1.本发明涉及了一种无人养殖自主作业设备,具体涉及一种珍珠龙胆石斑鱼无人养殖自主作业设备。
背景技术:
2.目前在珍珠龙胆石斑鱼的工厂化养殖投饵作业中,大多还是由人工投喂或者固定式投饵机定点定时投喂完成,饵料的投喂量依靠养殖人员长期以来的个人经验来确定的,易出现多投喂和少投喂的情况,投喂量过少,不但会违背水产养殖规律,还容易严重降珍珠龙胆石斑鱼品质;投喂量过多,不仅会导致饵料浪费,还可能到最后水体水质下降。
3.在循环水养殖中,水质监测是后续进行水质调控的前提。目前在珍珠龙胆石斑鱼的工厂化养殖水质监测作业中,大多是采用“一个高位池配一套传感器”的模式,在这种模式下,所需要的传感器数量是非常多的,而且传感器长期浸泡在水下,水质传感器的极易腐蚀,寿命会大幅度缩短。另外在循环水养殖中,水质环境相对复杂性且呈现出非线性、水质参数的分布不均匀性、传感器的不稳定性以及各个水质参数间的相互影响,给水产养殖水质的准确监控和评价带来困难。为此,基于固定位置的单点测量不符合现代化养殖对水质监测提出的要求。
技术实现要素:
4.为了解决背景技术中存在的珍珠龙胆石斑鱼的工厂化养殖投饵作业中大量存在着的饵料投放量不精准、投放位置不准确、水质监测困难等问题,本发明所提供一种珍珠龙胆石斑鱼无人养殖自主作业设备。在投喂作业方面,可以精准控制投喂量进行投喂。在水质监测作业方面,将水质传感器由水下定点连续监测改为水下多点单次采样监测。
5.本发明采用的技术方案是:
6.本发明无人养殖自主作业设备包括声诱器、主控制箱、旋转座、轮式底盘、集成投饵设备和集成水质监测设备,声诱器、主控制箱和旋转座安装在轮式底盘的顶面,旋转座水平布置,旋转座的中心旋转轴垂直连接轮式底盘的顶面;集成投饵设备和集成水质监测设备均安装在旋转座的顶面,声诱器、旋转座、集成投饵设备和集成水质监测设备均电连接主控制箱。
7.所述的主控制箱包括树莓派开发板、主控制开发板、电源、继电器模块和读卡器,电源电连接树莓派开发板、主控制开发板、继电器模块和读卡器,树莓派开发板电连接主控制开发板、集成投饵设备和集成水质监测设备,主控制开发板电连接继电器模块、读卡器、声诱器、旋转座、集成投饵设备和集成水质监测设备。读卡器具体为rfid读卡器,树莓派开发板具体为树莓派4b型开发板,主控制开发板具体为主控制stm32开发板。
8.所述的旋转座包括步进电机、步进驱动器、小同步带轮、大同步带轮、同步带和旋转底座,步进驱动器电连接主控制开发板,主控制开发板通过步进驱动器控制步进电机的中心旋转轴的转动转数,进而带动旋转座的旋转指定角度,从而改变旋转座上的集成投饵
设备和集成水质监测设备的朝向。
9.所述的集成投饵设备包括投饵控制器、料斗、下料机构、称重盘、送料机构、投料机构和投饵设备机架,投饵设备机架安装在旋转座上,投饵控制器和投料机构安装在投饵设备机架上,料斗、下料机构、送料机构和称重盘自上而下依次安装在投饵设备机架上,称重盘水平布置,投料机构安装在称重盘的一侧;投饵控制器电连接下料机构、称重盘、送料机构、投料机构和主控制箱的主控制开发板和树莓派开发板。
10.所述的下料机构包括下料孔板、下料板、两个下料门、丝杠螺母装置、红外测距传感器和下料电机,料斗的下料口朝向正下方,下料孔板水平安装在料斗的下料口处,下料孔板的底面安装有下料板,下料板的底面安装有丝杠螺母装置,丝杠螺母装置同步连接下料电机,下料电机的机身安装在投饵设备机架上,丝杠螺母装置上安装有两个下料门,其中一个下料门的底面安装有红外测距传感器;红外测距传感器和下料电机电连接投饵控制器。
11.所述的丝杠螺母装置包括两个丝杠、四个丝杠螺母和若干支座,两个丝杠分别通过各个支座水平活动安装在下料板底面的对称两侧边,两个丝杠相互平行并仅可绕自身轴线转动,不可产生移动;两个下料门均为矩形板状并水平布置在两个丝杠之间,两个下料门的其中一侧面正对平行布置,每个下料门的另外两相对的侧面分别通过螺纹套装在两个丝杠上丝杠螺母活动安装在两个丝杠上;两个丝杠的旋向相同,每个下料门连接的两个丝杠螺母的旋向相同,其中一个下料门上的两个丝杠螺母的旋向和另一个下料门上的两个丝杠螺母的旋向相反;其中一个丝杠的一端同步连接下料电机的输出轴,其中一个丝杠的另一端以及另一个丝杠的两端均活动连接在位于丝杠端部的支座上;远离下料电机的下料板的一侧边朝竖直方向向下设有反射挡板,红外测距传感器水平朝向下料板的反射挡板。
12.所述的下料孔板的尺寸与料斗的下料口的尺寸相同;下料孔板上沿竖直方向均匀间隔开设有若干下料通孔,每个下料通孔的直径大于一倍饵料的直径且小于两倍的饵料的直径;所述的下料板中部沿竖直方向开设有矩形通槽,下料孔板的各个下料通孔均位于下料板的矩形通槽的正上方并相互连通,饵料依次自料斗的下料口、下料孔板的各个下料通孔和下料板的矩形通槽后落在称重盘上。
