1.本发明涉及轨道板校正的技术领域,尤其是涉及一种无砟轨道板的智能精调方法、系统、设备及存储介质。
背景技术:
2.我国高速铁路板式无砟轨道通常采用crtsi 型无砟轨道,crtsii型无砟轨道,crtsiii型无砟轨道,其主要结构一般由钢轨、弹性扣件、轨道板、底座(支撑层)及其与轨道板之间的填充层(如crtsii型无砟轨道的ca砂浆层,crtsiii型无砟轨道自密实混凝土、隔离层及弹性缓冲垫层)等组成。
3.相关技术中,在无砟轨道板的施工过程中,一般将无砟轨道板铺设在现场的混凝土支撑层或现场浇注的钢筋混凝土底座(桥梁)上;由于无砟轨道板铺设过程中可能出现偏移,进而导致铺设完成后的无砟轨道板位置出现偏移,因此,在无砟轨道板铺设完成后,需要人工利用测量工具对无砟轨道板的位置进行测量并进行测量数据的记录和汇总,最后根据测量数据对无砟轨道板的位置进行调整校正。
4.在实现本技术的过程中,发明人发现上述技术问题至少存在以下问题:采用人工对无砟轨道板的位置进行测量,耗时费力,且人工测量的误差较大,影响了测量精度和测量效率。
技术实现要素:
5.为了改善人工测量无砟轨道板的位置误差较大而影响测量精度和测量效率的问题,本技术提供一种无砟轨道板的智能精调方法、系统、设备及存储介质。
6.第一方面,本技术提供一种无砟轨道板的智能精调方法,采用如下的技术方案:一种无砟轨道板的智能精调方法,该方法应用于无砟轨道板的智能纠偏设备,所述智能纠偏设备包括用于检测无砟轨道板位置信息的位置采集组件以及用于实时测量无砟轨道板位移距离的位移采集组件,所述方法包括:获取所述位置采集组件发送的无砟轨道板位于混凝土支撑层上的整体位置信息,所述整体位置信息包括无砟轨道板位于混凝土支撑层上的初始坐标点;调取预先存储在位置坐标数据库中的标准坐标点,将所述初始坐标点与所述标准坐标点进行比对,并计算所述初始坐标点与所述标准坐标点之间的差值,将所述差值设置为偏移量;判断所述偏移量是否大于预设的偏移标准量;若是,则判定所述初始坐标点为偏移点,并输出带有无砟轨道板位于混凝土支撑层上的偏移点对应的偏移量相关的纠偏提醒信息;获取所述位移采集组件实时发送的无砟轨道板位于混凝土支撑层上的偏移点的距离信息,所述距离信息包括偏移点的移动距离的位移量;将所述位移量与所述偏移量进行比对,若所述位移量与所述偏移量一致,则输出
带有无砟轨道板位于混凝土支撑层上的位置纠偏完成相关的纠偏警示信息。
7.通过采用上述技术方案,在将无砟轨道板铺设在混凝土支撑层上后,首先通过位置采集组件采集无砟轨道板位于混凝土支撑层上的整体位置信息,然后计算整体位置信息中无砟轨道板位于混凝土支撑层上的初始坐标点与预设的标准坐标点之间的差值,并将差值设置为偏移量;若偏移量大于预设的偏移标准量,则判定初始坐标点为偏移点,且说明无砟轨道板位于混凝土支撑层上的位置存在偏移的情况,此时输出带有偏移点对应的偏移量的纠偏提醒信息,以便于根据偏移量来调整无砟轨道板的位置;当无砟轨道板的位置在被调整的过程中时,利用位移采集组件实时采集偏移点的移动距离所对应的位移量,若位移量与偏移量一致,则说明无砟轨道板的位置纠偏完成;通过位移采集组件和位置采集组件的配合,实现了在调整无砟轨道板的位置过程中,实时测量无砟轨道板的位移距离,方便实时测量和调整无砟轨道板的位置,以便快速的将无砟轨道板的位置调整至标准位置,代替人工手动测量,省时省力,提高了测量效率和测量精度。
8.可选的,所述智能纠偏设备还包括图像采集组件,在所述输出带有无砟轨道板位于混凝土支撑层上的偏移点对应的偏移量相关的纠偏提醒信息之前,还包括:获取所述图像采集组件发送的无砟轨道板位于混凝土支撑层上的初始图片信息;在所述输出带有无砟轨道板位于混凝土支撑层上的偏移点对应的偏移量相关的纠偏提醒信息之后,还包括:在经过预设的第一时间段后,获取所述图像采集组件发送的无砟轨道板位于混凝土支撑层上的实际图片信息;将所述实际图片信息与所述初始图片信息进行比对,若所述实际图片信息与所述初始图片信息不一致,则判定无砟轨道处于正在被纠偏的状态,并获取所述位移采集组件实时发送的无砟轨道板位于混凝土支撑层上的偏移点的距离信息。
