1.本发明涉及校验设备技术领域,尤其涉及一种气动式深度卡尺自动校验装置。
背景技术:
2.现有对深度卡尺的校验通常为人工手动搬运深度卡尺量块实施对深度卡尺的校验,其存在工作效率低、易损伤检测平台等缺陷。
技术实现要素:
3.本发明所要解决的技术问题在于,提供一种气动式深度卡尺自动校验装置,可同步夹持或释放多组量块,自动测量深度卡尺内端和外端的示值误差;结构布局紧凑合理,提升检测效率。
4.为了解决上述技术问题,本发明提供了一种气动式深度卡尺自动校验装置,用于自动测量深度卡尺内端和外端的示值误差,包括:箱体,箱体包括控制箱、设备箱以及装设在设备箱内部的由控制箱进行操控的传动系统;传动系统包括:底板、压板、用以联动压板相对于底板进行往复移动的y轴运动组件以及分别装配在底板上的x轴运动组件和夹持组件,夹持组件装配在x轴运动组件上;夹持组件包括:夹爪、开设在夹爪顶部的装配槽、装设在装配槽中的第一充气式密封件、第一电动气泵以及与第一电动气泵相连的第一集成电磁阀,其中:设备箱的顶面上设有多个插口,量块由插口插置于设备箱的内部,并由夹持组件夹持,控制启动第一电动气泵和第一集成电磁阀的相应端口,第一充气式密封件充气膨胀对放置在装配槽中的多组量块进行夹紧。
5.其中,控制第一集成电磁阀的相应端口关闭,第一充气式密封件恢复原状态,夹爪松开量块
6.其中,夹爪设为结构对称布置的三组,三组夹爪对放置其中的量块同步夹持或同步释放。
7.其中,y轴运动组件包括:第二电动气泵、与第二电动气泵相连的第二集成电磁阀以及与第二集成电磁阀相连的第二充气式密封件,第二充气式密封件装设在底板和压板之间,其中:控制启动第二电动气泵和第二集成电磁阀的相应端口,第二充气式密封件充气膨胀,调整改变压板与底板之间的相对位置。
8.其中,y轴运动组件设为结构对称布置的两套,分别装配在气动式深度卡尺自动校验装置的相对两侧。
9.其中,y轴运动组件在夹持组件夹紧多组量块后进行提升的最大行程为4mm。
10.其中,x轴运动组件包括:x轴运动电机、与x轴运动电机相连的传动带、与传动带相连的滑台、与滑台相连的x轴联动件以及直线导轨,夹爪的一端与x轴联动件相连,夹爪的底部可滑动的装设在直线导轨上,其中:x轴运动电机分别通过滑台、x轴联动件带动夹爪沿直线导轨在行程内往复运动。
11.其中,x轴运动组件还包括:用以改变x轴运动电机工作状态的限位传感器;x轴运
动电机为直流有刷行星减速电机。
12.其中,x轴运动组件在夹持组件夹紧多组量块后进行移动的最大行程为22mm。
13.实施本发明的气动式深度卡尺自动校验装置,具有如下的有益效果:夹持组件包括:夹爪、开设在夹爪顶部的装配槽、装设在装配槽中的第一充气式密封件、第一电动气泵以及与第一电动气泵相连的第一集成电磁阀,其中:设备箱的顶面上设有多个插口,量块由插口插置于设备箱的内部,并由夹持组件夹持,控制启动第一电动气泵和第一集成电磁阀的相应端口,第一充气式密封件充气膨胀对放置在装配槽中的多组量块进行夹紧,可同步夹持或释放多组量块,自动测量深度卡尺内端和外端的示值误差;结构布局紧凑合理,提升检测效率。
附图说明
14.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.图1为本发明实施例气动式深度卡尺自动校验装置的外部结构示意图。
16.图2为本发明实施例气动式深度卡尺自动校验装置的传动系统的结构示意图。
17.图3为本发明实施例气动式深度卡尺自动校验装置传动系统的夹持组件的结构示意图。