13.主控制开发板通过投饵控制器控制下料电机带动同步连接的丝杠转动,从而带动两个下料门朝相向或相反的方向移动,从而控制两个下料门关闭或打开至最大开度,当两个下料门关闭时,料斗中的饵料被挡在下料板的矩形通槽上方;红外测距传感器用来测量自身与另一个下料门之间的距离,正常工作状态下,当距离等于最大预设距离时,两个下料门关闭,当距离等于最小预设距离时,两个下料门打开至最大开度,此时下料板的矩形通槽位于两个下料门之间的开口处;称重盘用来测量料斗中落下的饵料的质量,正常工作状态下,当称重盘中的饵料的质量等于预设质量时,两个下料门关闭;树莓派开发板根据最大预设距离、最小预设距离和饵料的预设质量计算出下料电机控制两个下料门从打开到关闭的转速、转数和转向,以保证下料机构和称重盘处于正常工作状态,称重盘和红外测距传感器将测得的数据实时传输至树莓派开发板中。
14.在下料机构下料过程中,首先在料斗中装满饵料,此时两个下料门正对的两侧面相互接触,使得饵料被挡在下料板的矩形通槽上方;主控制开发板通过投饵控制器控制下料电机带动同步连接的丝杠转动,控制两个下料门反向移动并逐渐打开至最大开度,之后两个下料门相向移动并最终关闭,过程中料斗中的饵料不断落在称重盘上,称重盘实时传
输饵料的质量至树莓派开发板,树莓派开发板根据饵料的实时质量和预设饵料质量之间的差值,实时计算并获得下料电机的转速、转数和转向并输入主控制开发板中,主控制开发板通过投饵控制器控制下料电机带动同步连接的丝杠转动,控制两个下料门打开后再关闭,当两个下料门关闭后停止下料电机的运行,称重盘上最终落入预设饵料质量的饵料。
15.在下料电机运行的过程中,当红外测距传感器实时测量到的距离等于最大预设距离和最小预设距离时,主控制开发板需通过投饵控制器控制下料电机停止或反向转动,可以防止下料机构的破坏。
16.所述的送料机构包括两个直线导轨、送料板架和电动推杆,两个直线导轨和电动推杆的机身安装在投饵设备机架上,送料板架位于称重盘的正上方,电动推杆同步连接送料板架;电动推杆电连接投饵控制器。
17.送料板架为矩形筒状,送料板架上侧和下侧贯通,送料板架的相对两外侧面分别滑动安装在两个平行并水平布置的直线导轨上,送料板架的底边与称重盘的顶面留有缝隙,缝隙的高度小于饵料的直径,送料板架的底面的尺寸等于称重盘的顶面的尺寸;送料板架的另外相对两外侧面的其中一外侧面垂直连接电动推杆的推杆的伸出端,电动推杆的推杆和两个直线导轨的轨长方向平行于饵料的水平传送方向。
18.所述的投料机构包括输送带传送机、投料滚轮、投料电机、两个挡板和若干分隔板,输送带传送机、投料滚轮、投料电机的机身、两个挡板和各个分隔板均安装在投饵设备机架上,投料电机同步连接投料滚轮;输送带传送机和投料电机电连接投饵控制器。
19.远离电动推杆的称重盘的一侧作为称重出口侧,靠近称重盘的输送带传送机的一侧作为传送入口侧,远离称重盘的输送带传送机的一侧作为传送出口侧,传送入口侧位于称重出口侧的侧下方并相互平行,传送出口侧朝向并靠近旋转座的侧边,传送出口侧和旋转座的侧边之间无遮挡物;两个挡板分别竖直布置在输送带传送机上方的相对两侧,两个挡板的长度方向与输送带传送机的传送方向平行,,两个挡板的长度等于输送带传送机的顶面长度,两个挡板的底面与输送带传送机的顶面之间留有间隙;输送带传送机的传送出口侧的正上方布置有投料滚轮,投料滚轮水平布置,投料滚轮的中心轴同步连接投料电机的输出轴,投料滚轮的旋向和输送带传送机的旋向相反;输送带传送机的传送入口侧、两个挡板和投料滚轮之间的输送带传送机顶面正上方竖直平行间隔布置有若干分隔板,各个分隔板靠近投料滚轮,各个分隔板的板面垂直于输送带传送机的传送方向,各个分隔板与正下方的输送带传送机的顶面之间均留有间隙。输送带传送机包括输送带、输送带轮和输送电机,输送电机电连接投饵控制器。
20.所述的输送带传送机的传送入口侧与称重出口侧之间的距离小于饵料的直径;两个挡板的底面与输送带传送机的顶面之间的间隙高度小于饵料的直径;投料滚轮与正下方的输送带传送机的顶面之间的距离略小于饵料的直径;所述的各个分隔板与正下方的输送带传送机的顶面之间的间隙高度自输送带传送机的传送方向依次递减,靠近投料滚轮的一个分隔板与正下方的输送带传送机的顶面之间的间隙高度大于一倍饵料的直径且小于两倍的饵料的直径。
21.当主控制开发板通过投饵控制器控制下料电机停止运行后,再通过投饵控制器控制送料机构的电动推杆、投料机构的输送带传送机和投料电机开始运行,电动推杆推动送料板架朝输送带传送机的传送入口侧移动,送料板架连接电动推杆的一侧面的内侧将称重
