1.本发明属于安全监控技术领域,尤其属于构筑物变形监控技术领域,具体涉及一种龙门吊轨道变形智能监测方法。
背景技术:
2.龙门吊是一种门式起重设备,主要用户室外的料场、建造场等的起重、装卸作业。在结构上由门架、大车运行机构、起重小车和电气部分等组成。在场地铺设两条并行轨道,门架主梁两侧安装两条支腿,通过支腿铸造车轮可以在轨道上前后运动。龙门吊场地利用率高、作业范围大、适应面广、通用性强等特点,在实际中得到广泛使用。
3.龙门吊轨道安装固定一般采用压板固定法,由混凝土基础、“工”形钢轨、鱼尾压板和螺栓、加轨器等组建起来。龙门吊吨位型号不同,轨道设计建设要求也随之不同。
4.在龙门吊的实际使用过程中,受地质灾害,如地面沉降、地裂缝、地下水动态影响;受物理外力,如龙门吊工作时产生的外力影响;和受强降雨等因素的影响;均会引起轨道基础移动,引发整个轨道变形,导致龙门吊倾斜、脱轨等安全事故发生。
5.现有监控方法包括即时巡检肉眼观察和通过手持机监测。
6.肉眼观察:在龙门吊工作过程中,肉眼观察支腿铸造车轮是否行走在轨道钢轨中间,以及龙门吊是否有横向纵向倾斜。该方法不精确,肉眼观察范围有限,特别是龙门吊倾斜问题,不能及时准确发现,避免事故发生。
7.手持机监测:不定期的采用手持移动监测仪器,以轨道基准点为准,测量轨道移动点定位数据,对比施工设计数据,得出轨道变形数据。该方法同样无时效性,不能实时监测轨道变形数据,地址灾害、物理外力的发生,无时空规律、无明显地表及外观特征。另外手持机精度指标不够,一般在1-5cm范围。
技术实现要素:
8.本发明根据现有技术的需要公开了一种龙门吊轨道变形智能监测方法。本发明目的是提供一种即时、准确、分别、安全的监控方法实现对龙门吊轨道变形数据的监测,对超过阈值的轨道变形事件,进行实时预警,及时处理,杜绝安全事故的放生。
9.本发明通过以下技术方案实现:
10.一种龙门吊轨道变形智能监测方法,其特征在于:包括监测装置设置和监测数据收集与处理;
11.监测装置设置:
12.1)在龙门吊轨道上间隔设置多个控制点,各控制点设置于两段轨道混凝土之间的伸缩缝处,各控制点均安装高精密自动安平水准仪和高精度gnss接收终端两个传感器,并与监测设备中控连接;
13.2)在龙门吊轨道附近稳定且无空间遮挡处设置gnss基准站及监测设备中控装置;
14.3)在龙门吊轨道外侧固定位置设备声光报警器,并与监测设备中控连接;
15.进一步,gnss基准站由gnss接收终端、高精度rtk芯片、工业网关主板、上网模块、物联网卡、电源芯片、电源、及外壳组成;其中,工业网关主板、上网模块、物联网卡、电源芯片、及外壳组成gnss基准站中控。
16.监测数据收集与处理:
17.4)监测数据收集包括基准点、控制点和观察点数据获得;
18.4.1)基准点由原始设计数据获得或现场测量获得,现场测量获得包括在轨道附近固定位置设置地面标记,用全站仪测量出基准点的地理位置数据,包括经度、纬度、高程、方位角;
19.4.2)控制点由步骤1)设置的控制点,通过全站仪或gps接收机测量出每个控制点的地理位置数据,包括经度、纬度、高程、方位角;
20.4.3)观察点由步骤1)设置的控制点设置的高精密自动安平水准仪和高精度gnss接收终端两个传感器收集即时位置数据,包括经度、纬度、高程、方位角;
21.5)监测数据处理包括控制点预警数据设置、观察点即时数据形变计算和预警预报处理;
22.5.1)控制点预警数据设置是根据获得的基准点和控制点原始地理位置数据计算各控制点基础数据;
23.5.2)观察点即时数据形变计算是获得各观察点即时地理位置数据并与各控制点基础数据计算比较获得轨道即时时空维度三个方向上的移动变化数据;
24.5.3)预警预报处理是定义三维形变业务预警数据范围,根据即时时空维度三个方向上的移动变化数据进行预警或预报。