18.图4为本发明实施例气动式深度卡尺自动校验装置传动系统的y轴运动组件的局部结构示意图。
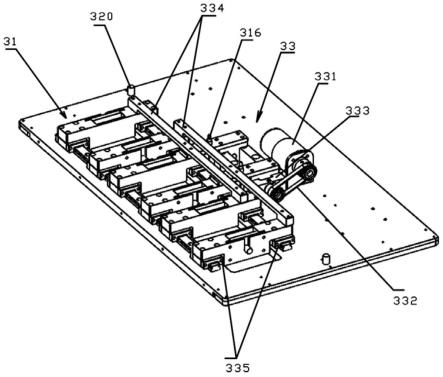
19.图5为本发明实施例气动式深度卡尺自动校验装置传动系统的x轴运动组件的结构示意图。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.如图1-图5所示,为本发明气动式深度卡尺自动校验装置的实施例一。
22.本实施例中的气动式深度卡尺自动校验装置,用于自动测量深度卡尺内端和外端的示值误差,包括:箱体t,箱体t包括控制箱1、设备箱2以及装设在设备箱内部的由控制箱1进行操控的传动系统3;传动系统3包括:底板3a、压板3b、用以联动压板3b相对于底板3a进行往复移动的y轴运动组件32以及分别装配在底板3a上的x轴运动组件33和夹持组件31,夹持组件31装配在x轴运动组件33上。
23.夹持组件31包括:夹爪311、开设在夹爪311顶部的装配槽311a、装设在装配槽311a中的第一充气式密封件312、第一电动气泵313以及与第一电动气泵313相连的第一集成电磁阀314,其中:设备箱2的顶面上设有多个插口21,22,23,量块由插口21,22,23分别对应插置在设备箱内部夹持组件31的装配槽311a中,并由夹持组件31夹持,控制启动第一电动气
泵313和第一集成电磁阀314的相应端口,第一充气式密封件312充气膨胀对放置在装配槽311a中的多组量块进行夹紧。
24.具体实施时,深度卡尺检定使用的量块是3个尺寸,为通用卡尺检定规程jjg30-2012中规定的尺寸要求。箱体t为异形状,控制箱1及设备箱2相邻而设,两者可拆卸相连。控制箱1呈立方状,设备箱2的一侧呈阶梯状布置,即设备箱2设有呈阶梯状的顶面,在设备箱2的顶面上设有多个插口21,22,23,量块分别由插口21,22,23插置于设备箱2的内部,对应插置在设备箱内部夹持组件31的装配槽311a中,可在夹持组件33实施夹持时进行固定。
25.本实施例中,夹持组件31设为结构对称布置的两套三组,三组夹持组件31对多组量块同步夹持或同步释放。夹持组件31包括:夹爪311、开设在夹爪311顶部的装配槽311a、装设在装配槽311a中的第一充气式密封件312、第一电动气泵313以及与第一电动气泵313相连的第一集成电磁阀314。
26.实施时,控制启动第一电动气泵313和第一集成电磁阀314的相应端口,第一充气式密封件312充气膨胀对放置在装配槽311a中的多组量块进行夹紧。实施过程中,可以持续控制第一电动气泵313及第一集成电磁阀314的相应端口,保持第一充气式密封件312对量块的夹紧。控制第一集成电磁阀314的相应端口关闭,第一充气式密封件312恢复原状态,夹爪311松开量块。
27.进一步的,y轴运动组件32的作用是:基于量块和平台都是标准器,精度要求很高,联动压板3b相对于底板3a进行往复移动,能够防止量块和平台之间的摩擦。
28.y轴运动组件32包括:第二电动气泵、与第二电动气泵相连的第二集成电磁阀以及与第二集成电磁阀相连的第二充气式密封件320,第二充气式密封件320装设在底板3a和压板3b之间,其中:控制启动第二电动气泵和第二集成电磁阀的相应端口,第二充气式密封件320充气膨胀,调整改变压板3b与底板3a之间的相对位置。