盘上的饵料完全推出称重盘的顶面,投饵控制器控制送料机构的电动推杆拉回送料板架至称重盘的正上方后停止运行;饵料自送料板架贯通的底部落入投料机构的输送带传送机的传送出口侧,输送带传送机带动饵料移动,两个挡板防止饵料向侧方掉落,饵料依次经过各个分隔板和输送带传送机的顶面之间的间隙后被铺平,最终到达投料滚轮和传送出口侧之间的间隙处,被转动的投料滚轮挤出输送带传送机的顶面并呈抛物线抛入养殖有珍珠龙胆石斑鱼的高位池中的珍珠龙胆石斑鱼聚集处。
22.所述的集成水质监测设备包括平台、红外反射板、红外传感器、伸缩装置、集成水质探头和水质监测控制器,平台安装在旋转座的顶面,红外反射板、伸缩装置和水质监测控制器均安装在平台上,红外传感器安装在伸缩装置上,集成水质探头通过连接绳连接伸缩装置;红外传感器和伸缩装置电连接水质监测控制器,集成水质探头电连接树莓派开发板,水质监测控制器电连接主控制开发板;所述的集成水质探头中还安装有水质控制开发板,水质控制开发板电连接树莓派开发板;水质控制开发板将集成水质探头测得的水质数据传输至树莓派开发板。
23.所述的伸缩装置的一端为伸出端,另一端为缩回端,集成水质探头位于集成水质监测设备的侧方并靠近伸缩装置的伸出端,伸缩装置的伸出端引出伸缩连接绳并连接至集成水质监测设备的顶面中心;伸缩装置的缩回端上安装有红外传感器,靠近伸缩装置的缩回端的侧方竖直布置有红外反射板,红外传感器水平垂直朝向红外反射板。
24.伸缩装置包括水质监测电机、若干伸缩臂、滑轮和连接绳,各个伸缩臂自下而上依次堆叠并水平布置,每两个相邻的伸缩臂之间滑动连接且滑动方向平行于各个伸缩臂的臂长方向,最下方的一个伸缩臂固定不动;水质监测电机安装在平台上并靠近各个伸缩臂的一端,各个伸缩臂靠近水质监测电机的一端作为缩回端,各个伸缩臂远离水质监测电机的一端作为伸出端,每个伸缩臂的相同一侧的侧面上均设有固定点,每个固定点靠近各自所在的伸缩臂的缩回端,除了最上方的一个伸缩臂,设有固定点的每个伸缩臂的侧面上还安装有滑轮,各个伸缩臂侧面的滑轮的中心轴垂直于各自所在的伸缩臂的一侧面,最上方的一个伸缩臂的顶面的两侧分边安装有两个滑轮,最上方的一个伸缩臂顶面的两个滑轮的中心轴相互平行并平行于各个伸缩臂侧面的滑轮的中心轴;一根连接绳连接至集成水质监测设备的顶面中心并向上绕过最上方的一个伸缩臂顶面的两个滑轮的上侧,后绕经水质监测电机的旋转轴,自水质监测电机的旋转轴下侧绕出后绕经最下方的伸缩臂的右侧后固定连接至上方相邻的一个伸缩臂的固定点,每三个相邻的伸缩臂中,上下的两个伸缩臂的固定点分别连接一根连接绳的两端,连接绳绕经中间的伸缩臂的滑轮的右侧;当水质监测电机正向转动时,各个伸缩臂的伸出端均伸出带动集成水质探头朝养殖有珍珠龙胆石斑鱼的高位池上方移动,连接集成水质探头的连接绳向下放出并带动集成水质探头向下移动至养殖有珍珠龙胆石斑鱼的高位池中进行监测。
25.红外传感器安装在下方的倒数第二个伸缩臂的缩回端,红外传感器和红外反射板之间没有遮挡物,红外传感器测量自身至红外反射板之间的距离并传输至水质监测控制器中从而传输至主控制开发板,主控制开发板根据红外传感器测得的距离数据控制水质监测控制器,从而通过水质监测控制器控制水质监测电机的转数、转速和转向来控制各个伸缩臂的伸缩长度,进而控制集成水质探头的下降深度。
26.伸缩装置的伸出端还安装有摄像头,即最上方的一个伸缩臂的伸出端上安装有摄
像头,摄像头电连接树莓派开发板,继电器模块通过主控制开发板控制声诱器发出声音,摄像头在声诱器发出声音使得驯化好的珍珠龙胆石斑鱼聚集后拍摄高位池中聚集的珍珠龙胆石斑鱼的图像并传输至树莓派开发板,树莓派开发板将图像处理后获得图像中的聚集的珍珠龙胆石斑鱼的数量和位置,读卡器中读取有高位池中养殖的珍珠龙胆石斑鱼的当前生长期数据传输到主控制开发板中进而传输至树莓派开发板中,树莓派开发板结合石斑鱼固定生长期所需的饵料量得到精准投喂量作为预设饵料质量,精准投喂量是由石板鱼数量和单尾石斑鱼特定生长周期所需饵料量的乘积决定的;树莓派开发板将预设饵料质量和聚集的珍珠龙胆石斑鱼的位置传输至主控制开发板中,主控制开发板控制旋转座将投料机构的输送带传送机的传送出口侧正对聚集的珍珠龙胆石斑鱼的位置,再控制投料机构进行投料,以达到提高饵料利用率的目的。
27.集成水质探头上安装有溶解氧传感器、氨氮传感器、亚硝酸盐传感器、ph传感器和压强传感器等,溶解氧传感器、氨氮传感器、亚硝酸盐传感器、ph传感器和压强传感器均电连接水质控制开发板,水质控制开发板具体为stm32开发板;当高位池需要进行水质检测时,首先通过主控制开发板控制旋转座将伸缩装置的伸出端朝向高位池,再通过伸缩装置的伸缩调整将集成水质探头伸出并下降至高位池中,可以通过集成水质探头获得高位池中不同点位的水质数据,从而实时监测高位池中的水质,便于后续进行高位池水质的调控。同时可以实现养殖过程中减少传感器数量以及延长传感器的使用寿命的目的。