9.通过采用上述技术方案,在输出纠偏提醒信息之后的第一时间段后,若无砟轨道板位于混凝土支撑层上的实际图片信息与在输出纠偏提醒信息之前无砟轨道板位于混凝土支撑层上的初始图片信息不一致,则说明无砟轨道处于正在被纠偏的状态;若在实际图片信息与初始图片信息一致,则说明无砟轨道板处于未被纠偏的状态;当无砟轨道板处于未被开始纠偏的状态时,利用位移采集组件采集到的无砟轨道板的位移量为零,通过在利用位移采集组件采集偏移点的移动距离之前,先自动识别无砟轨道板是否处于被纠偏的状态,无需通过人工识别,省时省力;且通过自动识别无砟轨道板的状态,尽量避免因还未开始对无砟轨道板纠偏而导致直接通过位移采集组件采集无砟轨道板的位移量,有助于降低位移采集组件无效作业的概率,以提高测量效率。
10.可选的,在将所述实际图片信息与所述初始图片信息进行比对之前,还包括:根据所述初始坐标点和偏移量,绘制出无砟轨道板位于混凝土支撑层上的虚拟图像信息;所述将所述实际图片信息与所述初始图片信息进行比对,包括:若所述虚拟图像信息与所述实际图片信息一致,则判定无砟轨道板处于被纠偏完成的状态;若所述虚拟图像信息与所述实际图片信息不一致,则将所述实际图片信息与所述初始图片信息进行比对。
11.通过采用上述技术方案,当实际图片信息与虚拟图像信息一致时,则判定无砟轨道板处于被纠偏完成的状态;由于无砟轨道板的位置调整至标准位置时,实际图片信息也与初始图片信息不一致,因此在对实际图片信息与初始图片信息进行比对之前,先排除无砟轨道板处于被纠偏完成的状态,以便区分无砟轨道板处于正在被纠偏的状态和处于被纠偏完成的状态,降低了误判的概率,提高了对无砟轨道板状态判断的准确性。
12.可选的,所述在判定无砟轨道板处于被纠偏完成的状态之后,还包括:再次获取所述位置采集组件发送的无砟轨道板位于混凝土支撑层上的核对位置信息,所述核对位置信息包括无砟轨道板位于混凝土支撑层上的核对坐标点;将所述核对坐标点与所述标准坐标点进行比对;若所述核对坐标点与所述标准坐标点一致,则判定无砟轨道板处于被纠偏完成的状态。
13.通过采用上述技术方案,对无砟轨道板的位置纠偏完成后,利用位置采集组件再次对无砟轨道板位于混凝土支撑层上的位置信息进行采集,以得到核对位置信息,若核对位置信息中的核对坐标点与标准坐标点一致,则说明无砟轨道板处于被纠偏完成的状态;通过判断对无砟轨道板是否纠偏完成,实现了无砟轨道板位置的复核,提高了测量精度。
14.可选的,在所述判定无砟轨道板处于被纠偏成功的状态之后,还包括:在经过预设的第二时间段之后,再次获取所述位置采集组件发送的无砟轨道板位于混凝土支撑层上的复核位置信息,所述复核位置信息包括无砟轨道板位于混凝土支撑层上的复核坐标点;将所述复核坐标点与所述标准坐标点进行比对;若所述复核坐标点与所述标准坐标点不一致,则计算所述复核坐标点与所述标准坐标点之间的复核间距值,将所述复核间距值设置为复核量;输出带有无砟轨道板位于混凝土支撑层上的复核坐标点对应的复核量的复核纠偏提醒信息。
15.通过采用上述技术方案,在经过预设的第二时间段之后,通过位置采集组件再次获取无砟轨道板位于混凝土支撑层上的复核坐标点,若复核坐标点与标准坐标点一致,则说明无砟轨道板的位置处于被纠偏完成的状态,实现了对无砟轨道板的位置的二次复核,进一步提高了测量精度;若复核坐标点与标准坐标点不一致,则说明无砟轨道板被纠偏完成后,又出现位置偏移的现象,此时计算复核坐标点与标准坐标点之间的复核间距值,并将复核间距值设置为复核量,通过输出带有复核坐标点对应的复核量的纠偏提醒信息,以提醒人员无砟轨道的位置再次出现偏移,即需要对无砟轨道的位置再次纠偏,进一步提高了测量精度。
16.可选的,在所述获取所述位置采集组件发送的无砟轨道板位于混凝土支撑层上的整体位置信息之前,还包括:当接收到启动指令时,向所述位置采集组件发送检测无砟轨道板位于混凝土支撑层上的整体位置信息相关的执行指令;在预设的第三时间段之后,判断是否接收到所述位置采集组件反馈的无砟轨道板位于混凝土支撑层上的整体位置信息;若否,则再次向位置采集组件发送检测无砟轨道板位于混凝土支撑层上的整体位置信息相关的执行指令。
