技术特征:
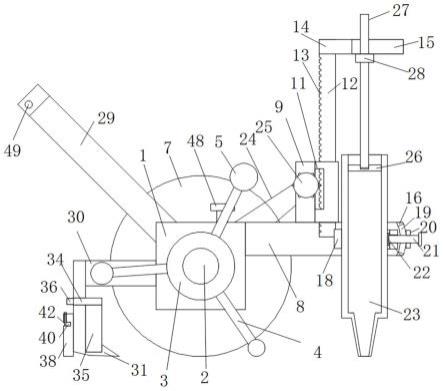
1.一种珍珠龙胆石斑鱼无人养殖自主作业设备,其特征在于:包括声诱器(1)、主控制箱(2)、旋转座(3)、轮式底盘(4)、集成投饵设备(5)和集成水质监测设备(6),声诱器(1)、主控制箱(2)和旋转座(3)安装在轮式底盘(4)的顶面,旋转座(3)水平布置,旋转座(3)的中心旋转轴垂直连接轮式底盘(4)的顶面;集成投饵设备(5)和集成水质监测设备(6)均安装在旋转座(3)的顶面,声诱器(1)、旋转座(3)、集成投饵设备(5)和集成水质监测设备(6)均电连接主控制箱(2);所述的主控制箱(2)包括树莓派开发板、主控制开发板、电源、继电器模块和读卡器,电源电连接树莓派开发板、主控制开发板、继电器模块和读卡器,树莓派开发板电连接主控制开发板、集成投饵设备(5)和集成水质监测设备(6),主控制开发板电连接继电器模块、读卡器、声诱器(1)、旋转座(3)、集成投饵设备(5)和集成水质监测设备(6)。2.根据权利要求1所述的一种珍珠龙胆石斑鱼无人养殖自主作业设备,其特征在于:所述的集成投饵设备(5)包括投饵控制器、料斗(502)、下料机构(503)、称重盘(504)、送料机构(505)、投料机构(506)和投饵设备机架(507),投饵设备机架(507)安装在旋转座(3)上,投饵控制器和投料机构(506)安装在投饵设备机架(507)上,料斗(502)、下料机构(503)、送料机构(505)和称重盘(504)自上而下依次安装在投饵设备机架(507)上,称重盘(504)水平布置,投料机构(506)安装在称重盘(504)的一侧;投饵控制器电连接下料机构(503)、称重盘(504)、送料机构(505)、投料机构(506)和主控制箱(2)的主控制开发板和树莓派开发板。3.根据权利要求2所述的一种珍珠龙胆石斑鱼无人养殖自主作业设备,其特征在于:所述的下料机构(503)包括下料孔板(5031)、下料板(5032)、两个下料门(5033)、丝杠螺母装置(5034)、红外测距传感器(5035)和下料电机(5036),料斗(502)的下料口朝向正下方,下料孔板(5031)水平安装在料斗(502)的下料口处,下料孔板(5031)的底面安装有下料板(5032),下料板(5032)的底面安装有丝杠螺母装置(5034),丝杠螺母装置(5034)同步连接下料电机(5036),下料电机(5036)的机身安装在投饵设备机架(507)上,丝杠螺母装置(5034)上安装有两个下料门(5033),其中一个下料门(5033)的底面安装有红外测距传感器(5035);红外测距传感器(5035)和下料电机(5036)电连接投饵控制器;所述的丝杠螺母装置(5034)包括两个丝杠、四个丝杠螺母和若干支座,两个丝杠分别通过各个支座水平活动安装在下料板(5032)底面的对称两侧边,两个丝杠相互平行并仅可绕自身轴线转动;两个下料门(5033)均为矩形板状并水平布置在两个丝杠之间,两个下料门(5033)的其中一侧面正对平行布置,每个下料门(5033)的另外两相对的侧面分别通过螺纹套装在两个丝杠上丝杠螺母活动安装在两个丝杠上;两个丝杠的旋向相同,每个下料门(5033)连接的两个丝杠螺母的旋向相同,其中一个下料门(5033)上的两个丝杠螺母的旋向和另一个下料门(5033)上的两个丝杠螺母的旋向相反;其中一个丝杠的一端同步连接下料电机(5036)的输出轴;远离下料电机(5036)的下料板(5032)的一侧边朝竖直方向向下设有反射挡板,红外测距传感器(5035)水平朝向下料板(5032)的反射挡板。4.根据权利要求3所述的一种珍珠龙胆石斑鱼无人养殖自主作业设备,其特征在于:所述的下料孔板(5031)的尺寸与料斗(502)的下料口的尺寸相同;下料孔板(5031)上沿竖直方向均匀间隔开设有若干下料通孔,每个下料通孔的直径大于一倍饵料的直径且小于两倍的饵料的直径;所述的下料板(5032)中部沿竖直方向开设有矩形通槽,下料孔板(5031)的各个下料通孔均位于下料板(5032)的矩形通槽的正上方并相互连通,饵料依次自料斗