28.一种珍珠龙胆石斑鱼无人养殖自主作业设备的无人养殖自主作业方法:
29.所述的无人养殖自主作业设备在进行自主投喂作业时,首先在料斗中装满饵料,此时两个下料门正对的两侧面相互接触,使得饵料被挡在下料板的矩形通槽上方;然后通过轮式底盘将无人养殖自主作业设备行驶至养殖有若干驯化后的珍珠龙胆石斑鱼的高位池附近,通过主控制开发板控制声诱器发出声音使得驯化后的珍珠龙胆石斑鱼聚集,通过主控制开发板控制旋转座旋转,使得集成投饵设备的投料机构的输送带传送机的传送出口侧朝向聚集的驯化后的珍珠龙胆石斑鱼。
30.通过树莓派开发板将自主投喂作业过程中预设的下料电机的转速、转数和转向输入主控制开发板中,主控制开发板通过投饵控制器控制下料电机带动同步连接的丝杠转动,控制两个下料门反向移动并逐渐打开至最大开度,之后两个下料门相向移动并最终关闭,过程中料斗中的饵料不断落在称重盘上,当两个下料门关闭后停止下料电机的运行,称重盘上最终落入预设饵料质量的饵料。
31.当主控制开发板通过投饵控制器控制下料电机停止运行后,再通过投饵控制器控制送料机构的电动推杆、投料机构的输送带传送机和投料电机开始运行,电动推杆推动送料板架朝输送带传送机的传送入口侧移动,送料板架连接电动推杆的一侧面的内侧将称重盘上的饵料完全推出称重盘的顶面,饵料从送料板架贯通的底部完全落入投料机构的输送带传送机的传送出口侧,投饵控制器控制送料机构的电动推杆拉回送料板架至称重盘的正上方后停止运行;输送带传送机带动饵料移动,饵料依次经过各个分隔板和输送带传送机的顶面之间的间隙后被铺平,最终到达投料滚轮和传送出口侧之间的间隙处,被转动的投料滚轮挤出输送带传送机的顶面并呈抛物线抛入养殖有珍珠龙胆石斑鱼的高位池中的珍珠龙胆石斑鱼聚集处,最终实现自主投喂作业。
32.所述的珍珠龙胆石斑鱼均为驯化后的石斑鱼,首先在鱼苗期在每次投喂前通过声
诱器发出特定声音,发出特定声音后对石斑鱼进行投喂,在后续投喂中不断重复声音诱导进食训练,直至石斑鱼能够在声诱器发出声音后自动聚集觅食,从而达到对鱼群声音驯化投喂的控制。
33.所述的无人养殖自主作业设备在进行水质监测作业时,首先通过轮式底盘将无人养殖自主作业设备行驶至养殖有若干驯化后的珍珠龙胆石斑鱼的高位池附近,通过主控制开发板控制旋转座旋转,使得伸缩装置的伸出端朝向高位池,然后通过伸缩装置将伸出端伸出使得集成水质探头移动至高位池的正上方,同时伸缩装置将伸缩连接绳伸长使得集成水质探头下降至高位池中进行水质检测;通过改变旋转座的旋转角度控制伸缩装置的伸出端的朝向,通过改变伸缩装置的伸长量和伸缩连接绳的下降量控制集成水质探头下降至高位池中的位置,从而在多次将集成水质探头下降至高位池中的不同点位处时实时检测高位池中不同点位的水质数据并传输至树莓派开发板中,便于后续进行高位池水质的调控。
34.本发明的有益效果是:
35.相较于人工投喂或者固定式投饵机定时定点投喂的方法,本发明创新性的设计了精准称量抛洒投喂机构,通过精确量化影响珍珠龙胆石斑鱼投喂量的两个重要因素,创新性的提出了基于待进食珍珠龙胆石斑鱼数量以及与生长周期相关的珍珠龙胆石斑鱼理想投喂量的投喂量决策控制器,精确得出每个高位池中最佳投喂量;以此实现养殖过程中的精准投喂,达到节约饵料用量以及防止养殖水体水质下降的目的。同时本发明相较于传统水下安装水质传感器的方法,本发明通过改变水质监测方式,提出在线监测的方法,将水质传感器如氨氮传感器、ph传感器、溶解氧等传感器集成到一起,通过伸缩机构和绳索装置控制集成水质监测设备的位置,精确得出每个高位池的不同点位的水质信息,以实现养殖过程中的水质精准把控,且有效减少传感器数量以及延长传感器的使用寿命。
附图说明
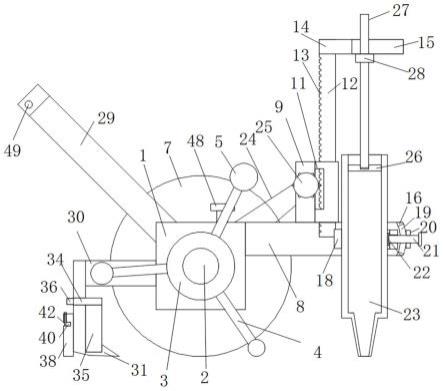
36.图1为本发明无人养殖自主作业设备的整体结构简化侧视图;
37.图2为本发明集成投饵设备的结构图;
38.图3为本发明下料机构的结构图;
39.图4为本发明送料机构的结构图;
40.图5为本发明投料机构的结构图;
41.图6为本发明集成水质监测设备的缩回状态结构图;
42.图7为本发明集成水质监测设备的伸出状态结构图;
43.图8为本发明投料机构控制过程示意图;
44.图中:1、声诱器,2、主控制箱,3、旋转座,4、轮式底盘,5、集成投饵设备,501、投饵控制器,502、料斗,503、下料机构,5031、下料孔板,5032、下料板,5033、下料门,5034、丝杠螺母装置,5035、红外测距传感器,5036、下料电机,504、称重盘,505、送料机构,5051、直线导轨,5052、送料板架,5053、电动推杆,506、投料机构,5061、输送带,5062、输送带轮,5063、输送电机,5064、投料滚轮,5065、投料电机和支座,5066、挡板,5067、分隔板,507、投饵设备机架,6、集成水质监测设备,601、水质监测电机,602、平台,603、红外反射板,604、红外传感器,605、伸缩臂,606、摄像头,607、集成水质探头,6071、溶解氧传感器,6072、氨氮传感器,6073、亚硝酸盐传感器,6074、ph传感器,6075、压强传感器,608、滑轮,609、水质监测控制
