1.本发明属于岩体开挖技术领域,特别涉及基于机械切割与弹丸侵彻组合装置的联合破岩方法及装置。
背景技术:
2.随着经济的不断发展,我国地下空间工程项目日益增多,特别是以川藏铁路为代表的一系列长大隧道群以及大规模深埋矿山巷道、引水隧洞等建设项目需求不断增加,随之而来的是日趋复杂的地质结构和工程难题。数十年来,以钻爆法和tbm工法为代表的隧道掘进技术长期活跃在各种不同类型的地下空间工程施工现场,然而,在复杂多变的地质环境和高效施工需求面前,传统的破岩技术逐渐面临新的挑战。近年来,各种用于岩石快速开挖的新技术和新方法不断涌现,包括激光辐射、水射流(包括纯水射流及磨料水射流)和牙轮等。这类技术的出现为隧道开挖效率的提升创造了新的可能。然而,在硬岩、极硬岩开挖方面,一般常规技术难以实现对岩体的有效破碎,而上述新技术在破碎岩体的效率上仍旧有待提升。
3.也即,在隧道开挖中,对于硬岩和极硬岩的破碎,现有技术中通过单一的激光辐射、水射流等,无法对其进行有效破碎;
4.可见,如何提高对硬岩和极硬岩的破碎,是本领域技术人员亟需解决的技术问题。
技术实现要素:
5.本发明提供的一种基于刀具预切与弹丸侵彻的联合破岩机构,以至少解决上述技术问题;
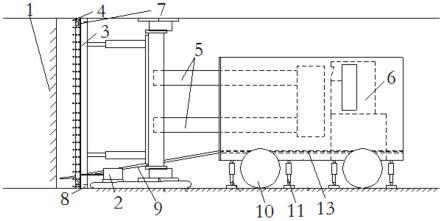
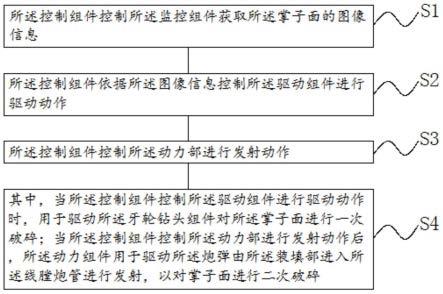
6.为了解决上述问题,本发明的第一方面提供一种基于机械切割与弹丸侵彻组合装置的联合破岩方法,所述方法用于对掌子面进行开挖,所述组合装置包括线膛炮管、以及为所述线膛炮管提供炮弹的装填部和驱动所述炮弹进行发射的动力部,牙轮钻头组件、和用于驱动所述牙轮钻头组件的驱动组件,监视组件和控制组件,所述控制组件与所述动力部、驱动组件和监视组件通信连接;所述线膛炮管和所述装填部设置在一机架上,所述联合破岩方法包括:所述控制组件控制所述监控组件获取所述掌子面的图像信息;所述控制组件依据所述图像信息控制所述驱动组件进行驱动动作;所述控制组件控制所述动力部进行发射动作;其中,当所述控制组件控制所述驱动组件进行驱动动作时,所述驱动组件用于驱动所述牙轮钻头组件对所述掌子面进行一次破碎;当所述控制组件控制所述动力部进行发射动作后,所述动力组件用于驱动所述炮弹由所述装填部进入所述线膛炮管进行发射,以对掌子面进行二次破碎。
7.在第一方面中,所述控制组件依据所述图像信息控制所述驱动组件进行驱动动作还包括:通过所述控制组件检测所述牙轮钻头组件是否与所述掌子面贴合,若是,则控制所述驱动组件进行驱动动作,若否,则调整所述牙轮钻头组件与所述掌子面的距离,使所述牙轮钻头组件与所述掌子面进行贴合后,在控制所述驱动组件进行驱动动作。
8.在第一方面中,所述组合装置还包括压力传感组件,所述压力传感组件设置在所述牙轮钻头组件上,且所述压力传感组件与所述控制组件电连接,所述通过所述控制组件检测所述牙轮钻头组件是否与所述掌子面贴合包括:通过控制组件接收所述压力传感器传输的压力值,若压力值大于等于预设的压力阈值,则判定所述牙轮钻头组件与所述掌子面相贴合,若压力值小于预设的所述压力阈值,则判定所述牙轮钻头组件未与所述掌子面贴合。
9.在第一方面中,所述组合装置还包括伸缩油缸,所述伸缩油缸的固定端设置在机架上,所述伸缩油缸的伸缩端与所述牙轮钻头组件连接,所述伸缩油缸与所述控制组件电连接,所述调整所述牙轮钻头组件与所述掌子面的距离包括:所述控制组件控制所述伸缩油缸的伸缩端进行伸缩动作,以调整所述牙轮钻头组件的位置。