(502)的下料口、下料孔板(5031)的各个下料通孔和下料板(5032)的矩形通槽后落在称重盘(504)上。5.根据权利要求2所述的一种珍珠龙胆石斑鱼无人养殖自主作业设备,其特征在于:所述的送料机构(505)包括两个直线导轨(5051)、送料板架(5052)和电动推杆(5053),两个直线导轨(5051)和电动推杆(5053)的机身安装在投饵设备机架(507)上,送料板架(5052)位于称重盘(504)的正上方,电动推杆(5053)同步连接送料板架(5052);电动推杆(5053)电连接投饵控制器;送料板架(5052)为矩形筒状,送料板架(5052)上侧和下侧贯通,送料板架(5052)的相对两外侧面分别滑动安装在两个平行并水平布置的直线导轨(5051)上,送料板架(5052)的底边与称重盘(504)的顶面留有缝隙;送料板架(5052)的另外相对两外侧面的其中一外侧面垂直连接电动推杆(5053)的推杆的伸出端,电动推杆(5053)的推杆和两个直线导轨(5051)的轨长方向平行于饵料的水平传送方向。6.根据权利要求2所述的一种珍珠龙胆石斑鱼无人养殖自主作业设备,其特征在于:所述的投料机构(506)包括输送带传送机、投料滚轮(5064)、投料电机(5065)、两个挡板(5066)和若干分隔板(5067),输送带传送机、投料滚轮(5064)、投料电机(5065)的机身、两个挡板(5066)和各个分隔板(5067)均安装在投饵设备机架(507)上,投料电机(5065)同步连接投料滚轮(5064);输送带传送机和投料电机(5065)电连接投饵控制器;远离电动推杆(5053)的称重盘(504)的一侧作为称重出口侧,靠近称重盘(504)的输送带传送机的一侧作为传送入口侧,远离称重盘(504)的输送带传送机的一侧作为传送出口侧,传送入口侧位于称重出口侧的侧下方并相互平行,传送出口侧朝向并靠近旋转座(3)的侧边;两个挡板(5066)分别竖直布置在输送带传送机上方的相对两侧,两个挡板(5066)的长度方向与输送带传送机的传送方向平行,两个挡板(5066)的底面与输送带传送机的顶面之间留有间隙;输送带传送机的传送出口侧的正上方布置有投料滚轮(5064),投料滚轮(5064)水平布置,投料滚轮(5064)的中心轴同步连接投料电机(5065)的输出轴,投料滚轮(5064)的旋向和输送带传送机的旋向相反;输送带传送机的传送入口侧、两个挡板(5066)和投料滚轮(5064)之间的输送带传送机顶面正上方竖直平行间隔布置有若干分隔板(5067),各个分隔板(5067)靠近投料滚轮(5064),各个分隔板(5067)的板面垂直于输送带传送机的传送方向,各个分隔板(5067)与正下方的输送带传送机的顶面之间均留有间隙。7.根据权利要求6所述的一种珍珠龙胆石斑鱼无人养殖自主作业设备,其特征在于:所述的输送带传送机的传送入口侧与称重出口侧之间的距离小于饵料的直径;两个挡板(5066)的底面与输送带传送机的顶面之间的间隙高度小于饵料的直径;投料滚轮(5064)与正下方的输送带传送机的顶面之间的距离小于饵料的直径;所述的各个分隔板(5067)与正下方的输送带传送机的顶面之间的间隙高度自输送带传送机的传送方向依次递减,靠近投料滚轮(5064)的一个分隔板(5067)与正下方的输送带传送机的顶面之间的间隙高度大于一倍饵料的直径且小于两倍的饵料的直径。8.根据权利要求2所述的一种珍珠龙胆石斑鱼无人养殖自主作业设备,其特征在于:所述的集成水质监测设备(6)包括平台(602)、红外反射板(603)、红外传感器(604)、伸缩装置、集成水质探头(607)和水质监测控制器(609),平台(602)安装在旋转座(3)的顶面,红外反射板(603)、伸缩装置和水质监测控制器(609)均安装在平台(602)上,红外传感器(604)
安装在伸缩装置上,集成水质探头(607)通过连接绳连接伸缩装置;红外传感器(604)和伸缩装置电连接水质监测控制器(609),集成水质探头(607)电连接树莓派开发板,水质监测控制器(609)电连接主控制开发板;所述的集成水质探头(607)中还安装有水质控制开发板,水质控制开发板电连接树莓派开发板;所述的伸缩装置的一端为伸出端,另一端为缩回端,集成水质探头(607)位于集成水质监测设备(6)的侧方并靠近伸缩装置的伸出端,伸缩装置的伸出端引出伸缩连接绳并连接至集成水质监测设备(6)的顶面中心;伸缩装置的缩回端上安装有红外传感器(604),靠近伸缩装置的缩回端的侧方竖直布置有红外反射板(603),红外传感器(604)水平垂直朝向红外反射板(603)。