器。
具体实施方式
45.下面结合附图及具体实施例对本发明作进一步详细说明。
46.如图1所示,本发明无人养殖自主作业设备包括声诱器1、主控制箱2、旋转座3、轮式底盘4、集成投饵设备5和集成水质监测设备6,声诱器1、主控制箱2和旋转座3安装在轮式底盘4的顶面,旋转座3水平布置,旋转座3的中心旋转轴垂直连接轮式底盘4的顶面;集成投饵设备5和集成水质监测设备6均安装在旋转座3的顶面,声诱器1、旋转座3、集成投饵设备5和集成水质监测设备6均电连接主控制箱2。旋转座3包括步进电机、步进驱动器、小同步带轮、大同步带轮、同步带和旋转底座,步进驱动器电连接主控制开发板,主控制开发板通过步进驱动器控制步进电机的中心旋转轴的转动转数,进而带动旋转座3的旋转指定角度,从而改变旋转座3上的集成投饵设备5和集成水质监测设备6的朝向。
47.主控制箱2包括树莓派开发板、主控制开发板、电源、继电器模块和读卡器,电源电连接树莓派开发板、主控制开发板、继电器模块和读卡器,树莓派开发板电连接主控制开发板、集成投饵设备5和集成水质监测设备6,主控制开发板电连接继电器模块、读卡器、声诱器1、旋转座3、集成投饵设备5和集成水质监测设备6。读卡器具体为rfid读卡器,树莓派开发板具体为树莓派4b型开发板,主控制开发板具体为主控制stm32开发板。
48.如图2所示,集成投饵设备5包括投饵控制器、料斗502、下料机构503、称重盘504、送料机构505、投料机构506和投饵设备机架507,投饵设备机架507安装在旋转座3上,投饵控制器和投料机构506安装在投饵设备机架507上,料斗502、下料机构503、送料机构505和称重盘504自上而下依次安装在投饵设备机架507上,称重盘504水平布置,投料机构506安装在称重盘504的一侧;投饵控制器电连接下料机构503、称重盘504、送料机构505、投料机构506和主控制箱2的主控制开发板和树莓派开发板。
49.如图3所示,下料机构503包括下料孔板5031、下料板5032、两个下料门5033、丝杠螺母装置5034、红外测距传感器5035和下料电机5036,料斗502的下料口朝向正下方,下料孔板5031水平安装在料斗502的下料口处,下料孔板5031的底面安装有下料板5032,下料板5032的底面安装有丝杠螺母装置5034,丝杠螺母装置5034同步连接下料电机5036,下料电机5036的机身安装在投饵设备机架507上,丝杠螺母装置5034上安装有两个下料门5033,其中一个下料门5033的底面安装有红外测距传感器5035;红外测距传感器5035和下料电机5036电连接投饵控制器。
50.丝杠螺母装置5034包括两个丝杠、四个丝杠螺母和若干支座,两个丝杠分别通过各个支座水平活动安装在下料板5032底面的对称两侧边,两个丝杠相互平行并仅可绕自身轴线转动,不可产生移动;两个下料门5033均为矩形板状并水平布置在两个丝杠之间,两个下料门5033的其中一侧面正对平行布置,每个下料门5033的另外两相对的侧面分别通过螺纹套装在两个丝杠上丝杠螺母活动安装在两个丝杠上;两个丝杠的旋向相同,每个下料门5033连接的两个丝杠螺母的旋向相同,其中一个下料门5033上的两个丝杠螺母的旋向和另一个下料门5033上的两个丝杠螺母的旋向相反;其中一个丝杠的一端同步连接下料电机5036的输出轴,其中一个丝杠的另一端以及另一个丝杠的两端均活动连接在位于丝杠端部的支座上;远离下料电机5036的下料板5032的一侧边朝竖直方向向下设有反射挡板,红外
测距传感器5035水平朝向下料板5032的反射挡板。
51.下料孔板5031的尺寸与料斗502的下料口的尺寸相同;下料孔板5031上沿竖直方向均匀间隔开设有若干下料通孔,每个下料通孔的直径大于一倍饵料的直径且小于两倍的饵料的直径;所述的下料板5032中部沿竖直方向开设有矩形通槽,下料孔板5031的各个下料通孔均位于下料板5032的矩形通槽的正上方并相互连通,饵料依次自料斗502的下料口、下料孔板5031的各个下料通孔和下料板5032的矩形通槽后落在称重盘504上。