17.通过采用上述技术方案,在位置采集组件接收到执行指令的第三时间段之后,若没有接收到位置采集组件反馈的无砟轨道板位于混凝土支撑层上的整体位置信息,则说明位置采集组件可能存在未接收到执行指令或发生故障的情况,此时再次向位置采集组件发送执行指令,以使位置采集组件采集无砟轨道板位于混凝土支撑层上的整体位置信息,提高了测量效率。
18.可选的,在所述输出带有无砟轨道板位于混凝土支撑层上的位置纠偏完成相关的纠偏提醒信息之后,还包括:对所述标准坐标点、初始坐标点以及偏移量进行记录,并生成无砟轨道动态学习调整表;所述调取预先存储在位置坐标数据库中的标准坐标点,包括:若在所述无砟轨道动态学习调整表内查询到所述初始坐标点,则在所述无砟轨道动态学习调整表中调取与所述初始坐标点对应的偏移量,并输出带有初始坐标点对应的偏移量相关的纠偏警示信息;若在所述无砟轨道动态学习调整表内未查询到所述初始坐标点,则将所述初始坐标点与所述标准坐标点进行比对,并计算所述初始坐标点与所述标准坐标点之间的差值,将所述差值设置为偏移量。
19.通过采用上述技术方案,通过在对无砟轨道板的位置纠偏完成后,将对无砟轨道调整过程中的标准坐标点、初始坐标点和偏移量进行记录,进而生出无砟轨道动态学习调整表,使得对其他的无砟轨道板进行位置调整过程中,在接收到位置采集组件发送的无砟轨道板位于混凝土支撑层上的整体位置信息时,先根据整体位置信息中的初始坐标点,判断无砟轨道动态学习调整表中是否存在初始坐标点;若有,则直接调取无砟轨道动态学习调整表中与初始坐标点对应的偏移量,即可直接输出初始坐标点对应的偏移量的纠偏提醒信息,节省了计算偏移量的时间,进一步提高了测量效率;否则,将初始坐标点与标准坐标点进行比对,并计算初始坐标点与标准坐标点之间的差值,并将差值设置为偏移量。
20.第二方面,本技术提供一种无砟轨道板的智能纠偏设备,采用如下的技术方案:该系统应用于无砟轨道板的智能纠偏设备,所述智能纠偏设备包括用于检测无砟轨道板位置信息的位置采集组件以及用于实时测量无砟轨道板位移距离的位移采集组件,所述系统包括:位置信息采集模块,用于获取所述位置采集组件发送的无砟轨道板位于混凝土支撑层上的整体位置信息,所述整体位置信息包括无砟轨道板位于混凝土支撑层上的初始坐标点;位置偏移检测模块,用于调取预先存储在位置坐标数据库中的标准坐标点,将所述初始坐标点与所述标准坐标点进行比对,并计算所述初始坐标点与所述标准坐标点之间的差值,将所述差值设置为偏移量;位置纠偏提醒模块,用于判断所述偏移量是否大于预设的偏移标准量;若是,则判定所述初始坐标点为偏移点,并输出带有无砟轨道板位于混凝土支撑层上的偏移点对应的偏移量的纠偏提醒信息;距离信息采集模块,用于获取所述位移采集组件实时发送的无砟轨道板位于混凝土支撑层上的偏移点的距离信息,所述距离信息包括偏移点的移动距离的位移量;
纠偏完成提醒模块,用于将所述位移量与所述偏移量进行比对,若所述位移量与所述偏移量一致,则输出带有无砟轨道板位于混凝土支撑层上的位置纠偏完成相关的纠偏警示信息。
21.通过采用上述技术方案,对无砟轨道板铺设完成后,通过位置采集组件采集无砟轨道板位于混凝土支撑层上的整体位置信息,整体位置信息中包括无砟轨道位于混凝土支撑层上的初始坐标点,设置初始坐标点与标准坐标点之间的差值为偏移量,若偏移量大于预设的偏移标准量,则说明无砟轨道板位于混凝土支撑层上的位置存在偏移的情况,进而判定初始坐标点为偏移点,通过输出带有与偏移点对应的偏移量的纠偏提醒信息,以便于根据偏移量对无砟轨道板进行纠偏;在对无砟轨道板的位置纠偏的过程中,利用位移采集组件实时采集偏移点的移动距离所对应的位移量,若位移量与偏移量一致时,说明无砟轨道的位置纠偏完成;通过在纠偏过程中,对无砟轨道板的位移量实时测量,省时省力,提高了对无砟轨道板的测量效率和测量精度,进而提高了施工效率。