25.进一步基准点、控制点和观察点数据获得包括:
26.基准点用全站仪测量出基准点的地理位置数据,包括经度、纬度、高程、方位角,记为:datum{lon、lat、dem、azi};
27.控制点用全站仪、或gps接收机测量出每个控制点的地理位置数据,其中dem以基准点做为已知点,用手持水准仪测量,精度更高,控制点结构记为:
[0028][0029]
表示n个控制点,持久化为n
×
1矩阵;
[0030]
基准点、控制点的测量均已wgs84为地理坐标系,大地北向为平面0
°
方位角;
[0031]
每个控制点对应一个观察点,地理位置对应,n个控制点既有n个观察点,记为:
[0032][0033]
在监测设备运行后,观察点的测量也以wgs84为地理坐标系,大地北向为平面0
°
方
位角;
[0034]
完成后把两组数据灌入云端系统;其中:lon表示经度;lat表示维度;dem表示高程;azi表示方位角。
[0035]
进一步控制点预警数据设置包括:定义三维形变业务预警数据,记为:
[0036]
threshold{xchange(min、max)、ychange(min、max)、zchange(min、max)}
[0037]
横向/纵向/垂直方向形变的预警范围,min表示反方向的变化、max表示正方向的变化;并远程配置各终端传感器心跳0.5s。
[0038]
进一步观察点即时数据形变计算包括:
[0039]
获得三维形变数据,轨道在时空维度三个方向上的移动变化数据,数据结构记为:3dchange{xchane、ychange、zchange},单位mm,其中:
[0040]
xchane:平面横向形变;ychange:平面纵向形变;zchange:垂直方向形变;xchane、ychange用gnss接收机监测,zchange用水准仪监测;
[0041]
计算垂直方向形变,假设时刻t,观察点n,水准仪采集的高程数据为dem
nt
,对比对应控制点的高程数据demn计算出t时刻的垂直方向轨道形变数据,记为:zchange
t
=dem
nt-demn,单位mm。
[0042]
若zchange
t
>0表示轨道垂直向下移动;若zchange
t
<0表示轨道垂直向上移动;
[0043]
计算平面方向形变,gnss接收机采集输出的数据记为:observe
nt
{lon、lat、dem、azi},因垂直方向形变通过水准仪监测,故gnss接收机输出的高程数据可以忽略不计;
[0044]
对比对应的控制点controln{lon、lat、dem、azi}数据,先把observe
nt
和controln经纬度转换为投影坐标系,通过数学三角函数,计算出observe
nt
相对controln在横向、纵向的变化数据,得到xchane
nt
、ychange
nt
。
[0045]
进一步预警预报处理包括:将得到的3dchange
nt
{xchane、ychange、zchange}进行判断,时空维度三个方向上的移动变化数据符合{xchange(min、max)、ychange(min、max)、zchange(min、max)判断条件,则在正常形变范围内,若条件不成立,表示轨道形变超出可控范围,则通过监测设备中控给声光报警器发送报警信号。
[0046]
本发明方法在两段轨道混凝土中间的伸缩缝处,预置精密水准仪、gnss接收机两个传感器,通过有线连接到监测设备,在龙门吊上设置声光报警器,通过有线和监测设备连接,另外在场地附近稳定且无空间遮挡处设置gnss基准站,用于校准gnss接收机定位。监测设备根据传感器采集的原始数据,进行边缘计算和存储,计算出轨道三维形变数据;同时结合从云端下发的业务规则数据,进行事件裁决,对于超出阈值的变形数据,发送信号给声光报警器,进行现场告警;通过监控设备的上网模块和物联网卡,把全量数据推送到云端系统,进行数据可视化、业务挖掘、消息提醒、做好项目数据台账报表。