52.主控制开发板通过投饵控制器控制下料电机5036带动同步连接的丝杠转动,从而带动两个下料门5033朝相向或相反的方向移动,从而控制两个下料门5033关闭或打开至最大开度,当两个下料门5033关闭时,料斗502中的饵料被挡在下料板5032的矩形通槽上方;红外测距传感器5035用来测量自身与另一个下料门5033之间的距离,正常工作状态下,当距离等于最大预设距离时,两个下料门5033关闭,当距离等于最小预设距离时,两个下料门5033打开至最大开度,此时下料板5032的矩形通槽位于两个下料门5033之间的开口处;称重盘504用来测量料斗502中落下的饵料的质量,正常工作状态下,当称重盘504中的饵料的质量等于预设质量时,两个下料门5033关闭;树莓派开发板根据最大预设距离、最小预设距离和饵料的预设质量计算出下料电机5036控制两个下料门5033从打开到关闭的转速、转数和转向,以保证下料机构503和称重盘504处于正常工作状态,称重盘504和红外测距传感器5035将测得的数据实时传输至树莓派开发板中。
53.在下料机构503下料过程中,首先在料斗502中装满饵料,此时两个下料门5033正对的两侧面相互接触,使得饵料被挡在下料板5032的矩形通槽上方;主控制开发板通过投饵控制器控制下料电机5036带动同步连接的丝杠转动,控制两个下料门5033反向移动并逐渐打开至最大开度,之后两个下料门5033相向移动并最终关闭,过程中料斗502中的饵料不断落在称重盘504上,称重盘504实时传输饵料的质量至树莓派开发板,树莓派开发板根据饵料的实时质量和预设饵料质量之间的差值,实时计算并获得下料电机5036的转速、转数和转向并输入主控制开发板中,主控制开发板通过投饵控制器控制下料电机5036带动同步连接的丝杠转动,控制两个下料门5033打开后再关闭,当两个下料门5033关闭后停止下料电机5036的运行,称重盘504上最终落入预设饵料质量的饵料。
54.在下料电机5036运行的过程中,当红外测距传感器5035实时测量到的距离等于最大预设距离和最小预设距离时,主控制开发板需通过投饵控制器控制下料电机5036停止或反向转动,可以防止下料机构503的破坏。
55.如图4所示,送料机构505包括两个直线导轨5051、送料板架5052和电动推杆5053,两个直线导轨5051和电动推杆5053的机身安装在投饵设备机架507上,送料板架5052位于称重盘504的正上方,电动推杆5053同步连接送料板架5052;电动推杆5053电连接投饵控制器;送料板架5052为矩形筒状,送料板架5052上侧和下侧贯通,送料板架5052的相对两外侧面分别滑动安装在两个平行并水平布置的直线导轨5051上,送料板架5052的底边与称重盘504的顶面留有缝隙,缝隙的高度小于饵料的直径,送料板架5052的底面的尺寸等于称重盘504的顶面的尺寸;送料板架5052的另外相对两外侧面的其中一外侧面垂直连接电动推杆5053的推杆的伸出端,电动推杆5053的推杆和两个直线导轨5051的轨长方向平行于饵料的水平传送方向。
56.如图5所示,投料机构506包括输送带传送机、投料滚轮5064、投料电机5065、两个
挡板5066和若干分隔板5067,输送带传送机、投料滚轮5064、投料电机5065的机身、两个挡板5066和各个分隔板5067均安装在投饵设备机架507上,投料电机5065同步连接投料滚轮5064;输送带传送机和投料电机5065电连接投饵控制器。
57.远离电动推杆5053的称重盘504的一侧作为称重出口侧,靠近称重盘504的输送带传送机的一侧作为传送入口侧,远离称重盘504的输送带传送机的一侧作为传送出口侧,传送入口侧位于称重出口侧的侧下方并相互平行,传送出口侧朝向并靠近旋转座3的侧边,传送出口侧和旋转座3的侧边之间无遮挡物;两个挡板5066分别竖直布置在输送带传送机上方的相对两侧,两个挡板5066的长度方向与输送带传送机的传送方向平行,,两个挡板5066的长度等于输送带传送机的顶面长度,两个挡板5066的底面与输送带传送机的顶面之间留有间隙;输送带传送机的传送出口侧的正上方布置有投料滚轮5064,投料滚轮5064水平布置,投料滚轮5064的中心轴同步连接投料电机5065的输出轴,投料滚轮5064的旋向和输送带传送机的旋向相反;输送带传送机的传送入口侧、两个挡板5066和投料滚轮5064之间的输送带传送机顶面正上方竖直平行间隔布置有若干分隔板5067,各个分隔板5067靠近投料滚轮5064,各个分隔板5067的板面垂直于输送带传送机的传送方向,各个分隔板5067与正下方的输送带传送机的顶面之间均留有间隙。输送带传送机包括输送带5061、输送带轮5062和输送电机5063,输送电机5063电连接投饵控制器。
58.输送带传送机的传送入口侧与称重出口侧之间的距离小于饵料的直径;两个挡板5066的底面与输送带传送机的顶面之间的间隙高度小于饵料的直径;投料滚轮5064与正下方的输送带传送机的顶面之间的距离略小于饵料的直径;所述的各个分隔板5067与正下方的输送带传送机的顶面之间的间隙高度自输送带传送机的传送方向依次递减,靠近投料滚轮5064的一个分隔板5067与正下方的输送带传送机的顶面之间的间隙高度大于一倍饵料的直径且小于两倍的饵料的直径。