22.第三方面,本技术提供一种计算机设备,采用如下的技术方案:包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行如上所述任一种无砟轨道板的智能精调方法的计算机程序。
23.第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:存储有能够被处理器加载并执行上述任一种无砟轨道板的智能精调方法的计算机程序。
24.综上所述,本技术包括以下至少一种有益技术效果:利用位置采集组件采集到无砟轨道板的整体位置信息后,若无砟轨道板的位置出现偏移,通过计算出无砟轨道板的偏移点对应的偏移量,并输出带有偏移点对应的偏移量相关的纠偏提醒信息,以便于根据偏移量调整无砟轨道板的位置,在调整无砟轨道板的位置的过程中,利用位移采集组件采集无砟轨道板的偏移点移动的位移量,若位移量与偏移量一致时,则说明无砟轨道板的位置调整完成,通过在调整无砟轨道板的位置过程中,对无砟轨道板的偏移点移动的距离实时测量,提高了对无砟轨道板的测量精度和测量效率,省时省力;由于无砟轨道板的位置调整至标准位置时,实际图片信息也与初始图片信息不一致,因此在对实际图片信息与初始图片信息进行比对之前,先排除无砟轨道板处于被纠偏完成的状态,以便区分无砟轨道板处于正在被纠偏的状态和处于被纠偏完成的状态,降低了误判的概率,提高了对无砟轨道板的状态的判断准确性;在位置采集组件接收到执行指令的第三时间段之后,若没有接收到位置采集组件反馈的无砟轨道板位于混凝土支撑层上的整体位置信息,则说明位置采集组件可能存在发生故障或未接收到执行指令的情况,此时再次向位置采集组件发送执行指令,以使位置采集组件采集无砟轨道板位于混凝土支撑层上的整体位置信息,提高了测量效率。
附图说明
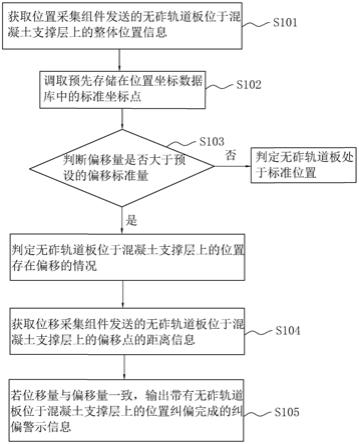
25.图1是本技术实施例中无砟轨道板的智能精调方法的流程图。
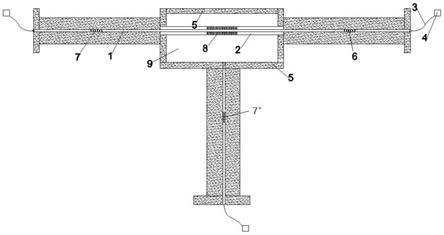
26.图2是本技术实施例中无砟轨道板位于混凝土支撑层上的位置关系的结构示意图。
27.图3是本技术实施例中无砟轨道板的智能精调系统的结构框图。
28.附图标记说明:201、位置信息采集模块;202、位移偏移检测模块;203、位置纠偏提醒模块;204、距离信息采集模块;205、纠偏完成提醒模块。
具体实施方式
29.以下结合附图1-3对本技术作进一步详细说明。
30.本技术实施例公开一种无砟轨道板的智能精调方法,该方法基于一种无砟轨道板的智能纠偏设备,智能纠偏设备包括用于检测无砟轨道板位置信息的位置采集组件以及用于实时测量无砟轨道板位移距离的位移采集组件。其中,位置采集组件可以为全站仪,位移采集组件可以为激光测距传感器、红外测距传感器等测距设备,本实施例中的位移采集组件选用激光测距传感器;本实施例中,全站仪和激光测距传感器均通过蓝牙模块与智能纠偏设备建立通信连接;智能纠偏设备通过无线通信模块通信连接有操控面板,当将无砟轨道板铺设在混凝土支撑层上后,人员能够通过操控面板向智能纠偏设备发送启动指令,以便智能纠偏设备控制位置采集组件和位移采集组件工作。
31.如图1所示,该方法包括以下步骤:s101,获取位置采集组件发送的无砟轨道板位于混凝土支撑层上的整体位置信息。
32.具体来说,在将无砟轨道板铺设在混凝土支撑层上后,人员通过控制面板向智能纠偏设备发送启动指令,智能纠偏设备在接收到启动指令后,向全站仪发送采集无砟轨道板位于混凝土支撑层上的整体位置信息的指令,全站仪启动并将采集到无砟轨道板位于混凝土支撑层上的整体位置信息回传给智能纠偏设备。
33.如图2所示,整体位置信息包括无砟轨道板位于混凝土支撑层e上初始位置的四个拐角处分别对应的初始坐标点,即整体位置信息包括四个初始坐标点a、b、c、d;其中,本实施例中,混凝土支撑层e为固定的,无砟轨道板是移动的,以混凝土支撑层e为标准,对无砟轨道板相对于混凝土支撑层e上的位置进行坐标标注。
34.s102,调取预先存储在位置坐标数据库中的标准坐标点。
