1.本发明涉及地理信息技术领域,具体的,本发明涉及一种陆域生态保护红线标识点位双层次选取方法。
背景技术:
2.生态保护红线是指在生态空间范围内具有特殊重要生态功能、必须强制性严格保护的区域,是保障和维护国家生态安全的底线和生命线,包括陆域生态保护红线和海域生态保护红线。为促进落实生态保护红线落地并实施严格管护,必须开展陆域生态保护红线定标工作,即在重要点位设立统一规范的生态保护红线界桩和标识牌。界桩指沿生态保护红线边界按一定方式设立的地界标志桩;标识牌指以警示宣传为目的,在醒目位置设立的包含生态保护红线名称、面积、范围、功能、监管等基本信息的标识牌。界桩与标识牌的设立需要综合考虑有效性和可行性,在有限的成本控制范围内尽可能地实现对生态保护红线的有效管控。因此,必须采取有效的技术方法准确识别界桩和标识牌的最佳设立位置,确保该项工作的经济社会效益。
3.《生态保护红线勘界定标技术规程》(环办生态〔2019〕49号,以下简称《规程》)中规定“以控制边界线基本走向为原则,在重点地段、重要拐点等关键控制点埋设界桩”,“以警示宣传生态保护红线为目标,充分考虑地形、地标、地物和人口分布特征,在易到达、人类活动相对密集的区域或道路与红线的交叉点等位置醒目处埋设标识牌”。其中“重点地段”指主要路口、村庄周边及其他人为活动集中的地点;“重要拐点”指生态保护红线边界走向发生明显变化的点位。但是,《规程》中对界桩和标识牌的点位确定方法均采用定性描述,未明确具体可量化的数据处理和界桩、标识牌坐标确定规则。
4.依据该《规程》,传统的界桩、标识牌点位确定依赖人工经验,工作效率低、空间位置随意性高、准确度不高,不利于生态保护红线定标工作的大范围开展和生态保护红线的科学管护。
技术实现要素:
5.为了克服现有技术的不足,本发明提供了一种陆域生态保护红线标识点位双层次选取方法,以解决上述的技术问题。
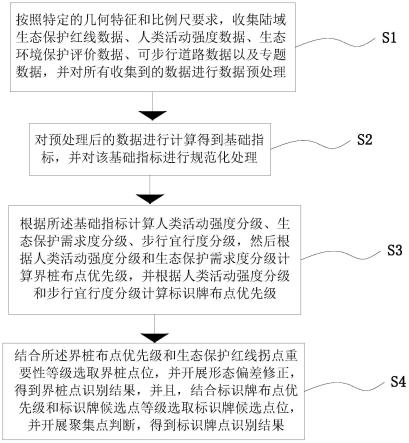
6.本发明解决其技术问题所采用的技术方法是:一种陆域生态保护红线标识点位双层次选取方法,其改进之处在于:包括以下的步骤:s1、按照特定的几何特征和比例尺要求,收集陆域生态保护红线数据、人类活动强度数据、生态环境保护评价数据、可步行道路数据以及专题数据,并对所有收集到的数据进行数据预处理;s2、对预处理后的数据进行计算得到基础指标,并对该基础指标进行规范化处理;s3、根据所述基础指标计算人类活动强度分级、生态保护需求度分级、步行宜行度分级,然后根据人类活动强度分级和生态保护需求度分级计算界桩布点优先级,并根据人类活动强度分级和步行宜行度分级计算标识牌布点优先级;s4、结合所述界桩布点优先级和生态保护红线拐点重要性等级选取界桩点位,并开展
形态偏差修正,得到界桩点识别结果,并且,结合标识牌布点优先级和标识牌候选点等级选取标识牌候选点位,并开展聚集点判断,得到标识牌点识别结果。
7.在上述方法中,所述的步骤s1中,按照特定的几何特征和比例尺要求,收集陆域生态保护红线数据、人类活动强度数据、生态环境保护评价数据、可步行道路数据以及专题数据,包括以下的步骤:
8.s11、收集待进行点位选取的陆域生态红线数据,采用通用的矢量空间数据格式,几何特征为线,比例尺不小于1:10000;
9.s12、收集人类活动强度数据,包括建筑物数据、手机用户每日日均停留人数数据和夜光遥感卫星数据;
10.s13、收集全市域范围的生态环境保护评价数据,包括生态保护红线划定工作中形成的生态功能重要性和生态环境敏感性评价结果数据,采用通用的栅格空间数据格式,空间分辨率不低于200m,比例尺不小于1:10000;
11.s14、收集全市域范围的可步行道路数据,可步行道路包括市政道路、公园路和绿道,采用通用的矢量空间数据格式,几何特征为线,比例尺不小于1:2000,所有可步行道路包含宽度属性,市政道路包含道路类型属性,道路类型属性包括高快速路、主次干路和支路;
12.s15、收集全市域范围的专题数据,包括城市建成区数据和公园出入口数据,城市建成区数据,采用通用的矢量空间数据格式,几何特征为面,比例尺不小于1:5000;