10.在第一方面中,所述组合装置还包括行走组件,所述行走组件设置在所述机架底部,所述行走组件与所述控制组件电连接,所述调整所述牙轮钻头组件与所述掌子面的距离包括:所述控制组件控制所述行走组件的行走动作,以调整所述牙轮钻头组件的位置。
11.在第一方面中,所述组合装置还包括供电电源,所述供电装置与所述驱动组件、所述动力部、所述控制组件、所述压力传感组件、所述伸缩组件和所述行走组件连接并供电,所述联合破岩方法还包括:通过所述控制组件监控所述驱动组件、所述动力部、所述压力传感组件、所述伸缩组件和所述行走装置的电量,若所述驱动组件、所述动力部、所述压力传感组件、所述伸缩组件和所述行走组件中任一组件的电量低于预设的电量阈值,则判定该低于所述电量阈值的所述组件为待充电组件,并控制所述供电电源对所述组件进行充电,当该所述装置的电量大于或等于预设的所述电量阈值时,则控制所述供电电源停止对所述组件进行充电。
12.在第一方面中,所述组合装置还包括角度检测装置,所述角度检测装置设置在所述牙轮钻头组件上,所述角度检测装置还与所述控制组件电连接,所述控制组件依据所述图像信息控制所述驱动组件进行驱动动作之前,所述联合破岩方法包括:通过所述控制组件控制所述角度校测装置检测所述牙轮钻头组件与所述掌子面的角度,若所述角度在预设的角度阈值范围,则可进行所述驱动组件控制,若否,则调整所述牙轮钻头组件与所述掌子面的角度至所述角度阈值范围之内,则再进行所述驱动组件控制。
13.在第一方面中,所述组合装置还包括:在所述三牙轮钻头组件与所述驱动组件之间设置有角度调节组件,所述角度调节组件包括万向节组件以及用于驱动所述万向节组件进行角度转动的万向节驱动组件,所述万向节驱动组件与所述控制组件电连接,所述调整所述牙轮钻头组件与所述掌子面的角度至所述角度阈值范围之内包括:通过所述控制组件控制所述万向节控制组件发生预设角度的转动,以调节所述牙轮钻头组件至预设的角度阈值范围之内。
14.在第一方面中,所述组合装置还包括:安装环,所述牙轮钻头组件为多个,多个所述牙轮钻头组件布设在所述安装环上,所述安装环与所述伸缩油缸的伸缩端连接,所述控制组件依据所述图像信息控制所述驱动组件进行驱动动作之前,所述方法还包括:依据所述掌子面的所述图像信息获取所述掌子面的面积;依据所述面积设置所述安装环的体积和形状。
15.第二方面,本发明提供了一种针对硬岩、极硬岩的破岩装置,所述破岩装置应用于
上述任意一项所述的基于机械切割与弹丸侵彻组合装置的联合破岩方法构。
16.有益效果:本发明提出了一种基于机械切割与弹丸侵彻组合装置的联合破岩方法,利用控制组件控制掌子面获取掌子面的图像信息,然后在通过控制组件依据图像信息控制驱动组件驱动,以使牙轮钻头组件对掌子面进行一次破碎,最后在通过控制组件控制动力部进行发射动作,使炮弹由装填部进入线膛炮管进行发射,以对掌子面进行二次破碎,通过这种联合破岩的方式,进而达到对硬岩、极硬岩的彻底破碎。
附图说明
17.为了更清楚地说明本说明书实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1为本发明实施例一中基于机械切割与弹丸侵彻组合装置的联合破岩方法的流程示意图;
具体实施方式
19.下面将结合附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