35.具体来说,如图2所示,智能纠偏设备的控制系统中预先建立有位置坐标数据库,位置坐标数据库中预先存储有无砟轨道板相对于混凝土支撑层e上的标准位置信息,标准位置信息包括无砟轨道板相对于混凝土支撑层e上的四个拐角处分别对应的标准坐标点,四个标准坐标点分别为a
′
、b
′
、c
′
、d
′
,因此标准坐标点为无砟轨道板相对于混凝土支撑层e上的标准位置,当无砟轨道板铺设完成时,若无砟轨道板的位置出现偏移的情况时,需要将无砟轨道板的位置调整至标准坐标点相同的标准位置。
36.通过在位置坐标数据库中分别调取与四个初始坐标点一一对应的标准坐标点之后,将初始坐标点与标准坐标点进行比对,若初始坐标点与标准坐标点一致,则说明无砟轨道板位于混凝土支撑层上的位置不存在偏移的情况,即无需对无砟轨道板的位置进行调整;若初始坐标点与标准坐标点不一致时,则说明无砟轨道板位于混凝土支撑层上的位置存在偏移的情况,此时计算初始坐标点与标准坐标点之间的差值,并将差值设置为偏移量,该偏移量即为无砟轨道板位于混凝土支撑层上的位置相对于准确位置的偏移量。
37.s103,判断偏移量是否大于预设的偏移标准量。
38.具体来说,将偏移量与预设的偏移标准量进行比对,判断偏移量是否大于预设的
偏移标准量,若是,则说明无砟轨道板位于混凝土支撑层上的位置存在偏移的情况,则判定存在偏移的初始坐标点为偏移点,此时输出带有无砟轨道板位于混凝土支撑层上的偏移点对应的偏移量的纠偏提醒信息,以便于智能纠偏设备根据偏移点对应的偏移量来对无砟轨道板进行纠偏;若否,则说明无砟轨道板处于标准位置。
39.s104,获取位移采集组件实时发送的无砟轨道板位于混凝土支撑层上的偏移点的距离信息。
40.具体来说,在判定无砟轨道的位置存在偏移的情况后,可以由人工通过控制面板向智能纠偏设备发送用于启动激光测距传感器的指令,激光测距传感器在接收到智能纠偏设备传输的启动指令后,激光测距传感器对无砟轨道板的偏移点的移动距离实时测量,并将测量到的偏移点的距离信息回传给智能纠偏设备,其中,距离信息包括偏移点的移动距离的位移量。
41.s105,若位移量与偏移量一致,则输出带有无砟轨道板位于混凝土支撑层上的位置纠偏完成的纠偏警示信息。
42.具体来说,通过将位移量与偏移量进行比对,当位移量与偏移量一致时,则说明无砟轨道板的位置纠偏完成,此时智能纠偏设备输出带有无砟轨道板位于混凝土支撑层上的位置纠偏完成相关的纠偏警示信息,以使人员获知无砟轨道板的位置调整完成。
43.采用上述步骤,通过全站仪和激光测距传感器的配合,先计算出无砟轨道板需要调整的偏移量,以便于人员或自动纠偏设备根据偏移量来对无砟轨道板的位置进行纠偏,同时在对无砟轨道板的位置调整过程中,利用激光测距传感器实时测量无砟轨道板的偏移点对应的偏移量,有助于提高测量效率和测量精度。
44.在一个实施例中,考虑到无砟轨道板还未开始被纠偏时,激光测距传感器此时对无砟轨道板的偏移点测距而存在无效作业的问题,智能纠偏设备还包括图像采集组件,图像采集组件可以为摄像头,利用摄像头拍摄无砟轨道板位于混凝土支撑层上的图片,在输出带有无砟轨道板位于混凝土支撑层上的偏移点对应的偏移量相关的纠偏提醒信息之前,还可以存在如下处理:获取图像采集组件发送的无砟轨道板位于混凝土支撑层上的初始图片信息。
45.具体来说,在智能纠偏设备发送与偏移点对应的偏移量相关的纠偏提醒信息之前,利用摄像头对无砟轨道板位于混凝土支撑层上的初始位置进行拍摄,得到初始图片信息,初始图片信息即为铺设完成时,无砟轨道板位于混凝土支撑层上的位置的图片,然后摄像头将初始图片信息回传给智能纠偏设备。
46.智能纠偏设备在输出带有无砟轨道板位于混凝土支撑层上的偏移点对应的偏移量相关的纠偏提醒信息之后,智能纠偏设备可能开始对无砟轨道板的位置进行调整,在经过预设的第一时间段之后,举例来说,预设的第一时间段可以设置为1分钟,在经过1分钟后,利用摄像头拍摄无砟轨道板位于混凝土支撑层上的实际图片信息,并且摄像头将拍摄到的实际图片信息回传给智能纠偏设备。
