒至待灭火区域,灭火效率高;通过设置安装调节座为灭火雾化喷嘴提供安装位置,并实现灭火雾化喷嘴喷洒方向和喷洒高度的调节,便于该机器人对待灭火区域进行灭火,灭火范围广,便于推广使用。
4.为解决上述技术问题,本实用新型采用的技术方案是:一种消防灭火机器人,其特征在于:包括机器人车体、均设置在所述机器人车体上且用于灭火的灭火机构和用于监测所述机器人车体周围环境的监测模块;
5.所述机器人车体包括车体外壳和设置在车体外壳下部且用于带动车体外壳移动的行走机构;
6.所述灭火机构包括设置在车体外壳内的灭火器、与灭火器连接且用于喷洒灭火器内灭火剂的灭火雾化喷嘴,以及设置在车体外壳顶部且用于调节灭火雾化喷嘴喷洒高度和喷洒方向的安装调节座;
7.所述监测模块包括均设置在车体外壳顶部的红外避障模块、监控摄像头和箱体,所述箱体内设置有电子线路板,所述电子线路板上集成有微控制器和与微控制器相接的无线通信模块,所述红外避障模块的输出端与微控制器的输入端连接,所述监控摄像头的输出端与无线通信模块相接。
8.上述的一种消防灭火机器人,其特征在于:所述行走机构包括均设置在车体外壳下部的前行走轮和后行走轮,以及用于驱动后行走轮行走的行走驱动电机,所述前行走轮、后行走轮和行走驱动电机的数量均为两个,两个所述后行走轮与两个行走驱动电机一一对应,所述行走驱动电机由微控制器进行控制。
9.上述的一种消防灭火机器人,其特征在于:所述安装调节座包括设置在车体外壳
顶部的方向调节筒和与方向调节筒铰接的高度调节筒,以及用于驱动方向调节筒转动的第一驱动器和用于驱动高度调节筒转动的第二驱动器。
10.上述的一种消防灭火机器人,其特征在于:所述方向调节筒与车体外壳呈垂直布设,所述方向调节筒包括筒体和设置在筒体底部的环形卡板,以及多个设置在环形卡板底部的齿槽,多个所述齿槽沿环形卡板的圆周方向布设在环形卡板的底部;
11.所述第一驱动器包括设置在车体外壳内的第一驱动电机,以及套设在第一驱动电机的输出轴上且与齿槽啮合的驱动齿轮,所述第一驱动电机由微控制器进行控制。
12.上述的一种消防灭火机器人,其特征在于:所述车体外壳的顶板上开设有用于连通车体外壳和方向调节筒的通孔,所述通孔的内侧壁上沿其圆周方向开设有供环形卡板安装的卡槽,所述环形卡板与所述卡槽滑动配合。
13.上述的一种消防灭火机器人,其特征在于:所述高度调节筒通过销轴与方向调节筒铰接,所述方向调节筒与销轴转动配合,所述高度调节筒与销轴固定连接;
14.所述第二驱动器包括设置在方向调节筒上的第二驱动电机,所述第二驱动电机由微控制器进行控制,所述销轴套设在第二驱动电机的输出轴上。
15.上述的一种消防灭火机器人,其特征在于:所述灭火雾化喷嘴通过导管与灭火器连通,所述导管上设置有用于控制导管内液体流通的电磁阀,所述电磁阀由微控制器进行控制。
16.上述的一种消防灭火机器人,其特征在于:所述灭火雾化喷嘴设置在高度调节筒内,且灭火雾化喷嘴伸出高度调节筒。
17.本实用新型与现有技术相比具有以下优点:
18.1、本实用新型通过设置行走机构带动车体外壳在待灭火区域行走,灭火机构安装在车体外壳上,车体外壳移动带动灭火机构移动,便于该机器人在待灭火区域移动对待灭火区域进行全方位灭火,解决了现有灭火设备只能安装在固定位置对待灭火区域灭火的问题,灭火效果好。
19.2、本实用新型通过设置灭火雾化喷嘴对灭火器内的灭火剂进行雾化后喷洒至待灭火区域,灭火剂通过灭火雾化喷嘴形成细水雾,细水雾均匀喷洒在待灭火区域,细水雾表面积大,可以快速汽化,能够充分的吸收待灭火区域的热量,快速降低待灭火区域的温度,同时,细水雾成为雾滴后,雾滴受热汽化形成水蒸气,可以使待灭火区域的燃烧物周围空气中的氧浓度降低,使燃烧因缺氧而受抑制或中断,实现快速灭火,灭火效率高。