20.同时,本说明书实施例中,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本说明书实施例中所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明目的,并不是旨在限制本发明。
21.实施例一:
22.如图1所示,本实施例一提供了基于机械切割与弹丸侵彻组合装置的联合破岩方法,方法用于对掌子面进行开挖,组合装置包括线膛炮管、以及为线膛炮管提供炮弹的装填部和驱动炮弹进行发射的动力部,牙轮钻头组件、和用于驱动牙轮钻头组件的驱动组件,监视组件和控制组件,控制组件与动力部、驱动组件和监视组件通信连接;线膛炮管和装填部设置在一机架上;联合破岩方法包括:
23.控制组件控制监控组件获取掌子面的图像信息;控制组件依据图像信息控制驱动组件进行驱动动作;控制组件控制动力部进行发射动作;其中,当控制组件控制驱动组件进行驱动动作时,用于驱动牙轮钻头组件对掌子面进行一次破碎;当控制组件控制动力部进行发射动作后,动力组件用于驱动炮弹由装填部进入线膛炮管进行发射,以对掌子面进行二次破碎。
24.具体而言,利用控制组件控制掌子面获取掌子面的图像信息,然后在通过控制组件依据图像信息控制驱动组件驱动,以使牙轮钻头组件对掌子面进行一次破碎,最后在通过控制组件控制动力部进行发射动作,使炮弹由装填部进入线膛炮管进行发射,以对掌子
面进行二次破碎,通过这种联合破岩的方式,进而达到对硬岩、极硬岩的破碎。
25.在一些可能的实施方式中,对于,控制组件依据图像信息控制驱动组件进行驱动动作步骤而言,本实施例一提出一种实施方式,该实施方式包括:通过控制组件检测牙轮钻头组件是否与掌子面贴合,若是,则控制驱动组件进行驱动动作,若否,则调整牙轮钻头组件与掌子面的距离,使牙轮钻头组件与掌子面进行贴合后,在控制驱动组件进行驱动动作;
26.这是因为通过牙轮对掌子面进行破坏,必须要是牙轮与掌子面直接接触,若没有直接接触或接触不够充分,则在施加的施工中将会做无用功或者降低破岩的效率;
27.在一可能的实施方式中,对于组合装置而言,其包括压力传感组件,压力传感组件设置在牙轮钻头组件上,且压力传感组件与控制组件电连接,基于上述组件,对于通过控制组件检测牙轮钻头组件是否与掌子面贴合步骤而言,本实施例一提出一种实施方式,该实施方式包括:通过控制组件接收压力传感器传输的压力值,若压力值大于等于预设的压力阈值,则判定牙轮钻头组件与掌子面相贴合,若压力值小于预设的压力阈值,则判定牙轮钻头组件未与掌子面贴合;
28.这样就能通过压力检测来确定牙轮钻头是否与掌子面充分接触,进而判断是否达到牙轮钻头开启的条件。
29.在一些可能的实施方式中,对于组合装置而言,其还包括伸缩油缸,伸缩油缸的固定端设置在机架上,伸缩油缸的伸缩端与牙轮钻头组件连接,伸缩油缸与控制组件电连接,基于上述装置,对于调整牙轮钻头组件与掌子面的距离的步骤而言,本实施例提出一种实施方式,该实施方式包括:控制组件控制伸缩油缸的伸缩端进行伸缩动作,以调整牙轮钻头组件的位置;
30.这样就能及时根据钻头距离掌子面的距离来实时调整。
31.在一些可能的实施方式中,组合装置还包括行走组件,行走组件设置在机架底部,行走组件与控制组件电连接,基于上述装置,对于调整牙轮钻头组件与掌子面的距离而言,本实施例一提出一种实施方式,该实施方式包括:控制组件控制行走组件的行走动作,以调整牙轮钻头组件的位置;