47.然后,智能纠偏设备将实际图片信息与初始图片信息进行比对,若实际图片信息与初始图片信息一致,则说明无砟轨道处于未被纠偏的状态;若实际图片信息与初始图片信息不一致,则说明无砟轨道处于正在被纠偏的状态,在判定无砟轨道处于正在被纠偏的状态后,向激光测距传感器发送启动指令,此时激光测距传感器接收启动指令开始工作,并
向智能纠偏设备实时发送检测到的无砟轨道板位于混凝土支撑层上的偏移点的距离信息。采用上述方案,实现了对无砟轨道板的调整状态的自动识别,尽量避免在还没有调整无砟轨道板的位置时,激光测距传感器无效作业,无需通过人工识别无砟轨道板的调整状态,省时省力,提高了测量效率。
48.在一个实施例中,考虑到当无砟轨道板被纠偏完成时,实际图片信息也与初始图片信息不一致的情况,在将实际图片信息与初始图片信息进行比对之前,还可以实施如下步骤:根据初始坐标点和偏移量,绘制出无砟轨道板位于混凝土支撑层上的虚拟图像信息。
49.具体来说,虚拟图像信息即为无砟轨道板位于混凝土支撑层上的标准位置对应的图像信息,根据初始坐标点和偏移量,能够绘制出无砟轨道板的标准位置所对应的虚拟图像信息。
50.因此,将实际图片信息与初始图片信息进行对比的处理可以如下:通过将虚拟图像信息与实际图片信息比对,若虚拟图像信息与实际图片信息不一致,则说明无砟轨道处于未被纠偏完成的状态,此时将实际图片信息与初始图片信息进行比对,若实际图片信息与初始图片信息不一致,则判定无砟轨道板处于正在被纠偏的状态,并获取激光测距传感器实时发送的无砟轨道板位于混凝土支撑层上的偏移点的距离信息;若虚拟图像信息与实际图片信息一致,则说明无砟轨道板处于被纠偏完成的状态。采用上述方案,实现了对判断无砟轨道板的状态的精准性,尽量避免在未开始对无砟轨道板调整位置时,激光测距传感器工作而无效作业,提高了测量效率。
51.在一个实施例中,考虑到无砟轨道板纠偏完成后的短时间内,可能存在无砟轨道板被人员不小心弄偏移的情况,在判定无砟轨道板处于被纠偏完成的状态之后,还可以执行如下步骤:再次获取全站仪发送的无砟轨道板位于混凝土支撑层上的核对位置信息。
52.具体来说,在对无砟轨道板的位置纠偏完成后,再次向全站仪发送采集无砟轨道板位于混凝土支撑层上的核对位置信息的指令,全站仪接收到指令后对无砟轨道板位于混凝土支撑层上的位置进行测量,得到核对位置信息,并将核对位置信息回传给智能纠偏设备;其中,核对位置信息包括无砟轨道板位于混凝土支撑层上的核对坐标点。
53.智能纠偏设备在接收到全站仪回传的核对位置信息之后,将核对坐标点与标准坐标点进行比对,若核对坐标点与标准坐标点一致,则判定无砟轨道板处于被纠偏完成的状态,实现了对无砟轨道板位于混凝土支撑层上的实际与预先设置的无砟轨道板的参考位置进行核对,提高了测量精度。
54.在一个实施例中,考虑到对无砟轨道板初次复核后,无砟轨道板还有可能被工作人员不小心弄偏移的情况,在判定无砟轨道板处于被纠偏完成的状态之后,还可以执行如下步骤:在经过预设的第二时间段之后,再次获取全站仪发送的无砟轨道板位于混凝土支撑层上的复核位置信息。
55.具体来说,复核位置信息包括无砟轨道板位于混凝土支撑层上的复核坐标点;在对无砟轨道板的位置进行核对后,且在经过预设的第二时间段之后,利用全站仪再次对无
砟轨道板的位置进行测量,并将复核坐标点与标准坐标点进行比对,若复核坐标点与标准坐标点一致,则说明无砟轨道板的位置不存在偏移的情况;若复核坐标点与标准坐标点不一致,则说明无砟轨道板的位置存在偏移的情况,此时复核坐标点与标准坐标点之间的复核间距值,并将间距值设置为复核量;输出带有无砟轨道板位于混凝土支撑层上的复核坐标点对应的复核量的复核纠偏提醒信息,以使人员或自动纠偏设备根据复核量对无砟轨道板再次纠偏;通过对无砟轨道板的位置进行二次复核,有效的降低了无砟轨道板被纠偏完成后发生偏移的概率,进一步提高了测量效率。
56.在一个实施例中,考虑到全站仪可能因为出现故障或未接收到启动指令而无法回传无砟轨道板的整体位置信息的问题,还可以存在如下处理还可以执行如下步骤:当智能纠偏设备接收到启动指令时,向全站仪发送检测无砟轨道板位于混凝土支撑层上的整体位置信息相关的执行指令。
