技术特征:
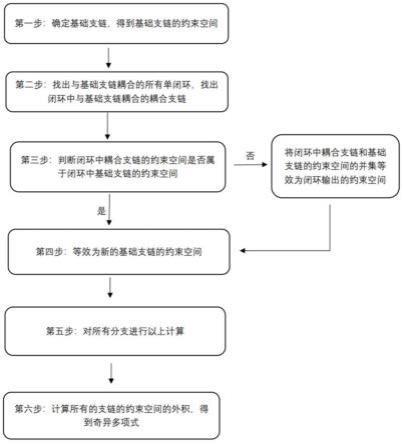
1.一种基于几何代数的多环耦合机构奇异分析方法,其特征在于,所述方法包括如下步骤:步骤s1:选定机构的定平台和动平台,划分基础分支,写出每个基础分支上运动副的运动螺旋,计算每个基础分支的分支运动空间,计算每个基础分支的约束空间;步骤s2:找出与基础分支形成闭环的所有耦合支链,写出每个耦合支链上运动副的运动螺旋,计算耦合支链上的分支运动空间,计算耦合支链的约束空间;步骤s3:判断闭环中耦合支链的约束空间是否属于闭环中基础支链的约束空间,判断方法为:将闭环中耦合支链的约束空间和闭环中基础支链的约束空间求外积运算;步骤s4:若步骤s3中外积运算结果为0,则说明闭环中两条支链的约束空间线性相关,则将闭环中基础支链的约束空间等效为闭环的约束空间;若步骤s3中外积运算结果不为0,则将基础支链和耦合支链的约束空间的并集等效为闭环输出的约束空间;步骤s5:对所有包含闭环的基础分支进行以上步骤计算;步骤s6:去除将闭环等效后每个新的等效分支上冗余和相同的约束螺旋,计算所有等效支链的约束空间的外积,得到外积系数,令外积系数为0得到机构的奇异位形。2.根据权利要求1所述的基于几何代数的多环耦合机构奇异分析方法,其特征在于,所述步骤s1与步骤s2中,螺旋在六维几何代数g6中表示为一个一维片积:s=v1e1 v2e2 v3e3 b1e4 b2e5 b3e6其中e1,e2,
…
,e6表示g6中的基底,标量系数v
i
和b
i
,i=1,2,3,表示运动副轴线的pl
ü
cker坐标。3.根据权利要求2所述的基于几何代数的多环耦合机构奇异分析方法,其特征在于,第i个分支上的所有n个运动螺旋做外积运算张成的片积s
mi
表示该分支的运动空间:s
mi
=s
i1
∧s
i2
∧
…
∧s
in
其中s
ij
(j=1,
…
,n)表示第i个分支上的第j个运动副的运动螺旋,“∧”表示外积运算符号;第i个分支施加到动平台上的分支约束空间记为s
ci
:其中表示g6中的单位伪标量的逆,“δ”表示直射变换算子,其运算为交换表示螺旋的主部系数v
i
和副部系数b
i
。4.根据权利要求1所述的基于几何代数的多环耦合机构奇异分析方法,其特征在于,所述步骤s3与步骤s4中,等效支链的处理方法为:确定基础分支后,找出闭环中与基础分支耦合的耦合支链,第i个基础分支的约束空间为s
ci
,与第i个基础分支耦合的耦合支链约束空间为s
ci1
,s
ci2
,
…
,s
cij
,计算闭环上每个分支的约束空间的外积,表示为:s
ci
∧s
cij
。5.根据权利要求4所述的基于几何代数的多环耦合机构奇异分析方法,其特征在于,若外积结果为0,说明两个分支的约束空间线性相关,则用其一条分支等效代替闭环结构进行奇异分析;若外积结果不为0,将约束空间分解为约束子空间,判断和去除冗余的约束子空间,将