[0047]
本发明方法具有以下优点:
[0048]
精确:水准仪采用ds03高精密自动安平水准仪,精度可达到1mm,主要负责地质沉降监测,即轨道三维形变的垂直方向监测。gnss接收机精度可达到3mm,主要负责地质平面位移监测。
[0049]
时效:结合试验测试结果、监测设备计算芯片数据处理能力,设置传感器心跳0.5s,即0.5s采集、计算、响应一次监测数据。
[0050]
稳定:系统由终端传感器、监测设备中控、声光报警器、gnss基准站等组成终端监
测设备,设计、组网清晰简介,监测设备带存储能力、断点续传能力,偶尔的断网不影响终端的正常使用。
[0051]
扩展:本设计易扩展,如考虑到地下水位、地质深部变形、轨道混凝土基础倾斜等地质影响,可增加水位计、沉降仪、测倾仪,监测设备已预留数据端口;嵌入式和云端系统设计也充分考虑了系统的快速扩展能力。
[0052]
本发明方法提出通过精密水准仪、单频gnss接收机设计的物联网设备,实时监测龙门吊轨道变形数据,对超过阈值的轨道变形事件,进行实时预警,及时处理,杜绝安全事故的发生。
[0053]
本发明方法能够实现远程可视化轨道实时形变数据、曲线走势,对于突然的单点形变、持续性形变,可以采取提前介入,加固轨道基础等措施,防患于未然;对于突发得轨道形变事件,能够最及时的发出预警信号,杜绝安全事件发生;本发明方法对轨道设计、施工数据、变形监测数据,形成项目台账数据,通过轨道形变数据挖掘分析,反过来不断指导和优化轨道的设计方案、施工工艺。
附图说明
[0054]
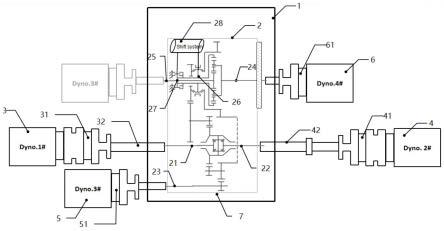
图1监测设备组网设计图;
[0055]
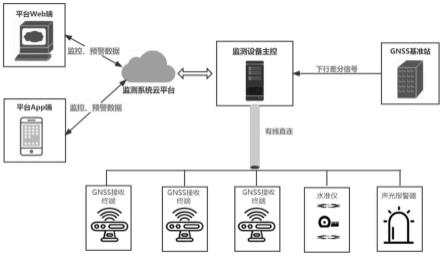
图2监测设备系统设计图。
具体实施方式
[0056]
下面结合具体实施方式对本发明进一步说明,具体实施方式是对本发明原理的进一步说明,不以任何方式限制本发明,与本发明相同或类似技术均没有超出本发明保护的范围。
[0057]
结合附图。
[0058]
下面对本发明龙门吊轨道变形智能监测方法进行详细描述说明。
[0059]
一、采集轨道设计施工数据
[0060]
本方法方法涉及轨道的基准点、控制点两组数据,如不能由原始设计数据获得,在施工阶段需要测定出两组数据。
[0061]
基准点设置在轨道附近固定位置,并作地面标记。用全站仪测量出基准点的地理位置数据,包括经度、纬度、高程、方位角,记为:datum{lon、lat、dem、azi},
[0062]
控制点设置在两段轨道混凝土中间的伸缩缝处,偏轨道垂直距离30公分处打立柱混凝土基础并露出地面20公分,作为一控制点并标记,整条轨道均匀设置多个控制点,两个控制点间隔60-100m。用全站仪、或gps接收机测量出每个控制点的地理位置数据,其中dem以基准点做为已知点,用手持水准仪测量,精度更高,控制点结构记为:
[0063]
表示n个控制点,持久化为n
×
1矩阵。
[0064]
基准点、控制点的测量均已wgs84为地理坐标系,大地北向为平面0
°
方位角,完成
后把两组数据灌入云端系统。其中:
[0065]
lon表示经度;lat表示维度;dem表示高程;azi表示方位角。
[0066]
二、设置监测设备终端传感器
[0067]
在方法一中所述每个控制点处,安装ds03高精密自动安平水准仪、和高精度gnss接收终端两个传感器,并通过有线连接到监测设备中控。水准仪以基准点为已知点,方向角度调整好,然后固定住。
[0068]