13.公园出入口数据,采用通用的矢量空间数据格式,几何特征为点,比例尺不小于1:5000。
14.在上述方法中,所述的步骤s12,包括以下的步骤:
15.s121、收集全市域范围的建筑物数据,采用通用的矢量空间数据格式,几何特征为面,比例尺不小于1:5000,包含建筑面积属性;
16.s122、收集全市域范围的手机用户每日日均停留人数数据,数据统计周期覆盖工作日和节假日,且总时长不小于7天,采用通用的栅格空间数据格式,空间分辨率不低于1km,比例尺不小于1:10000;
17.s123、收集全市域范围的最近一年内某一时点的夜光遥感卫星数据,数据采集时点为北京时间20:00-23:00,云覆盖度小于5%,采用通用的栅格空间数据格式,空间分辨率优于500m,比例尺不小于1:10000。
18.在上述方法中,所述的步骤s1中,对所有收集到的数据进行数据预处理,包括以下的步骤:
19.制作覆盖全市域的100m
×
100m评价网格;
20.将所有收集到的矢量数据统一至相同的矢量空间数据格式,将所有收集到的栅格数据统一至相同的栅格空间数据格式;
21.将所有收集到的空间数据空间参考统一至cgcs2000平面投影坐标系,采用高斯克吕格3
°
分带投影。
22.在上述方法中,所述的步骤s2,包括以下的步骤:
23.s21、分别计算每个评价网格在节假日和工作日的日均停留人数,以二者最大值作为该评价网格的日均停留人数值,生成日均停留人数指标;
24.s22、将夜光遥感影像dn值转换为绝对辐射亮度值,将辐射亮度值重采样至评价网格,生成夜间灯光强度指标;
25.s23、统计每个评价网格中的建筑面积,计算每个网格内建筑面积与格网面积的比值作为建筑容积率,生成建筑容积率指标,若建筑物跨越网格,则按照建筑物基底面积在不同格网中所占的比例对建筑面积进行分割;
26.s24、按照道路的可步行程度对道路进行分级,绿道与公园路、支路、主次干道、快速路分别赋予4、3、2、1的步行宜行度,并根据道路的实际宽度属性信息建立缓冲区,形成道路面数据,再经过矢量栅格转换,将道路面数据转换为与评价网格一致的栅格数据,栅格值为步行宜行度,生成步行宜行度指标;
27.s25、对所述的日均停留人数指标、夜间灯光强度指标和建筑容积率指标进行无量纲化处理,包括以下的处理公式
[0028][0029]ahi
、a
′
hi
分别为第i个网格的第h个指标经无量纲化处理前、后的指标值,a
hk
为第k个网格的第h个指标无量纲化处理前的指标值,b为建成区范围,n为建成区内的网格数量。
[0030]
在上述方法中,所述的步骤s3,包括以下的步骤:
[0031]
s31、以生态保护红线300m内的评价网格为对象,根据所述的日均停留人数指标、建筑容积率指标和夜间灯光强度指标计算每个评价网格的人类活动强度分级,分为1-4级;
[0032]
s32、以生态保护红线300m内的评价网格为对象,根据生态功能重要性指标和生态环境敏感性指标计算每个评价网格的生态保护需求度分级,分为1-3级;
[0033]
s33、以生态保护红线300m内的评价网格为对象,采用步行宜行度指标值作为每个评价网格的步行宜行度分级,分为1-4级;
[0034]
s34、以生态保护红线100m内的评价网格为对象,综合人类活动强度分级和生态保护需求度分级,计算每个评价网格的界桩布点优先级,设人类活动强度分级与生态保护需求度分级之和为x,则:
[0035][0036]
并且,以生态保护红线300m内的评价网格为对象,综合人类活动强度分级和步行宜行度分级,计算每个评价网格的标识牌布点优先级,设人类活动强度分级与步行宜行度分级之和为y,则:
[0037][0038]
在上述方法中,所述的步骤s31,包括以下的步骤:
[0039]
s311、选取生态保护红线300m内的评价网格,将该评价网格分别按照建筑容积率指标和夜间灯光强度指标值进行降序排列,若其中任意一项指标排名在前20%,则划分为人类活动强度4级;
[0040]
s312、将生态保护红线300m内的评价网格中的剩余部分,即没有划分为人类活动