9.根据权利要求1-8任一所述的一种珍珠龙胆石斑鱼无人养殖自主作业设备的无人养殖自主作业方法,其特征在于:所述的无人养殖自主作业设备在进行自主投喂作业时,首先在料斗(502)中装满饵料,此时两个下料门(5033)正对的两侧面相互接触,使得饵料被挡在下料板(5032)的矩形通槽上方;然后通过轮式底盘(4)将无人养殖自主作业设备行驶至养殖有若干驯化后的珍珠龙胆石斑鱼的高位池附近,通过主控制开发板控制声诱器(1)发出声音使得驯化后的珍珠龙胆石斑鱼聚集,通过主控制开发板控制旋转座(3)旋转,使得集成投饵设备(5)的投料机构(506)的输送带传送机的传送出口侧朝向聚集的驯化后的珍珠龙胆石斑鱼;通过树莓派开发板将自主投喂作业过程中预设的下料电机(5036)的转速、转数和转向输入主控制开发板中,主控制开发板通过投饵控制器控制下料电机(5036)带动同步连接的丝杠转动,控制两个下料门(5033)反向移动并逐渐打开至最大开度,之后两个下料门(5033)相向移动并最终关闭,过程中料斗(502)中的饵料不断落在称重盘(504)上,当两个下料门(5033)关闭后停止下料电机(5036)的运行,称重盘(504)上最终落入预设饵料质量的饵料;当主控制开发板通过投饵控制器控制下料电机(5036)停止运行后,再通过投饵控制器控制送料机构(505)的电动推杆(5053)、投料机构(506)的输送带传送机和投料电机(5065)开始运行,电动推杆(5053)推动送料板架(5052)朝输送带传送机的传送入口侧移动,送料板架(5052)连接电动推杆(5053)的一侧面的内侧将称重盘(504)上的饵料完全推出称重盘(504)的顶面,饵料从送料板架(5052)贯通的底部完全落入投料机构(506)的输送带传送机的传送出口侧,投饵控制器控制送料机构(505)的电动推杆(5053)拉回送料板架(5052)至称重盘(504)的正上方后停止运行;输送带传送机带动饵料移动,饵料依次经过各个分隔板(5067)和输送带传送机的顶面之间的间隙后被铺平,最终到达投料滚轮(5064)和传送出口侧之间的间隙处,被转动的投料滚轮(5064)挤出输送带传送机的顶面并呈抛物线抛入养殖有珍珠龙胆石斑鱼的高位池中的珍珠龙胆石斑鱼聚集处,最终实现自主投喂作业。10.根据权利要求1-8任一所述的一种珍珠龙胆石斑鱼无人养殖自主作业设备的无人养殖自主作业方法,其特征在于:所述的无人养殖自主作业设备在进行水质监测作业时,首先通过轮式底盘(4)将无人养殖自主作业设备行驶至养殖有若干驯化后的珍珠龙胆石斑鱼的高位池附近,通过主控制开发板控制旋转座(3)旋转,使得伸缩装置的伸出端朝向高位池,然后通过伸缩装置将伸出端伸出使得集成水质探头(607)移动至高位池的正上方,同时伸缩装置将伸缩连接绳伸长使得集成水质探头(607)下降至高位池中进行水质检测;通过
改变旋转座(3)的旋转角度控制伸缩装置的伸出端的朝向,通过改变伸缩装置的伸长量和伸缩连接绳的下降量控制集成水质探头(607)下降至高位池中的位置,从而在多次将集成水质探头(607)下降至高位池中的不同点位处时实时检测高位池中不同点位的水质数据并传输至树莓派开发板中,便于后续进行高位池水质的调控。
技术总结
本发明公开了一种珍珠龙胆石斑鱼无人养殖自主作业设备。设备的声诱器、主控制箱和旋转座安装在轮式底盘的顶面,旋转座的中心旋转轴垂直连接轮式底盘的顶面;集成投饵设备和集成水质监测设备均安装在旋转座的顶面,声诱器、旋转座、集成投饵设备和集成水质监测设备均电连接主控制箱。本发明在投喂作业方面,可精准控制投喂量进行无人养殖自主作业,从而解决了饵料投放不精准不准确以及养殖水体水质下降的问题;在水质监测作业方面,将水质传感器水下定点连续监测改为水下断点采样监测,在减少传感器数量以及延长传感器的使用寿命的同时,还可精确得出不同点位的水质信息,以解决养殖过程中的水质精准把控困难的问题。决养殖过程中的水质精准把控困难的问题。决养殖过程中的水质精准把控困难的问题。
技术研发人员:聂鹏程 钱程 汪清平
受保护的技术使用者:浙江大学
技术研发日:2022.09.13
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。