29.具体实施时,y轴运动组件32所使用的第二电动气泵、第二集成电磁阀的工作原理与夹持组件31所使用的第一电动气泵、第一集成电磁阀的工作原理相同。两组件可使用同一电动气泵和同一集成电磁阀实施分别操作作业,也可使用功能相同但不同的电动气泵或电磁阀实施操控作业。
30.y轴运动组件的运动原理是:在夹持组件31夹紧量块后,控制控制启动第二电动气泵和第二集成电磁阀的相应端口,第二充气式密封件320充气膨胀,调整改变压板3b与底板3a之间的相对位置,推动底板3a及其上的x轴运动组件33和夹持组件31提升脱离压板3b,同时夹持组件31所夹紧的量块也脱离测试台表面;紧接着,放下量块时,控制第二集成电磁阀的相应端口关闭,两侧的第二充气式密封件320恢复初始状态,底板3a及其上的部件下降至测试台后停止。
31.优选的,y轴运动组件在夹持组件夹紧多组量块后进行提升的最大行程为4mm。
32.进一步的,x轴运动组件33的作用是:带动夹持组件31在行程内往复运动,使量块停留在不同的位置,以满足深度卡尺的校验。
33.其中,x轴运动组件33装配在底板3a上,其包括:x轴运动电机331、与x轴运动电机331相连的传动带332、与传动带332相连的滑台333、与滑台333相连的x轴联动件334以及直线导轨335,夹爪311的一端与x轴联动件334相连,夹爪311的底部可滑动的装设在直线导轨335上,其中:x轴运动电机331分别通过滑台333、x轴联动件334带动夹爪311沿直线导轨335
在行程内往复运动。
34.进一步的,x轴运动组件33还包括:用以改变x轴运动电机331工作状态的限位传感器336;
35.x轴运动组件33的运动原理是:在夹持组件31夹紧量块及y轴运动组件32提升量块后,控制x轴运动电机331运行,通过滑台333、x轴联动件334带动夹爪311沿直线导轨335在行程内往复运动,直至触发内侧或外侧限位传感器336后,x轴运动电机331停止运行。
36.优选的,x轴运动电机331为直流有刷行星减速电机。如此,无需额外增加驱动器可直接驱动,电机轴配合齿轮可直接通过传动带332联动滑台333。
37.优选的,x轴运动组件33在夹持组件31夹紧多组量块后进行移动的最大行程为22mm,如此,满足左右搬运量块的运动行程需求。
38.本实施例中的气动式深度卡尺自动校验装置在具体实施时,通过控制箱1点动设备运行,夹持组件31的夹爪311同时且自动在设定位置夹紧3组量块;装配在两侧的y轴运动组件32在设备夹持组件31夹紧量块后提升一定距离、使量块脱离地面。x轴运动组件33在夹紧并提升量块后,承载量块和夹持组件31同时左/右运动,直至触碰两端的限位传感器336后停止。再次通过控制箱1点动设备运行按钮后,设备两侧同时且自动夹持、提升、返回及放下量块。
39.实施本发明的气动式深度卡尺自动校验装置,具有如下的有益效果:
40.第一、夹持组件包括:夹爪、开设在夹爪顶部的装配槽、装设在装配槽中的第一充气式密封件、第一电动气泵以及与第一电动气泵相连的第一集成电磁阀,其中:设备箱的顶面上设有多个插口,量块由插口插置于设备箱的内部,并由夹持组件夹持,控制启动第一电动气泵和第一集成电磁阀的相应端口,第一充气式密封件充气膨胀对放置在装配槽中的多组量块进行夹紧,可同步夹持或释放多组量块,自动测量深度卡尺内端和外端的示值误差。
41.第二、结构布局紧凑合理,提升检测效率,控制精度高,操作方便快捷。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。