强度4级的评价网格,依据日均停留人数指标,利用自然断点法nature breaks,划分为1-3级,得到最终的人类活动强度分级。
[0041]
在上述方法中,所述的步骤s32,包括以下的步骤:
[0042]
s321、选取生态保护红线300m内的评价网格,按照等权重的方式将生态功能重要性指标与生态环境敏感性指标进行叠加,形成生态保护需求度指标;
[0043]
s322、利用自然断点法对生态保护需求度指标进行重新分级,形成生态保护需求度分级结果1-3级,3级最高,1级最低。
[0044]
在上述方法中,所述的步骤s4中,结合所述界桩布点优先级和生态保护红线拐点重要性等级选取界桩点位,并开展形态偏差修正,得到界桩点识别结果,包括以下的步骤:
[0045]
s41、将基于评价网格的界桩布点优先级信息赋予生态保护红线,形成按界桩布点优先级分类的生态保护红线区段;
[0046]
s42、对界桩布点优先级空间连续性修正,将长度小于100m的生态保护红线区段合并至邻近区段;
[0047]
s43、使用arcgis simplify line工具的point remove算法,通过设置不同的simplification tolerance参数,得到简化程度从高到低的3个生态保护红线简化版本数据,并使用arcgis feature to point工具分别提取该3个生态红线简化版本数据的节点坐标,分别赋予3级、2级、1级的拐点重要性等级;
[0048]
s44、综合所述的拐点重要性等级和修正后的界桩布点优先级,对所述的节点进行筛选,若拐点重要性等级与界桩布点优先级之和大于等于4,则保留该节点,否则删除该节点;
[0049]
s45、形态偏差标记,按原有顺序依次连接筛选得到的节点构建折线,然后按照顺时针或逆时针的方向遍历该折线,与原始生态保护红线数据进行对比,当二者偏差超过一定阈值时,记录偏差最大的位置的坐标;
[0050]
s46、局部节点增设,在所述的偏差最大的位置增设节点,跳转至步骤s45进行偏差检测,直至所有偏差均在阈值范围内,最终得到的简化生态红线节点即为界桩点识别结果。
[0051]
在上述方法中,所述的步骤s4中,结合标识牌布点优先级和标识牌候选点等级选取标识牌候选点位,并开展聚集点判断,得到标识牌点识别结果,包括以下的步骤:
[0052]
s401、提取生态保护红线300m内的公园出入口、步行路与生态保护红线交点、以及步行路交叉口三类点位,作为标识牌候选点,分别赋予3级、2级、1级的标识牌候选点等级;
[0053]
s402、综合所述的标识牌布点优先级和标识牌候选点等级,对标识牌候选点进行筛选,若标识牌布点优先级与标识牌候选点等级之和大于等于4,则保留该候选点,否则删除该候选点;
[0054]
s403、检测所述的筛选得到的候选点之间的距离,若任意两个候选点之间的距离小于距离阈值,则对候选点进行标记;
[0055]
s404、按照标识牌候选点等级从低到高的次序依次对所述的标记的候选点进行删除,直到所有候选点之间的距离均大于距离阈值,最终剩余的候选点即为标识牌点位选取结果。
[0056]
本发明的有益效果是:综合考虑了人类活动强度、生态保护需求度、步行宜行度等因素,实现生态保护红线界桩布点优先级和标识牌布点优先级的空间定量评价,结合线简
化空间分析算法,实现了陆域生态保护红线界桩和标识牌点位的精准识别,减少了人工干预,提升点位识别效率,适用于不同点位数量限制下的布点方案求解,在成本受限的情况下最大化社会效益,为构建科学合理的生态保护红线标识系统,实现生态保护效果与标识系统建设成本的有效平衡提供科技支撑。
附图说明
[0057]
附图1为本发明的一种陆域生态保护红线标识点位双层次选取方法的流程图。附图2为得到界桩点识别结果的流程示意图。
[0058]
附图3为得到标识牌点识别结果的流程示意图。
具体实施方式
[0059]
下面结合附图和实施例对本发明进一步说明。
[0060]
以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。另外,专利中涉及到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