每个终端传感器安装点称为观察点,即每个控制点有一个对应的观察点,且地理位置在轨道施工阶段重合,n个控制点既有n个观察点,记为:
[0069]
在监测设备运行后,观察点的测量也以wgs84为地理坐标系,大地北向为平面0
°
方位角。
[0070]
三、设置gnss基准站
[0071]
gnss基准站由gnss接收终端、高精度rtk芯片、工业网关主板、上网模块、物联网卡、电源芯片、电源、及外壳组成。
[0072]
gnss接收终端架设在场地附近稳定且无空间遮挡处,一般可架设在厂房、办公室屋顶处。工业网关主板、上网模块、物联网卡、电源芯片、及外壳组成gnss基准站中控,设置在室内,电源一端接220家用电,一端接gnss基准站中控。
[0073]
gnss基准站通过接收终端和rtk芯片,计算出定位差分数据rtcm3,并通过工业网关主板和上网模块,把rtcm3数据传输给监测设备中控,由中控下发rtcm3数据到各观察点gnss接收机对应的rtk芯片,来校准观察点gnss定位数据,逻辑流程如图2所示。
[0074]
四、设置声光报警器
[0075]
在轨道外侧固定位置设备声光报警器,通过有线和监测设备连接。
[0076]
五、设置监测设备中控
[0077]
监测设备由多块高精度rtk芯片、工业网关主板、上网模块ec20、计算芯片cm4、物联网卡、电源芯片、及外壳组成。设置在轨道附近有电防水固定的位置,电源一端接220家用电,一端接监测设备中控。
[0078]
监测设备中控最多可接3块rtk芯片,即一个监测设备中控最多可接3个观察点终端传感器设备。如果观察点多于3个时,可配置多个监测设备中控。
[0079]
六、设计监测指标
[0080]
龙门吊轨道变形监测核心是监测设置的每个观察点对比对应的控制点数据,而计算出每个观察点的实时三维形变数据。
[0081]
三维形变数据是指轨道在时空维度三个方向上的移动变化数据,数据结构记为:3dchange{xchane、ychange、zchange},单位mm,其中:
[0082]
xchane:平面横向形变;
[0083]
ychange:平面纵向形变;
[0084]
zchange:垂直方向形变;
[0085]
xchane、ychange用gnss接收机监测,zchange用水准仪监测。
[0086]
6.1、下发监测和业务配置数据
[0087]
定义三维形变业务预警数据,记为:
[0088]
threshold{xchange(min、max)、ychange(min、max)、zchange(min、max)}
[0089]
横向/纵向/垂直方向形变的预警范围,min表示反方向的变化、max表示正方向的变化。
[0090]
业务预警数据在云端配置好后,通过无线网络下发到监测设备主控;同时把灌入的控制点数据control下发到监测设备主控。
[0091]
监测设备通电运行后,远程配置好各终端传感器心跳0.5s。
[0092]
七、边缘计算监测指标
[0093]
假设时刻t,观察点n为例说明:
[0094]
7.1、计算垂直方向形变
[0095]
假设时刻t,观察点n,水准仪采集的高程数据为dem
nt
,对比对应控制点的高程数据demn计算出t时刻的垂直方向轨道形变数据,记为:
[0096]
zchange
t
=dem
nt-demn,单位mm。
[0097]
若zchange
t
>0表示轨道垂直向下移动;若zchange
t
<0表示轨道垂直向上移动。
[0098]
7.2、计算平面方向形变
[0099]
gnss接收机采集输出的数据记为:observe
nt
{lon、lat、dem、azi},因垂直方向形变通过水准仪监测,故gnss接收机输出的高程数据可以忽略不计。
[0100]
对比对应的控制点controln{lon、lat、dem、azi}数据,先把observe