57.具体来说,启动指令可以由人员通过控制面板发送给智能纠偏设备,也可以由自动纠偏设备自动传送给智能纠偏设备,但智能纠偏设备接收到启动指令后,向全站仪发送执行指令,进而全站仪接收到执行指令,对无砟轨道板位于混凝土支撑层上的整体位置信息进行测量;由于全站仪对无砟轨道板的位置信息测量需要花费一段时间,若在预设的第三时间段之后,举例而言,若在向全站仪发送执行指令的2分钟后,判断智能纠偏设备是否接收到全站仪反馈的无砟轨道板位于混凝土支撑层上的整体位置信息;若是,则说明全站仪在正常工作;若否,则说明全站仪可能发生故障或未接收到执行指令,此时再次向全站仪发送检测无砟轨道板位于混凝土支撑层上的整体位置信息相关的执行指令,以使全站仪接收执行指令开始工作,提高了测量效率。
58.在一个实施例中,考虑到对不同的无砟轨道板位于混凝土支撑层上的偏移量相同时,智能纠偏设备需要逐个的计算出无砟轨道板的偏移量需花费较长时间而影响测量效率的问题,在输出带有无砟轨道板位于混凝土支撑层上的位置纠偏完成相关的纠偏提醒信息之后,还可以存在如下处理:对标准坐标点、初始坐标点和偏移量进行记录,并生成无砟轨道动态学习调整表。
59.具体来说,每次对无砟轨道板的位置纠偏完成后,通过将标准坐标点、初始坐标点和位移量进行记录,并生成无砟轨道动态学习调整表,其中,无砟轨道动态学习调整表包括对无砟轨道板纠偏前无砟轨道板的初始坐标点、无砟轨道板的标准位置对应的标准坐标点以及与初始坐标点对应的纠偏数据,纠偏数据即为与初始坐标点和参考坐标点对应的纠偏量。
60.因此,调取预先存储在位置坐标数据库中的标准坐标点的处理可以如下:当智能设备获取到全站仪发送的无砟轨道板的初始坐标点时,判断无砟轨道动态学习调整表中查询是否存在初始坐标点,若在无砟轨道动态学习调整表内未查询到初始坐标点,则需要将初始坐标点与标准坐标点进行比对,并计算初始坐标点与标准坐标点之间的差值,该差值即为无砟轨道板需要调整的偏移量;若在无砟轨道动态学习调整表内查询到初始坐标点,则调取无砟轨道动态学习表内与初始坐标点对应的偏移量,并输出带有初始坐标点对应的偏移量相关的纠偏警示信息,以便智能纠偏设备直接根据偏移量来调整无砟轨道板的位置,无需重新根据初始坐标点计算得出偏移量,提高了测量效率。
61.本技术实施例的实施原理为:当将无砟轨道板铺设在混凝土支撑层上后,首先利用全站仪测量无砟轨道板位于混凝土支撑层上的初始坐标点;然后计算初始坐标点与预设的标准坐标点之间的差值,并将差值设置为偏移量;若偏移量大于预设的偏移标准量,则判定初始坐标点为偏移点,说明无砟轨道板位于混凝土支撑层上的位置存在偏移的情况,此时输出带有偏移点对应的偏移量的纠偏提醒信息,以便于根据偏移量来调整无砟轨道板的位置;同时,在无砟轨道板的位置在被调整的过程中,利用激光测距传感器实时采集偏移点的移动距离所对应的位移量,若位移量与偏移量一致,则说明无砟轨道板的位置纠偏完成;通过位移采集组件和位置采集组件的配合,实现了在调整无砟轨道板的位置过程中,实时测量无砟轨道板的位移距离,方便实时测量和调整无砟轨道板的位置,以便快速的将无砟轨道板的位置调整至标准位置,提高了测量效率和精度。
62.基于上述方法,本技术实施例还公开一种无砟轨道板的智能精调系统,该系统应用于无砟轨道板的智能纠偏设备,智能纠偏设备包括用于检测无砟轨道板位置信息的位置采集组件以及用于实时测量无砟轨道板位移距离的位移采集组件,如图3所示,该智能精调系统包括:位置信息采集模块201,用于获取位置采集组件发送的无砟轨道板位于混凝土支撑层上的整体位置信息,整体位置信息包括无砟轨道板位于混凝土支撑层上的初始坐标点;位置偏移检测模块202,用于调取预先存储在位置坐标数据库中的标准坐标点,将初始坐标点与标准坐标点进行比对,并计算初始坐标点与标准坐标点之间的差值,将差值设置为偏移量;位置纠偏提醒模块203,用于判断偏移量是否大于预设的偏移标准量;若是,则判定初始坐标点为偏移点,并输出带有无砟轨道板位于混凝土支撑层上的偏移点对应的偏移量的纠偏提醒信息;距离信息采集模块204,用于获取位移采集组件实时发送的无砟轨道板位于混凝土支撑层上的偏移点的距离信息,距离信息包括偏移点的移动距离的位移量;纠偏完成提醒模块205,用于将位移量与偏移量进行比对,若位移量与偏移量一致,则输出带有无砟轨道板位于混凝土支撑层上的位置纠偏完成相关的纠偏警示信息。