20.3、本实用新型通过设置安装调节座为灭火雾化喷嘴提供安装位置,安装调节座包括方向调节筒和高度调节筒,以及用于驱动方向调节筒转动的第一驱动器和用于驱动高度调节筒转动的第二驱动器,通过第一驱动器驱动方向调节筒转动调节灭火雾化喷嘴的喷洒方向,通过第二驱动器驱动高度调节筒转动调节灭火雾化喷嘴的喷洒高度,进而实现灭火雾化喷嘴喷洒方向和喷洒高度的调节,丰富了灭火雾化喷嘴喷洒方向的可调节性,便于该机器人对待灭火区域进行灭火,灭火范围广。
21.综上所述,本实用新型结构简单、设计合理,通过设置行走机构带动车体外壳在待灭火区域行走,对待灭火区域进行全方位灭火,解决了现有灭火设备只能安装在固定位置对待灭火区域灭火的问题,灭火效果好;通过设置灭火雾化喷嘴对灭火器内的灭火剂进行雾化后喷洒至待灭火区域,灭火效率高;通过设置安装调节座为灭火雾化喷嘴提供安装位
置,并实现灭火雾化喷嘴喷洒方向和喷洒高度的调节,便于该机器人对待灭火区域进行灭火,灭火范围广。
22.下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
附图说明
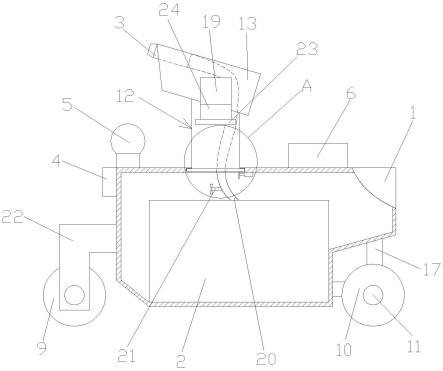
23.图1为本实用新型的结构示意图。
24.图2为图1的仰视图。
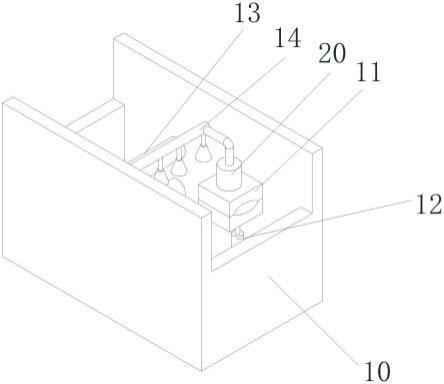
25.图3为图1中的a处局部放大图。
26.图4为本实用新型筒体、高度调节筒、销轴、第二驱动电机、安装板和垫块的连接关系示意图。
27.图5为方向调节筒和第一驱动器的连接关系示意图。
28.图6为本实用新型的电路原理框图。
29.附图标记说明:
30.1—车体外壳;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—灭火器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3—灭火雾化喷嘴;
31.4—红外避障模块;
ꢀꢀꢀꢀꢀꢀ
5—监控摄像头;
ꢀꢀꢀꢀꢀꢀꢀꢀ
6—箱体;
32.7—微控制器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8—无线通信模块;
ꢀꢀꢀꢀꢀꢀ
9—前行走轮;
33.10—后行走轮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11—行走驱动电机;
ꢀꢀꢀꢀꢀ
12—方向调节筒;
34.12-1—筒体;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12-2—环形卡板;
ꢀꢀꢀꢀꢀꢀꢀ
12-3—齿槽;
35.13—高度调节筒;
ꢀꢀꢀꢀꢀꢀꢀ
14—第一驱动电机;
ꢀꢀꢀꢀꢀ
15—驱动齿轮;
36.16—通孔;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17—后连接杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18—销轴;
37.19—第二驱动电机;
ꢀꢀꢀꢀꢀ
20—导管;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21—电磁阀;
38.22—前连接杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23—安装板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24—垫块。
具体实施方式
39.如图1至图6所示,本实用新型包括机器人车体、均设置在所述机器人车体上且用于灭火的灭火机构和用于监测所述机器人车体周围环境的监测模块;