[0061]
界桩和标识牌点位的确定与人类活动强度高度相关,而人类活动强度可利用人类活动感知大数据快速识别,主要包括夜光遥感数据和手机信令数据。夜光遥感数据通过观测地表夜间灯光强度反映人类经济活动水平,近年来夜光遥感数据空间分辨率不断提升,我国“珞珈一号”夜光遥感卫星数据空间分辨率达130米左右,能够支撑城市内部的精细化观测。手机信令数据是手机用户在使用中产生的定位数据,适用于大范围的人类活动识别和分析,能够有效反映人类活动强度在空间上的分布情况。
[0062]
基于陆域生态保护红线标识系统点位识别面临的问题以及人类活动感知技术的发展现状,本发明专利从人类活动强度出发,同时考虑生态保护需求度、步行宜行度等因素,实现生态保护红线界桩布点优先级和标识牌布点优先级的空间定量评价,结合线简化空间分析算法,提出了一种基于多源大数据融合的陆域生态保护红线标识系统点位双层次选取方法,该方法通过引入人类活动、生态环境保护等多源大数据,采用综合评价和点位识别双层选取方法,可解决传统标识牌点位确定过度依赖人工经验、缺少客观数据支撑、定位随意性高、工作效率低的问题,实现了陆域生态保护红线界桩和标识牌点位的精准识别,减少了人工干预,提升点位识别效率,适用于不同点位数量限制下的布点方案求解,在成本受限的情况下最大化社会效益。
[0063]
参照图1所示,一种陆域生态保护红线标识点位双层次选取方法,包括以下的s1-s4步骤:
[0064]
s1、按照特定的几何特征和比例尺要求,收集陆域生态保护红线数据、人类活动强度数据、生态环境保护评价数据、可步行道路数据以及专题数据,并对所有收集到的数据进行数据预处理,数据预处理包括以下的步骤:制作覆盖全市域的100m
×
100m评价网格;将所
有收集到的矢量数据统一至相同的矢量空间数据格式,将所有收集到的栅格数据统一至相同的栅格空间数据格式;将所有收集到的空间数据空间参考统一至cgcs2000平面投影坐标系,采用高斯克吕格3
°
分带投影。通过数据预处理使所有数据实现数据格式统一和空间参考统一。
[0065]
具体的,所述的按照特定的几何特征和比例尺要求,收集陆域生态保护红线数据、人类活动强度数据、生态环境保护评价数据、可步行道路数据以及专题数据,包括以下的步骤:
[0066]
s11、收集待进行标识系统点位选取的陆域生态红线数据,采用通用的矢量空间数据格式(例如shapefile),几何特征为线,比例尺不小于1:10000,陆域生态红线数据为经过生态红线划定工作形成的,尚未进行生态保护红线勘界定标的陆域生态红线空间数据;
[0067]
s12、收集人类活动强度数据,包括建筑物数据、手机用户每日日均停留人数数据和夜光遥感卫星数据;
[0068]
具体的,所述的步骤s12,包括以下的步骤:
[0069]
s121、收集全市域范围的建筑物数据,采用通用的矢量空间数据格式(例如shapefile),几何特征为面,比例尺不小于1:5000,包含建筑面积属性;
[0070]
s122、收集全市域范围的手机用户每日日均停留人数数据,数据统计周期覆盖工作日和节假日,且总时长不小于7天,采用通用的栅格空间数据格式(例如geotiff),空间分辨率不低于1km,比例尺不小于1:10000;
[0071]
s123、收集全市域范围的最近一年内某一时点的夜光遥感卫星数据,数据采集时点为北京时间20:00-23:00,云覆盖度小于5%,采用通用的栅格空间数据格式(例如geotiff),空间分辨率优于500m,比例尺不小于1:10000;
[0072]
s13、收集全市域范围的生态环境保护评价数据,包括生态保护红线划定工作中形成的生态功能重要性和生态环境敏感性评价结果数据,采用通用的栅格空间数据格式(例如geotiff),空间分辨率不低于200m,比例尺不小于1:10000;
[0073]