63.在一个实施例中,智能纠偏设备还包括图像采集组件,距离信息采集模块204还用于:获取图像采集组件发送的无砟轨道板位于混凝土支撑层上的初始图片信息;在输出带有无砟轨道板位于混凝土支撑层上的偏移点对应的偏移量相关的纠偏提醒信息之后,还包括:在经过预设的第一时间段后,获取图像采集组件发送的无砟轨道板位于混凝土支撑层上的实际图片信息;将实际图片信息与初始图片信息进行比对,若实际图片信息与初始图片信息不一致,则判定无砟轨道处于正在被纠偏的状态,并获取位移采集组件实时发送的无砟轨道板位于混凝土支撑层上的偏移点的距离信息。
64.在一个实施例中,距离信息采集模块204还用于:根据初始坐标点和偏移量,绘制出无砟轨道板位于混凝土支撑层上的虚拟图像信息;将实际图片信息与初始图片信息进行比对,包括:若虚拟图像信息与实际图片信息一
致,则判定无砟轨道板处于被纠偏完成的状态;若虚拟图像信息与实际图片信息不一致,则将实际图片信息与初始图片信息进行比对。
65.在一个实施例中,纠偏完成提醒模块205还用于:再次获取位置采集组件发送的无砟轨道板位于混凝土支撑层上的核对位置信息,核对位置信息包括无砟轨道板位于混凝土支撑层上的核对坐标点;将核对坐标点与标准坐标点进行比对;若核对坐标点与标准坐标点一致,则判定无砟轨道板处于被纠偏完成的状态。
66.在一个实施例中,纠偏完成提醒模块205还用于:在经过预设的第二时间段之后,再次获取位置采集组件发送的无砟轨道板位于混凝土支撑层上的复核位置信息,复核位置信息包括无砟轨道板位于混凝土支撑层上的复核坐标点;将复核坐标点与标准坐标点进行比对;若复核坐标点与标准坐标点不一致,则计算复核坐标点与标准坐标点之间的复核间距值,将复核间距值设置为复核量;输出带有无砟轨道板位于混凝土支撑层上的复核坐标点对应的复核量的复核纠偏提醒信息。
67.在一个实施例中,位置信息采集模块201还用于:当接收到启动指令时,向位置采集组件发送检测无砟轨道板位于混凝土支撑层上的整体位置信息相关的执行指令;在预设的第三时间段之后,判断是否接收到位置采集组件反馈的无砟轨道板位于混凝土支撑层上的整体位置信息;若否,则再次向位置采集组件发送检测无砟轨道板位于混凝土支撑层上的整体位置信息相关的执行指令。
68.在一个实施例中,位置偏移检测模块202还用于:对标准坐标点、初始坐标点以及偏移量进行记录,并生成无砟轨道动态学习调整表;调取预先存储在位置坐标数据库中的标准坐标点,包括:若在无砟轨道动态学习调整表内查询到初始坐标点,则在无砟轨道动态学习调整表中调取与初始坐标点对应的偏移量,并输出带有初始坐标点对应的偏移量相关的纠偏警示信息;若在无砟轨道动态学习调整表内未查询到初始坐标点,则将初始坐标点与标准坐标点进行比对,并计算初始坐标点与标准坐标点之间的差值,将差值设置为偏移量。
69.本技术实施例还公开一种计算机设备。
70.具体来说,该设备包括存储器和处理器,存储器上存储有能够被处理器加载并执行上述一种无砟轨道板的智能精调方法的计算机程序。
71.本技术实施例还公开一种计算机可读存储介质。
72.具体来说,该计算机可读存储介质,其存储有能够被处理器加载并执行如上一种无砟轨道板的智能精调方法的计算机程序,该计算机可读存储介质例如包括:u盘、移动硬盘、只读存储器(read-onlymemory,rom)、随机存取存储器(randomaccessmemory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
73.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。