40.所述机器人车体包括车体外壳1和设置在车体外壳1下部且用于带动车体外壳1移动的行走机构;
41.所述灭火机构包括设置在车体外壳1内的灭火器2、与灭火器2连接且用于喷洒灭火器2内灭火剂的灭火雾化喷嘴3,以及设置在车体外壳1 顶部且用于调节灭火雾化喷嘴3喷洒高度和喷洒方向的安装调节座;
42.所述监测模块包括均设置在车体外壳1顶部的红外避障模块4、监控摄像头5和箱体6,所述箱体6内设置有电子线路板,所述电子线路板上集成有微控制器7和与微控制器7相接的无线通信模块8,所述红外避障模块4的输出端与微控制器7的输入端连接,所述监控摄像头5的输出端与无线通信模块8相接。
43.本实施例中,需要说明的是,通过设置行走机构带动车体外壳1在待灭火区域行走,便于该机器人在待灭火区域移动对待灭火区域进行全方位灭火,解决了现有灭火设备只能安装在固定位置对待灭火区域灭火的问题;灭火雾化喷嘴3对灭火器2内的灭火剂进行雾化后喷洒至待灭火区域,灭火剂通过灭火雾化喷嘴3形成细水雾,细水雾均匀喷洒在待灭
火区域,细水雾表面积大,可以快速汽化,能够充分的吸收待灭火区域的热量,快速降低待灭火区域的温度,同时,细水雾成为雾滴后,雾滴受热汽化形成水蒸气,可以使待灭火区域的燃烧物周围空气中的氧浓度降低,使燃烧因缺氧而受抑制或中断,实现快速灭火,灭火效果好;灭火雾化喷嘴3安装在所述安装调节座上,通过设置安装调节座为灭火雾化喷嘴3提供安装位置,安装调节座包括方向调节筒12和高度调节筒13,以及用于驱动方向调节筒12转动的第一驱动器和用于驱动高度调节筒13转动的第二驱动器,通过第一驱动器驱动方向调节筒12转动调节灭火雾化喷嘴3的喷洒方向,通过第二驱动器驱动高度调节筒13转动调节灭火雾化喷嘴3的喷洒高度,进而实现灭火雾化喷嘴3喷洒方向和喷洒高度的调节,丰富了灭火雾化喷嘴3喷洒方向的可调节性,便于该机器人对待灭火区域进行灭火,灭火范围广。
44.本实施例中,红外避障模块4安装在车体外壳1的顶部,且红外避障模块4位于车体外壳1的前侧板上,通过设置红外避障模块4对该机器前方的障碍物进行检测,避免该机器人在前进过程中撞击障碍物,提高该机器人的可靠性;监控摄像头5安装在车体外壳1顶部,通过设置监控摄像头5对车体外壳1周围的环境进行视频数据采集,并通过无线通信模块8 将监控摄像头5采集到的视频数据远程传输给监控终端,便于工作人员远程查看待灭火区域内的火势情况进行消防部署,有效避免消防人员进入待灭火区域查看火势,安全性好。
45.本实施例中,实际使用时,红外避障模块4优选为e18-d80nk避障传感器模块,监控摄像头5优选为ov7670摄像头模块,微控制器7优选为 pic18f46k22为微控制器,无线通信模块8优选为atheros ar9331wi-fi 模块,所述监控终端为手机或计算机。
46.本实施例中,所述灭火器2内的灭火剂可选择为水、冷气溶胶或二氧化碳。
47.如图1、图2和图6所示,本实施例中,所述行走机构包括均设置在车体外壳1下部的前行走轮9和后行走轮10,以及用于驱动后行走轮10 行走的行走驱动电机11,所述前行走轮9、后行走轮10和行走驱动电机 11的数量均为两个,两个所述后行走轮10与两个行走驱动电机11一一对应,所述行走驱动电机11由微控制器7进行控制。
48.本实施例中,每个所述后行走轮10均通过一个后连接杆17与车体外壳1的下部固定连接,每个所述前行走轮9均通过一个前连接杆22与车体外壳1的下部固定连接,两个所述后行走轮10与两个行走驱动电机11 一一对应,通过行走驱动电机11驱动后行走轮10移动,后行走轮10移动带动前行走轮9移动,进而带动车体外壳1移动。
49.本实施例中,所述后连接杆17和所述前连接杆22均为l形连接杆,所述行走驱动电机11为42byght8步进电机。