59.当主控制开发板通过投饵控制器控制下料电机5036停止运行后,再通过投饵控制器控制送料机构505的电动推杆5053、投料机构506的输送带传送机和投料电机5065开始运行,电动推杆5053推动送料板架5052朝输送带传送机的传送入口侧移动,送料板架5052连接电动推杆5053的一侧面的内侧将称重盘504上的饵料完全推出称重盘504的顶面,投饵控制器控制送料机构505的电动推杆5053拉回送料板架5052至称重盘504的正上方后停止运行;饵料自送料板架5052贯通的底部落入投料机构506的输送带传送机的传送出口侧,输送带传送机带动饵料移动,两个挡板5066防止饵料向侧方掉落,饵料依次经过各个分隔板5067和输送带传送机的顶面之间的间隙后被铺平,最终到达投料滚轮5064和传送出口侧之间的间隙处,被转动的投料滚轮5064挤出输送带传送机的顶面并呈抛物线抛入养殖有珍珠龙胆石斑鱼的高位池中的珍珠龙胆石斑鱼聚集处。
60.如图6和图7所示,集成水质监测设备6包括平台602、红外反射板603、红外传感器604、伸缩装置、集成水质探头607和水质监测控制器609,平台602安装在旋转座3的顶面,红外反射板603、伸缩装置和水质监测控制器609均安装在平台602上,红外传感器604安装在伸缩装置上,集成水质探头607通过连接绳连接伸缩装置;红外传感器604和伸缩装置电连接水质监测控制器609,集成水质探头607电连接树莓派开发板,水质监测控制器609电连接主控制开发板;所述的集成水质探头607中还安装有水质控制开发板,水质控制开发板电连接树莓派开发板;水质控制开发板将集成水质探头607测得的水质数据传输至树莓派开发
板。
61.伸缩装置的一端为伸出端,另一端为缩回端,集成水质探头607位于集成水质监测设备6的侧方并靠近伸缩装置的伸出端,伸缩装置的伸出端引出伸缩连接绳并连接至集成水质监测设备6的顶面中心;伸缩装置的缩回端上安装有红外传感器604,靠近伸缩装置的缩回端的侧方竖直布置有红外反射板603,红外传感器604水平垂直朝向红外反射板603。
62.伸缩装置包括水质监测电机601、若干伸缩臂605、滑轮608和连接绳,各个伸缩臂605自下而上依次堆叠并水平布置,每两个相邻的伸缩臂605之间滑动连接且滑动方向平行于各个伸缩臂605的臂长方向,最下方的一个伸缩臂605固定不动;水质监测电机601安装在平台602上并靠近各个伸缩臂605的一端,各个伸缩臂605靠近水质监测电机601的一端作为缩回端,各个伸缩臂605远离水质监测电机601的一端作为伸出端,每个伸缩臂605的相同一侧的侧面上均设有固定点,每个固定点靠近各自所在的伸缩臂605的缩回端,除了最上方的一个伸缩臂605,设有固定点的每个伸缩臂605的侧面上还安装有滑轮608,各个伸缩臂605侧面的滑轮608的中心轴垂直于各自所在的伸缩臂605的一侧面,最上方的一个伸缩臂605的顶面的两侧分边安装有两个滑轮608,最上方的一个伸缩臂605顶面的两个滑轮608的中心轴相互平行并平行于各个伸缩臂605侧面的滑轮608的中心轴;一根连接绳连接至集成水质监测设备6的顶面中心并向上绕过最上方的一个伸缩臂605顶面的两个滑轮608的上侧,后绕经水质监测电机601的旋转轴,自水质监测电机601的旋转轴下侧绕出后绕经最下方的伸缩臂605的右侧后固定连接至上方相邻的一个伸缩臂605的固定点,每三个相邻的伸缩臂605中,上下的两个伸缩臂605的固定点分别连接一根连接绳的两端,连接绳绕经中间的伸缩臂605的滑轮608的右侧;当水质监测电机601正向转动时,各个伸缩臂605的伸出端均伸出带动集成水质探头607朝养殖有珍珠龙胆石斑鱼的高位池上方移动,连接集成水质探头607的连接绳向下放出并带动集成水质探头607向下移动至养殖有珍珠龙胆石斑鱼的高位池中进行监测。
63.红外传感器604安装在下方的倒数第二个伸缩臂605的缩回端,红外传感器604和红外反射板603之间没有遮挡物,红外传感器604测量自身至红外反射板603之间的距离并传输至水质监测控制器609中从而传输至主控制开发板,主控制开发板根据红外传感器604测得的距离数据控制水质监测控制器609,从而通过水质监测控制器609控制水质监测电机601的转数、转速和转向来控制各个伸缩臂605的伸缩长度,进而控制集成水质探头607的下降深度。