32.当牙轮钻头距离掌子面的距离较远时,无法通过上述实施例一中的伸缩油缸来实现牙轮钻头与掌子面的抵近接触时,即可通过该行走组件来调整牙轮钻头与掌子面的距离。
33.在一些可能的实施方式中,组合装置还包括供电电源,供电装置与驱动组件、动力部、控制组件、压力传感组件、伸缩组件和行走组件连接并供,基于此,本实施例一提出一种实施方式,该实施方式中,通过控制组件监控驱动组件、动力部、压力传感组件、伸缩组件和行走装置的电量,若驱动组件、动力部、压力传感组件、伸缩组件和行走组件中任一组件的电量低于预设的电量阈值,则判定该低于电量阈值的组件为待充电组件,并控制供电电源对组件进行充电,当该装置的电量大于或等于预设的电量阈值时,则控制供电电源停止对组件进行充电。
34.在一些可能的实施方式中,组合装置还包括角度检测装置,角度检测装置设置在牙轮钻头组件上,角度检测装置还与控制组件电连接,基于此,在控制组件依据图像信息控制驱动组件进行驱动动作步骤之前,本实施例一提出一种实施方式,该实施方式还包括:通过控制组件控制角度校测装置检测牙轮钻头组件与掌子面的角度,若角度在预设的角度阈
值范围,则可进行驱动组件控制,若否,则调整牙轮钻头组件与掌子面的角度至角度阈值范围之内,则再进行驱动组件控制;
35.通过这种方式来确定牙轮钻头与掌子面的角度,若角度出现较大偏差,也是无法进行有效的掌子面开挖的。
36.进一步地,在一些可能的实施方式中,组合装置还包括:在三牙轮钻头组件与驱动组件之间设置有角度调节组件,角度调节组件包括万向节组件以及用于驱动万向节组件进行角度转动的万向节驱动组件,万向节驱动组件与控制组件电连接,基于此,对于上述实施例一中提出的述调整牙轮钻头组件与掌子面的角度至角度阈值范围之内而言,本实施例一提出一种实施方式,该实施方式包括:通过控制组件控制万向节控制组件发生预设角度的转动,以调节牙轮钻头组件至预设的角度阈值范围之内,这样即可在牙轮钻头与掌子面的角度不匹配的条件下实时调整牙轮钻头与掌子面的角度。
37.在一些可能的实施方式中,组合装置还包括:安装环,牙轮钻头组件为多个,多个牙轮钻头组件布设在安装环上,安装环与伸缩油缸的伸缩端连接,基于上述装置,在控制组件依据图像信息控制驱动组件进行驱动动作步骤之前,本实施例一提出一种实施方式,该实施方式包括:依据掌子面的图像信息获取掌子面的面积;依据面积设置安装环的体积和形状;
38.这是因为,不同的隧道施工环境,其掌子面的尺寸也不一样,所以要根据实际的掌子面面积来确定安装环的形状和尺寸,进而达到对应匹配的目的。
39.实施例二,本发明的实施例二提供了一种针对硬岩、极硬岩的破岩装置,破岩装置应用于上述基于机械切割与弹丸侵彻组合装置的联合破岩方法,通过该方法当中的联合破岩方式,实现了对硬岩和极硬岩的高效破岩效果。
40.由于该实施例二与实施例一为同一发明构思下的一个实施例,其部分结构完全相同,因此对实施例二中与实施例一实质相同的结构不在详细阐述,未详述部分请参阅实施例一即可。
41.最后应说明的是:以上上述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围。都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
42.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。