50.如图1所示,本实施例中,所述安装调节座包括设置在车体外壳1顶部的方向调节筒12和与方向调节筒12铰接的高度调节筒13,以及用于驱动方向调节筒12转动的第一驱动器和用于驱动高度调节筒13转动的第二驱动器。
51.本实施例中,通过设置第一驱动器调节方向调节筒12的方向,进而调节方向调节筒12顶部高度调节筒13的朝向,实现高度调节筒13内灭火雾化喷嘴3喷洒方向的调节;通过设置第二驱动器调节高度调节筒13 的高度,进而调节高度调节筒13内灭火雾化喷嘴3的安装高度,实现灭火雾化喷嘴3喷洒高度的调节。
52.如图1、图3、图4、图5和图6所示,本实施例中,所述方向调节筒 12与车体外壳1呈垂直布设,所述方向调节筒12包括筒体12-1和设置在筒体12-1底部的环形卡板12-2,以及
多个设置在环形卡板12-2底部的齿槽12-3,多个所述齿槽12-3沿环形卡板12-2的圆周方向布设在环形卡板 12-2的底部;
53.所述第一驱动器包括设置在车体外壳1内的第一驱动电机14,以及套设在第一驱动电机14的输出轴上且与齿槽12-3啮合的驱动齿轮15,所述第一驱动电机14由微控制器7进行控制。
54.本实施例中,所述筒体12-1与车体外壳1呈垂直布设,筒体12-1与环形卡板12-2呈同轴布设,操作第一驱动电机14工作,第一驱动电机14 的输出轴顺时针转动带动驱动齿轮15顺时针转动,驱动齿轮15顺时针转动带动环形卡板12-2沿其轴线逆时针转动,环形卡板12-2逆时针转动带动筒体12-1逆时针转动,筒体12-1逆时针转动转动带动高度调节筒13 逆时针转动,高度调节筒13逆时针转动带动高度调节筒13内的灭火雾化喷嘴3逆时针转动;第一驱动电机14的输出轴逆时针转动带动驱动齿轮 15逆时针转动,驱动齿轮15逆时针转动带动环形卡板12-2沿其轴线顺时针转动,环形卡板12-2顺时针转动带动筒体12-1顺时针转动,筒体12-1 顺时针转动转动带动高度调节筒13顺时针转动,高度调节筒13顺时针转动带动高度调节筒13内的灭火雾化喷嘴3顺时针转动,实现灭火雾化喷嘴3喷洒方向的调节。
55.本实施例中,第一驱动电机14为42byght8步进电机。
56.如图1和图3所示,本实施例中,所述车体外壳1的顶板上开设有用于连通车体外壳1和方向调节筒12的通孔16,所述通孔16的内侧壁上沿其圆周方向开设有供环形卡板12-2安装的卡槽,所述环形卡板12-2与所述卡槽滑动配合。
57.本实施例中,通过在车体外壳1的顶板上开设通孔16,便于导管20 连接灭火雾化喷嘴3和灭火器2,通孔16的内侧壁上开设有卡槽,环形卡板12-2卡装在所述卡槽内,所述卡槽对环形卡板12-2进行限位,实现方向调节筒12与车体外壳1的连接,且环形卡板12-2与所述卡槽滑动配合,实现方向调节筒12与车体外壳1的转动配合。
58.如图1、图4和图6所示,本实施例中,所述高度调节筒13通过销轴 18与方向调节筒12铰接,所述方向调节筒12与销轴18转动配合,所述高度调节筒13与销轴18固定连接;
59.所述第二驱动器包括设置在方向调节筒12上的第二驱动电机19,所述第二驱动电机19由微控制器7进行控制,所述销轴18套设在第二驱动电机19的输出轴上。
60.本实施例中,方向调节筒12的顶端开设有供销轴18穿过的第一连接孔,所述高度调节筒13的一端开设有供销轴18穿过的第二连接孔,销轴 18穿设在第一连接孔和第二连接孔上,实现方向调节筒12和高度调节筒 13的铰接,所述第一连接孔的内侧面与销轴18的外侧面之间设置有间隙,所述第一连接孔的内侧面与销轴18的外侧面焊接,便于第二驱动电机19 的输出轴转动带动销轴18转动,进而带动高度调节筒13转动,对灭火雾化喷嘴3的安装高度进行调节,进而实现灭火雾化喷嘴3喷洒高度的调节。