s14、收集全市域范围的可步行道路数据,包括市政道路、公园路和绿道等可供人行的各类道路数据,采用通用的矢量空间数据格式(例如shapefile),几何特征为线,比例尺不小于1:2000,所有可步行道路包含宽度属性,市政道路包含道路类型属性,道路类型属性包括高快速路、主次干路(即主干路和次干路)和支路;
[0074]
s15、收集全市域范围的专题数据,包括城市建成区数据和公园出入口数据,城市建成区数据,采用通用的矢量空间数据格式(例如shapefile),几何特征为面,比例尺不小于1:5000;公园出入口数据,采用通用的矢量空间数据格式(例如shapefile),几何特征为点,比例尺不小于1:5000。
[0075]
s2、对预处理后的数据进行计算得到基础指标,并对该基础指标进行规范化处理;
[0076]
具体的,所述的步骤s2,包括以下的步骤:
[0077]
s21、分别计算每个评价网格在节假日和工作日的日均停留人数,以二者最大值作为该评价网格的日均停留人数值,生成日均停留人数指标;
[0078]
s22、将夜光遥感影像dn值转换为绝对辐射亮度值,将辐射亮度值重采样至评价网格,生成夜间灯光强度指标;
[0079]
s23、统计每个评价网格中的建筑面积,计算每个网格内建筑面积与格网面积的比
值作为建筑容积率,生成建筑容积率指标,若建筑物跨越网格,则按照建筑物基底面积在不同格网中所占的比例对建筑面积进行分割;
[0080]
s24、按照道路的可步行程度对道路进行分级,绿道与公园路、支路、主次干道、快速路分别赋予4、3、2、1的步行宜行度,并根据道路的实际宽度属性信息建立缓冲区,形成道路面数据,再经过矢量栅格转换,将道路面数据转换为与评价网格一致的栅格数据,栅格值为步行宜行度,生成步行宜行度指标;
[0081]
s25、对所述的日均停留人数指标、夜间灯光强度指标和建筑容积率指标进行无量纲化处理,去除不同量纲带来的影响,无量纲化处理通过以下的公式实现
[0082][0083]ahi
、a
′
hi
分别为第i个网格的第h个指标经无量纲化处理前、后的指标值,a
hk
为第k个网格的第h个指标无量纲化处理前的指标值,b为建成区范围,n为建成区内的网格数量。
[0084]
s3、根据所述基础指标计算人类活动强度分级、生态保护需求度分级、步行宜行度分级,然后根据人类活动强度分级和生态保护需求度分级计算界桩布点优先级,并根据人类活动强度分级和步行宜行度分级计算标识牌布点优先级;
[0085]
具体的,所述的步骤s3,包括以下的步骤:
[0086]
s31、以生态保护红线300m内的评价网格为对象,根据所述的日均停留人数指标、建筑容积率指标和夜间灯光强度指标计算每个评价网格的人类活动强度分级,分为1-4级;
[0087]
具体的,所述的步骤s31,包括以下的步骤:
[0088]
s311、选取生态保护红线300m内的评价网格,将该评价网格分别按照建筑容积率指标和夜间灯光强度指标值进行降序排列,若其中任意一项指标排名在前20%,则划分为人类活动强度4级;
[0089]
s312、将生态保护红线300m内的评价网格中的剩余部分,即没有划分为人类活动强度4级的评价网格,依据日均停留人数指标,利用自然断点法nature breaks,划分为1-3级,得到最终的人类活动强度分级;
[0090]
s32、以生态保护红线300m内的评价网格为对象,根据生态功能重要性指标和生态环境敏感性指标计算每个评价网格的生态保护需求度分级,分为1-3级;
[0091]
具体的,所述的步骤s32,包括以下的步骤:
[0092]
s321、选取生态保护红线300m内的评价网格,按照等权重的方式将生态功能重要性指标与生态环境敏感性指标进行叠加,形成生态保护需求度指标;
[0093]
s322、利用自然断点法对生态保护需求度指标进行重新分级,形成生态保护需求度分级,该分级结果包括1-3级,3级最高,1级最低;
[0094]
s33、以生态保护红线300m内的评价网格为对象,采用步行宜行度指标值作为每个评价网格的步行宜行度分级,分为1-4级;
[0095]
s34、以生态保护红线100m内的评价网格为对象,综合人类活动强度分级和生态保护需求度分级,计算每个评价网格的界桩布点优先级,设人类活动强度分级与生态保护需求度分级之和为x,则:
[0096][0097]
并且,以生态保护红线300m内的评价网格为对象,综合人类活动强度分级和步行宜行度分级,计算每个评价网格的标识牌布点优先级,设人类活动强度分级与步行宜行度分级之和为y,则:
[0098][0099]
s4、结合所述界桩布点优先级和生态保护红线拐点重要性等级选取界桩点位,并开展形态偏差修正,得到界桩点识别结果,并且,结合标识牌布点优先级和标识牌候选点等级选取标识牌候选点位,并开展聚集点判断,得到标识牌点识别结果;
[0100]
具体的,参照图2所示,所述的结合所述界桩布点优先级和生态保护红线拐点重要性等级选取界桩点位,并开展形态偏差修正,得到界桩点识别结果,包括以下的步骤:
[0101]
s41、使用空间叠置分析方法,将基于评价网格的界桩布点优先级信息赋予生态保护红线,形成按界桩布点优先级分类的生态保护红线区段;
[0102]
s42、对界桩布点优先级空间连续性修正,将长度小于100m的生态保护红线区段合并至邻近区段;
[0103]
s43、使用arcgis simplify line工具(即arcgis软件的线简化工具)的point remove算法(即节点去除算法),通过设置不同的simplification tolerance(即简化容差)参数(推荐参数为500m、200m、50m),得到简化程度从高到低的3个生态保护红线简化版本数据,并使用arcgis feature to point(即arcgis要素转点)工具分别提取该3个生态红线简化版本数据的节点坐标,分别赋予3级、2级、1级的拐点重要性等级,即为生态保护红线拐点重要性等级;
[0104]
s44、综合所述的步骤s43中的拐点重要性等级和步骤s42中修正后的界桩布点优先级,对所述的步骤s43中的节点进行筛选,若拐点重要性等级与界桩布点优先级之和大于等于4,则保留该节点,否则删除该节点;
[0105]
s45、形态偏差标记,按原有顺序依次连接所述的步骤s44中筛选得到的节点构建折线,然后按照顺时针或逆时针的方向遍历该折线,与原始生态保护红线数据进行对比,当二者偏差超过一定阈值(推荐取200m)时,记录偏差最大的位置的坐标;
[0106]
s46、局部节点增设,在所述的步骤s45中偏差最大的位置增设节点,跳转至步骤s45,再次进行偏差检测,直至所有偏差均在阈值范围内,最终得到的简化生态红线节点即为界桩点识别结果。
[0107]
进一步的,参照图3所示,所述的结合标识牌布点优先级和标识牌候选点等级选取标识牌候选点位,并开展聚集点判断,得到标识牌点识别结果,包括以下的步骤:
[0108]
s401、提取生态保护红线300m内的公园出入口、步行路与生态保护红线交点以及步行路交叉口三类类点位,作为标识牌候选点,分别赋予3级、2级、1级的标识牌候选点等级;
[0109]
s402、综合所述的标识牌布点优先级和标识牌候选点等级,对标识牌候选点进行
筛选,若标识牌布点优先级与标识牌候选点等级之和大于等于4,则保留该候选点,否则删除该候选点;
[0110]
s403、检测所述的步骤s402中筛选得到的候选点之间的距离,若任意两个候选点之间的距离小于距离阈值(推荐取50m),则对候选点进行标记;
[0111]
s404、按照标识牌候选点等级从低到高的次序依次对所述的标记的候选点进行删除,直到所有候选点之间的距离均大于距离阈值,最终剩余的候选点即为标识牌点位选取结果。
[0112]
本发明专利综合考虑了人类活动强度、生态保护需求度、步行宜行度等因素,实现生态保护红线界桩布点优先级和标识牌布点优先级的空间定量评价,结合线简化空间分析算法,实现了陆域生态保护红线界桩和标识牌点位的精准识别,减少了人工干预,提升点位识别效率,适用于不同点位数量限制下的布点方案求解,在成本受限的情况下最大化社会效益,为构建科学合理的生态保护红线标识系统,实现生态保护效果与标识系统建设成本的有效平衡提供科技支撑。
[0113]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。