64.伸缩装置的伸出端还安装有摄像头606,即最上方的一个伸缩臂605的伸出端上安装有摄像头606,摄像头606电连接树莓派开发板,继电器模块通过主控制开发板控制声诱器1发出声音,摄像头606在声诱器1发出声音使得驯化好的珍珠龙胆石斑鱼聚集后拍摄高位池中聚集的珍珠龙胆石斑鱼的图像并传输至树莓派开发板,树莓派开发板将图像处理后获得图像中的聚集的珍珠龙胆石斑鱼的数量和位置,读卡器中读取有高位池中养殖的珍珠龙胆石斑鱼的当前生长期数据传输到主控制开发板中进而传输至树莓派开发板中,树莓派开发板结合石斑鱼固定生长期所需的饵料量得到精准投喂量作为预设饵料质量,精准投喂量是由石板鱼数量和单尾石斑鱼特定生长周期所需饵料量的乘积决定的;树莓派开发板将预设饵料质量和聚集的珍珠龙胆石斑鱼的位置传输至主控制开发板中,主控制开发板控制旋转座3将投料机构506的输送带传送机的传送出口侧正对聚集的珍珠龙胆石斑鱼的位置,
再控制投料机构506进行投料,以达到提高饵料利用率的目的。
65.集成水质探头607上安装有溶解氧传感器6071、氨氮传感器6072、亚硝酸盐传感器6073、ph传感器6074和压强传感器6075等,溶解氧传感器6071、氨氮传感器6072、亚硝酸盐传感器6073、ph传感器6074和压强传感器6075均电连接水质控制开发板,水质控制开发板具体为stm32开发板;当高位池需要进行水质检测时,首先通过主控制开发板控制旋转座3将伸缩装置的伸出端朝向高位池,再通过伸缩装置的伸缩调整将集成水质探头607伸出并下降至高位池中,可以通过集成水质探头607获得高位池中不同点位的水质数据,从而实时监测高位池中的水质,便于后续进行高位池水质的调控。同时可以实现养殖过程中减少传感器数量以及延长传感器的使用寿命的目的。
66.本发明的具体实施过程如下:
67.无人养殖自主作业设备在进行自主投喂作业时,首先在料斗502中装满饵料,此时两个下料门5033正对的两侧面相互接触,使得饵料被挡在下料板5032的矩形通槽上方;然后通过轮式底盘4将无人养殖自主作业设备行驶至养殖有若干驯化后的珍珠龙胆石斑鱼的高位池附近,通过主控制开发板控制声诱器1发出声音使得驯化后的珍珠龙胆石斑鱼聚集,通过主控制开发板控制旋转座3旋转,使得集成投饵设备5的投料机构506的输送带传送机的传送出口侧朝向聚集的驯化后的珍珠龙胆石斑鱼。
68.通过树莓派开发板将自主投喂作业过程中预设的下料电机5036的转速、转数和转向输入主控制开发板中,主控制开发板通过投饵控制器控制下料电机5036带动同步连接的丝杠转动,控制两个下料门5033反向移动并逐渐打开至最大开度,之后两个下料门5033相向移动并最终关闭,过程中料斗502中的饵料不断落在称重盘504上,当两个下料门5033关闭后停止下料电机5036的运行,称重盘504上最终落入预设饵料质量的饵料;
69.当主控制开发板通过投饵控制器控制下料电机5036停止运行后,再通过投饵控制器控制送料机构505的电动推杆5053、投料机构506的输送带传送机和投料电机5065开始运行,电动推杆5053推动送料板架5052朝输送带传送机的传送入口侧移动,送料板架5052连接电动推杆5053的一侧面的内侧将称重盘504上的饵料完全推出称重盘504的顶面,饵料从送料板架5052贯通的底部完全落入投料机构506的输送带传送机的传送出口侧,投饵控制器控制送料机构505的电动推杆5053拉回送料板架5052至称重盘504的正上方后停止运行;输送带传送机带动饵料移动,饵料依次经过各个分隔板5067和输送带传送机的顶面之间的间隙后被铺平,最终到达投料滚轮5064和传送出口侧之间的间隙处,被转动的投料滚轮5064挤出输送带传送机的顶面并呈抛物线抛入养殖有珍珠龙胆石斑鱼的高位池中的珍珠龙胆石斑鱼聚集处,最终实现自主投喂作业,如图8所示。
70.珍珠龙胆石斑鱼均为驯化后的石斑鱼,首先在鱼苗期在每次投喂前通过声诱器1发出特定声音,发出特定声音后对石斑鱼进行投喂,在后续投喂中不断重复声音诱导进食训练,直至石斑鱼能够在声诱器1发出声音后自动聚集觅食,从而达到对鱼群声音驯化投喂的控制。
71.无人养殖自主作业设备在进行水质监测作业时,首先通过轮式底盘4将无人养殖自主作业设备行驶至养殖有若干驯化后的珍珠龙胆石斑鱼的高位池附近,通过主控制开发板控制旋转座3旋转,使得伸缩装置的伸出端朝向高位池,然后通过伸缩装置将伸出端伸出使得集成水质探头607移动至高位池的正上方,同时伸缩装置将伸缩连接绳伸长使得集成
水质探头607下降至高位池中进行水质检测;通过改变旋转座3的旋转角度控制伸缩装置的伸出端的朝向,通过改变伸缩装置的伸长量和伸缩连接绳的下降量控制集成水质探头607下降至高位池中的位置,从而在多次将集成水质探头607下降至高位池中的不同点位处时实时检测高位池中不同点位的水质数据并传输至树莓派开发板中,便于后续进行高位池水质的调控。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。