61.本实施例中,实际使用时,微控制器7控制第二驱动电机19工作,第二驱动电机19的输出轴顺时针转动带动销轴18顺时针转动,销轴18 顺时针转动带动高度调节筒13顺时针转动,高度调节筒13顺时针转动使高度调节筒13远离销轴18的端部向上移动,进而使灭火雾化喷嘴3向上移动;第二驱动电机19的输出轴逆时针转动带动销轴18逆时针转动,销轴18逆时针转动带动高度调节筒13逆时针转动,高度调节筒13逆时针转动使高度调节筒13远离销轴18的端部向下移动,进而使灭火雾化喷嘴 3向下移动,实现灭火雾化喷嘴3安装高度的调节。
62.本实施例中,方向调节筒12的外侧壁上设置有安装板23,安装板23 上设置有垫块24,第二驱动电机19安装在垫块24上,通过设置安装板 23便于在方向调节筒12转动时带动第二驱动电机19转动;通过设置垫块 24使第二驱动电机19的输出轴的轴线与销轴18的轴线位于同一直线上,便于将销轴18套设在第二驱动电机19的输出轴上,第二驱动电机19为 42byght8步进电机。
63.如图1和图6所示,本实施例中,所述灭火雾化喷嘴3通过导管20 与灭火器2连通,所述导管20上设置有用于控制导管20内液体流通的电磁阀21,所述电磁阀21由微控制器7进行控制。
64.如图1所示,本实施例中,所述灭火雾化喷嘴3设置在高度调节筒13 内,且灭火雾化喷嘴3伸出高度调节筒13。
65.本实施例中,灭火雾化喷嘴3伸出高度调节筒13,在高度调节筒13 对灭火雾化喷嘴3进行保护的同时,避免高度调节筒13遮挡灭火雾化喷嘴3而影响灭火雾化喷嘴3的喷洒效果。
66.本实用新型具体使用时,当发生火灾时,首先,微控制器7控制两个行走驱动电机11同时工作,行走驱动电机11同时工作带动后行走轮10 移动,后行走轮10移动带动前行走轮9移动,进而带动该机器人移动使该机器人进入待灭火区域;其次,微控制器7控制电磁阀21打开,灭火器2内的冷却剂通过导管20输送至灭火雾化喷嘴3,灭火雾化喷嘴3对冷却剂进行雾化并喷洒至该机器人周围,对该机器人周围的火苗进行扑灭,同时,监控摄像头5对车体外壳1周围的环境进行视频数据采集,微控制器7通过无线通信模块8将监控摄像头5采集到的视频数据远程传输给监控终端;最后,工作人员根据监控摄像头5采集到的视频数据中的火势情况,控制行走驱动电机11工作使该机器人移动,并观察该机器人周围火苗的燃烧方向,通过微控制器7控制第一驱动电机14工作带动方向调节筒12转动,进而带动灭火雾化喷嘴3转动,对灭火雾化喷嘴3的喷洒方向进行调节,使灭火雾化喷嘴3喷洒出的细水雾能够有效扑灭该机器人周围的火苗;观察该机器人周围火苗的燃烧高度,通过微控制器7控制第二驱动电机19工作带动高度调节筒13转动,进而带动灭火雾化喷嘴3上下移动,对灭火雾化喷嘴3的喷洒高度进行调节,使灭火雾化喷嘴3喷洒出的细水雾能够有效扑灭该机器人周围的火苗。本实用新型结构简单、设计合理,通过设置行走机构带动车体外壳在待灭火区域行走,对待灭火区域进行全方位灭火,解决了现有灭火设备只能安装在固定位置对待灭火区域灭火的问题,灭火效果好;通过设置灭火雾化喷嘴对灭火器内的灭火剂进行雾化后喷洒至待灭火区域,灭火效率高;通过设置安装调节座为灭火雾化喷嘴提供安装位置,并实现灭火雾化喷嘴喷洒方向和喷洒高度的调节,便于该机器人对待灭火区域进行灭火,灭火范围广。
67.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型作任何限制,凡是按照本实用新型技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本实用新型技术方案的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。