nt
和controln经纬度转换为投影坐标系,通过数学三角函数,计算出observe
nt
相对controln在横向、纵向的变化数据,得到xchane
nt
、ychange
nt
。
[0101]
通过7.1、7.2的计算,可以得到3dchange
nt
{xchane、ychange、zchange}。其他控制点任一时刻监测数据计算,以此类推。
[0102]
八、预警事件裁决处理
[0103]
同样以时刻t、观察点n、xchane为例说明:
[0104]
通过方法七得到3dchange
nt
{xchane、ychange、zchange},判断条件:
[0105]
xchane
min
<xchane
nt
<xchane
max
,则在正常形变范围内,若条件不成立,表示轨道形变超出可控范围,则通过监测设备中控给声光报警器发送报警信号。
[0106]
ychange、zchange判断逻辑以此类推。
[0107]
九、数据上云持久化
[0108]
通过方法七、方法八的计算,监测设备中控把原始采集数据、计算结果、预警数据全量上传云服务器,云端系统进行数据存储,预警数据以短信、app应用消息形式发送给相关干系人,同时在web端进行统计分析、业务挖掘和数据呈现。
[0109]
十、监控设备系统设计
[0110]
10.1、工业网关主板:选用工业iot网关树莓派主板,嵌入32位处理器、2g内存、3路rs485口、2路rs232口、2路lan口(输入输出)、2路com串口,dc 9~36v宽电源输入。
[0111]
10.2、电源芯片:选用工业车载电源,5~34v宽电压输入;输出2~28v之间任意调节,3路输入输出;输出电流12a,最大14a;工作频率250khz,自带散热、短路保护能力,给主
板12v输出供电(两根线红正黑负)。
[0112]
10.3、定位芯片:三星七频(gps glonass bds galileo qzss联合定位)高精度厘米级定位,5v dc、3a电流输入,支持移动站或本地基站;ttl电平或者rs-232电平可选,从主板获取5v电源输入,com串口和主板连接,防水等级ip67,工作温度-40
°
~80
°
。
[0113]
10.4、gnss接收终端:系统采用四星多频卫星导航天线,增益gain:《5.5;天线轴比:≤3.0;相对中心误差:
±
2;右旋圆极化方式;3~18v输入,工作电流≤45ma,从定位芯片获取5v输入,通过sma头连接
[0114]
10.5、上网模块:选用工业拨号模块ec20,插在主板上,com串口通信,从主板获取5v电压(主板自带升降压能力)输入。拨号模块自带抽屉式sim卡槽,选用移动物联网年卡,5g/月流量套餐。
[0115]
10.6、拨号天线:系统选用3g/4g/gsm/gprs 800/1800mhz强磁吸盘大功率车载全频天线,阻抗50欧姆,增益35dbi,驻波比≤1.8。拨号天线通过拨号模块给其供电,通过sma头连接。
[0116]
10.7、水准仪:采用ds03高精密自动安平水准仪,精度1mm,32放大倍率,120m工作范围,最短视距0.3m,1p54防水等级。5~24宽电压输入,rs232通信协议和主控连接。
[0117]
10.8、声光报警器:选用工业智能声光报警器,9~24v宽电压输入,自带数据解析模块(二进制数据转义为语音播报),rs232数据通讯协议。采用四芯线链接监控设备和语音喇叭,两根电源线(两根线红正黑负),从电源模块出,两根数据线从主板rs232口出。
[0118]
采用node-red技术,可视化开发嵌入式代码,通过串口工具把代码烧网关入主板,再进行组装测试、安装实施。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。