线性不相关的约束子空间作并集,代替闭环的约束空间。6.一种基于几何代数的多环耦合机构奇异分析系统,其特征在于,所述系统包括如下模块:模块m1:选定机构的定平台和动平台,划分基础分支,写出每个基础分支上运动副的运动螺旋,计算每个基础分支的分支运动空间,计算每个基础分支的约束空间;模块m2:找出与基础分支形成闭环的所有耦合支链,写出每个耦合支链上运动副的运动螺旋,计算耦合支链上的分支运动空间,计算耦合支链的约束空间;模块m3:判断闭环中耦合支链的约束空间是否属于闭环中基础支链的约束空间,判断方法为:将闭环中耦合支链的约束空间和闭环中基础支链的约束空间求外积运算;模块m4:若模块m3中外积运算结果为0,则说明闭环中两条支链的约束空间线性相关,则将闭环中基础支链的约束空间等效为闭环的约束空间;若模块m3中外积运算结果不为0,则将基础支链和耦合支链的约束空间的并集等效为闭环输出的约束空间;模块m5:对所有包含闭环的基础分支进行以上模块计算;模块m6:去除将闭环等效后每个新的等效分支上冗余和相同的约束螺旋,计算所有等效支链的约束空间的外积,得到外积系数,令外积系数为0得到机构的奇异位形。7.根据权利要求6所述的基于几何代数的多环耦合机构奇异分析系统,其特征在于,所述模块m1与模块m2中,螺旋在六维几何代数g6中表示为一个一维片积:s=v1e1 v2e2 v3e3 b1e4 b2e5 b3e6其中e1,e2,
…
,e6表示g6中的基底,标量系数v
i
和b
i
,i=1,2,3,表示运动副轴线的pl
ü
cker坐标。8.根据权利要求7所述的基于几何代数的多环耦合机构奇异分析系统,其特征在于,第i个分支上的所有n个运动螺旋做外积运算张成的片积s
mi
表示该分支的运动空间:s
mi
=s
i1
∧s
i2
∧
…
∧s
in
其中s
ij
(j=1,
…
,n)表示第i个分支上的第j个运动副的运动螺旋,“∧”表示外积运算符号;第i个分支施加到动平台上的分支约束空间记为s
ci
:其中表示g6中的单位伪标量的逆,“δ”表示直射变换算子,其运算为交换表示螺旋的主部系数v
i
和副部系数b
i
。9.根据权利要求6所述的基于几何代数的多环耦合机构奇异分析系统,其特征在于,所述模块m3与模块m4中,等效支链的处理系统为:确定基础分支后,找出闭环中与基础分支耦合的耦合支链,第i个基础分支的约束空间为s
ci
,与第i个基础分支耦合的耦合支链约束空间为s
ci1
,s
ci2
,
…
,s
cij
,计算闭环上每个分支的约束空间的外积,表示为:s
ci
∧s
ci
。
j
10.根据权利要求9所述的基于几何代数的多环耦合机构奇异分析系统,其特征在于,若外积结果为0,说明两个分支的约束空间线性相关,则用其一条分支等效代替闭环结构进行奇异分析;
若外积结果不为0,将约束空间分解为约束子空间,判断和去除冗余的约束子空间,将线性不相关的约束子空间作并集,代替闭环的约束空间。
技术总结
本发明提供了一种基于几何代数的多环耦合机构奇异分析方法及系统,包括:选定机构的定平台和动平台,划分出基础分支与闭环中与其耦合的耦合分支,写出每个分支上运动副的运动螺旋,通过计算每个分支的运动空间进而得出其约束空间;判断耦合支链与基础支链的约束空间的关系,等效为新的约束空间;对所有包含闭环的基础分支进行以上步骤计算;去除将闭环等效后每个新的分支上冗余的约束螺旋,计算所有等效支链的约束空间的外积,得到外积系数,令外积系数为0得到机构的奇异位形。本发明的奇异分析方法只需确定多环耦合机构每个分支的运动螺旋即可进行分支约束空间的计算,进而求出机构的奇异位形,可以方便,简洁的对多环耦合机构进行奇异分析。机构进行奇异分析。机构进行奇异分析。
技术研发人员:肖煜 郭进群 柴馨雪
受保护的技术使用者:浙江理工大学
技术研发日:2022.07.21
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。